







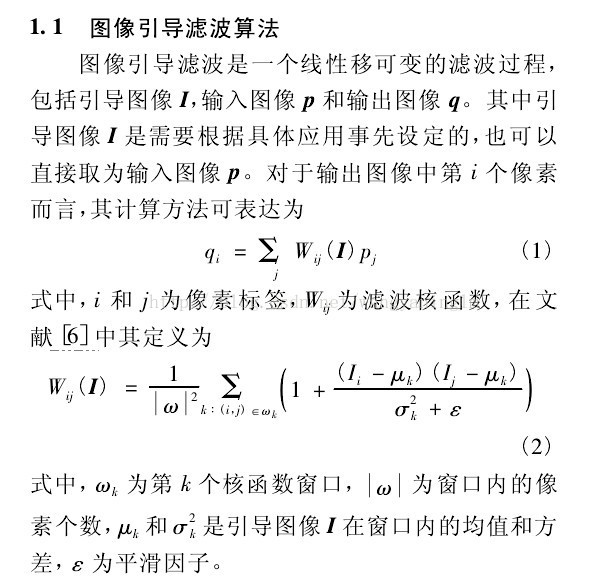
本文主要介绍导向滤波,引导滤波在滤波的同时,具有保边缘的特效,考虑了空间因素,可以用在图像去雾算法中对透射率t的优化中,能起到很好的效果
论文如下:
Guided Image Filtering
Kaiming He , Jian Sun , and Xiaoou Tang ,
Department of Information Engineering, The Chinese University of Hong Kong
Microsoft Research Asia
Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences, China
原理如下:
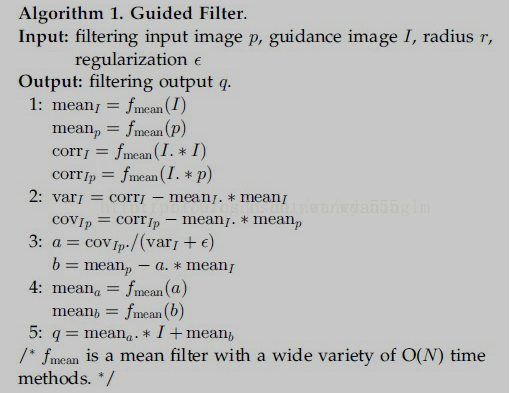
代码如下:
#include "afxwin.h"
#include <cv.h>
#include "cxcore.h"
#include <highgui.h>
#include<vector>
#include <iostream>
#include "opencv2/core/core.hpp"
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
void Ctry::OnTryTyr1() //消息响应函数
{
int r = 4;
double eps = 0.01;
Mat image_src = imread("C:\\Users\\Administrator\\Desktop\\38.jpg", CV_LOAD_IMAGE_COLOR);
vector<Mat> bgr_src, bgr_dst;
split(image_src, bgr_src);//分解每个通道
Mat dst_color;
Mat temp;
for (int i = 0; i<3; i++)
{
Mat I = getimage(bgr_src[i]);
Mat p = I.clone();
Mat q = guidedFilter2(I, p, r, eps);
bgr_dst.push_back(q);
}
merge(bgr_dst, dst_color);
imwrite("C:\\Users\\Administrator\\Desktop\\result2.jpg", dst_color*255);
double time2 = 0;
time2 = (double)getTickCount();
Mat image_gray(image_src.size(), CV_8UC1);
cvtColor(image_src, image_gray, CV_BGR2GRAY);
Mat I = getimage(image_gray);
Mat p = I.clone();
Mat Output;
guidedFilter2(I, p, r, eps).copyTo(Output);
imshow("方法:", Output);
Mat tt;
Output.convertTo(tt, -1,255.0);
imwrite("C:\\Users\\Administrator\\Desktop\\mert.JPG", tt);
time2 = 1000 * ((double)getTickCount() - time2) / getTickFrequency();
cout << endl << "Time of guided filter2 for runs: " << time2 << " milliseconds." << endl;
waitKey(0);
}
//convert image depth to CV_64F
Mat Ctry::getimage(Mat &a)
{
int hei = a.rows;
int wid = a.cols;
Mat I(hei, wid, CV_64FC1);
//convert image depth to CV_64F
a.convertTo(I, CV_64FC1, 1.0 / 255.0);
return I;
}
Mat Ctry::guidedFilter2(cv::Mat I, cv::Mat p, int r, double eps)
{
/*
% GUIDEDFILTER O(1) time implementation of guided filter.
%
% - guidance image: I (should be a gray-scale/single channel image)
% - filtering input image: p (should be a gray-scale/single channel image)
% - local window radius: r
% - regularization parameter: eps
*/
cv::Mat _I;
I.convertTo(_I, CV_64FC1);
I = _I;
cv::Mat _p;
p.convertTo(_p, CV_64FC1);
p = _p;
//[hei, wid] = size(I);
int hei = I.rows;
int wid = I.cols;
//N = boxfilter(ones(hei, wid), r); % the size of each local patch; N=(2r+1)^2 except for boundary pixels.
cv::Mat N;
cv::boxFilter(cv::Mat::ones(hei, wid, I.type()), N, CV_64FC1, cv::Size(r, r));
//mean_I = boxfilter(I, r) ./ N;
cv::Mat mean_I;
cv::boxFilter(I, mean_I, CV_64FC1, cv::Size(r, r));
//mean_p = boxfilter(p, r) ./ N;
cv::Mat mean_p;
cv::boxFilter(p, mean_p, CV_64FC1, cv::Size(r, r));
//mean_Ip = boxfilter(I.*p, r) ./ N;
cv::Mat mean_Ip;
cv::boxFilter(I.mul(p), mean_Ip, CV_64FC1, cv::Size(r, r));
//cov_Ip = mean_Ip - mean_I .* mean_p; % this is the covariance of (I, p) in each local patch.
cv::Mat cov_Ip = mean_Ip - mean_I.mul(mean_p);
//mean_II = boxfilter(I.*I, r) ./ N;
cv::Mat mean_II;
cv::boxFilter(I.mul(I), mean_II, CV_64FC1, cv::Size(r, r));
//var_I = mean_II - mean_I .* mean_I;
cv::Mat var_I = mean_II - mean_I.mul(mean_I);
//a = cov_Ip ./ (var_I + eps); % Eqn. (5) in the paper;
cv::Mat a = cov_Ip / (var_I + eps);
//b = mean_p - a .* mean_I; % Eqn. (6) in the paper;
cv::Mat b = mean_p - a.mul(mean_I);
//mean_a = boxfilter(a, r) ./ N;
cv::Mat mean_a;
cv::boxFilter(a, mean_a, CV_64FC1, cv::Size(r, r));
mean_a = mean_a / N;
//mean_b = boxfilter(b, r) ./ N;
cv::Mat mean_b;
cv::boxFilter(b, mean_b, CV_64FC1, cv::Size(r, r));
mean_b = mean_b / N;
//q = mean_a .* I + mean_b; % Eqn. (8) in the paper;
cv::Mat q = mean_a.mul(I) + mean_b;
return q;
}效果图:
















 1687
1687











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









