本文主要介绍运算符重载和友元的类设计,通过定义一个矢量类来模拟随机漫步。矢量类分两种模式,直角坐标模式和极坐标模式。该函数允许用户选择行走的距离和补偿。该程序用一个变量表示位置,并报告到达指定距离住所需的部署。
本文的重点是是理解运算符重载和友元函数
代码如下:
vector.h文件
#ifndef VECTOR_H_
#define VECTOR_H_
#include<iostream>
namespace VECTOR
{
class Vector
{
public:
enum Mode{RECT,POL};
// RECT for rectangular ,POL for ploar modes
private:
double x; // horizontal value
double y; // vertical value
double mag; // length of vector
double ang; // direction of vector in degrees
Mode mode; //RECT or POL
//private methods for setting values
void set_mage();
void set_ang();
void set_x();
void set_y();
public:
Vector();
Vector(double n1,double n2,Mode form = RECT);
void reset(double n1,double n2,Mode form = RECT);
~Vector();
double xval() const {return x;} //report x value
double yval() const {return y;} //report y value
double magval() const {return mag;}// report magnitude
double angval() const {return ang;}//report angle
void polar_mode(); //set mode to pol
void rect_mode(); // set mode to rect
//operator overloading
Vector operator + (const Vector &b) const;
Vector operator - (const Vector &b) const;
Vector operator * (double n) const;
Vector operator - () const;
//friends
friend Vector operator * (double n,const Vector &a);
friend std::ostream & operator <<(std::ostream & os,const Vector &v);
};
}
#endif
vector.cpp文件
#include<cmath>
#include"vector.h"
using std::sqrt;
using std::sin;
using std::cos;
using std::atan;
using std::atan2;
using std::cout;
namespace VECTOR
{
const double Rad_to_deg = 45.0/atan(1.0);//should be about 57.2957795130823
//private methods
//calculates magnitude from x and y
void Vector::set_mage()
{
mag=sqrt(x * x + y * y);
}
void Vector::set_ang()
{
if(x==0.0&&y==0.0)
ang=0.0;
else
ang=atan2(y,x);
}
//set x,y from polar coordinate
void Vector::set_x()
{
x=mag*cos(ang);
}
void Vector ::set_y()
{
y=mag*sin(ang);
}
//public methods
Vector::Vector()
{
x = y = mag = ang = 0.0;
mode=RECT;
}
Vector::Vector(double n1,double n2,Mode form)
{
mode = form;
if(form==RECT)
{
x=n1;
y=n2;
set_mage();
set_ang();
}
else if(form==POL)
{
mag=n1;
ang=n2;
set_x();
set_y();
}
else
{
cout << "incorrect 3rd argument to vector()---";
cout << "vector set to 0\n";
x=y=mag=ang=0.0;
mode=RECT;
}
}
void Vector::reset(double n1,double n2,Mode form)
{
mode = form;
if(form==RECT)
{
x=n1;
y=n2;
set_mage();
set_ang();
}
else if(form==POL)
{
mag=n1;
ang=n2;
set_x();
set_y();
}
else
{
cout << "incorrect 3rd argument to vector()---";
cout << "vector set to 0\n";
x=y=mag=ang=0.0;
mode=RECT;
}
}
Vector::~Vector()
{
}
void Vector::polar_mode()
{
mode = POL;
}
void Vector::rect_mode()
{
mode = RECT;
}
Vector Vector::operator+(const Vector &b) const
{
return Vector(x+b.x,y+b.y);
}
Vector Vector::operator-(const Vector &b) const
{
return Vector(x-b.x,y-b.y);
}
Vector Vector::operator*(double n) const
{
return Vector(n*x,n*y);
}
Vector Vector::operator - () const
{
return Vector(-x,-y);
}
Vector operator *(double n,const Vector &a)
{
return a*n;
}
std::ostream & operator << (std::ostream &os,const Vector &v)
{
if (v.mode==Vector::RECT)
{
os << "(x,y) = (" <<v.x << ", " << v.y << ")";
}
else if (v.mode==Vector::POL)
{
os << "(m,a)= (" <<v.mag << ", " << v.ang << ")";
}
else
os << "Vector object maod is invalid";
return os;
}
}
main()函数
#include <iostream>
#include <cstdlib>
#include<ctime>
#include "vector.h"
int main()
{
using namespace std;
using VECTOR::Vector;
srand(time(0));
double direction;
Vector step;
Vector result(0.0,0.0);
unsigned long steps=0;
double target;
double dstep;
cout << "enter target distance (q to quit)";
while (cin >> target)
{
cout << "enter step length:";
if(!(cin>>dstep))
break;
while(result.magval()<target)
{
direction=rand()%360;
step.reset(dstep,direction,Vector::POL);
result = result + step;
steps++;
}
cout << "after " << steps << "steps,the subject has the following location:\n";
cout <<result << endl;
result.polar_mode();
cout << "or\n" << result <<endl;
cout << "average outward distance per step = " << result.magval()/steps << endl;
steps=0;
result.reset(0.0,0.0);
cout << "enter target distance(q to quit):";
}
cout << "byte\n";
cin.clear();
while(cin.get()!='\n')
continue;
return 0 ;
}
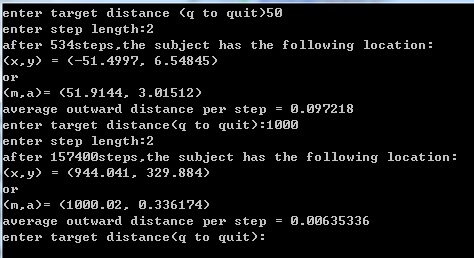
运行结果如下:























 8万+
8万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









