










具体原理见Feature extraction & image processing for computer vision (3rd edition) 4.4.1.4小节
# Harris Corner Detector
# Code - 4.18
# -*- coding:gb2312 -*-
import cv2
import numpy as np
import matplotlib.pyplot as plt
from skimage.feature import canny
# from scipy.ndimage import *
def Harris(img,op='H',w=4,k=0.1):
# below is wrong for trying to create a
# ndarray with demision number greater than 32
# img = np.ndarray(img, dtype=np.float32)
# if use np.mat, be ware of the difference in matrix multiply
img = np.array(img,dtype=np.float32)
# row,col = img.shape
# out = np.zeros(img.shape)
difx,dify=np.gradient(img)
# detect edge with cv2.Sobel
# EdgeX = cv2.Sobel(img, cv2.CV_32FC1, 1, 0)
# EdgeY = cv2.Sobel(img, cv2.CV_32FC1, 0, 1)
# Mag = np.sqrt(EdgeX ** 2 + EdgeY ** 2)
# or use canny edge detector from skimage.feature
Mag = canny(img, 1, 0.4, 0.2)
# compute autocorralation
difx2=difx**2
dify2=dify**2
difxy=difx*dify
# or use cv2.multiply
# difx2 = cv2.multiply(difx,difx)
# dify2 = cv2.multiply(dify,dify)
# difxy = cv2.multiply(difx, dify)
# mean filter in scipy.ndimage
# A = uniform_filter(difx2,size=w)
# B = uniform_filter(dify2,size=w)
# C = uniform_filter(difxy,size=w)
# or use mean filter in cv2
A = cv2.blur(difx2,(w,w))
B = cv2.blur(dify2,(w,w))
C = cv2.blur(difxy,(w,w))
if op =='H':
out = A*B - C**2 -k*(A+B)**2
out[Mag == 0] = 0
else:
out = (A*dify2-2*C*difxy+B*difx2)/(difx2+dify2+1)
out[difx2+dify2==0]=0
# next section for debug
# plt.subplot(221);plt.imshow(img)
# plt.subplot(222);plt.imshow(difx)
# plt.subplot(223);plt.imshow(difx2);plt.show()
# # plt.subplot(224);plt.imshow(C);plt.show()
return out
if __name__ == '__main__':
image = cv2.imread('u.tif', flags=0)
image = cv2.resize(image, (100, 100))
corimg = Harris(image, op='TI')
plt.subplot(121);plt.imshow(image);plt.title('Original')
plt.subplot(122);plt.imshow(corimg);plt.title('Harris Corner')
plt.show()图像处理结果:
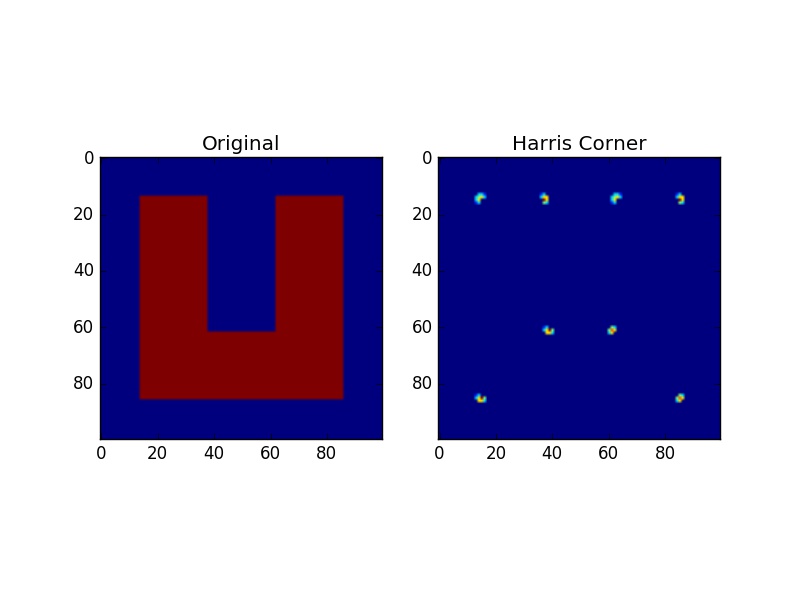
有几个问题:
1. numpy.array 和numpy.matrix的矩阵运算符定义不同。前者*表示矩阵点乘,后者表示矩阵相乘。
2. 计算梯度时,需要将图像数据转换成有符号数据类型。因为梯度有可能是负数。
3. Harris 算法的二次方程的旋转蕴含了主元分析的思想。















 5406
5406

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









