







 本文介绍了Kinect v2.0的人脸跟踪技术,通过获取彩色图像帧和深度数据进行人脸检测。文章指出,Kinect可能利用骨骼数据、深度信息和彩色图像进行人脸检测,尤其在低光照环境下,深度信息对人脸检测起关键作用。人脸框定通过FaceBoundingBoxInColorSpace函数实现,同时探讨了可能的2D和3D融合技术用于提高人脸检测效果。
本文介绍了Kinect v2.0的人脸跟踪技术,通过获取彩色图像帧和深度数据进行人脸检测。文章指出,Kinect可能利用骨骼数据、深度信息和彩色图像进行人脸检测,尤其在低光照环境下,深度信息对人脸检测起关键作用。人脸框定通过FaceBoundingBoxInColorSpace函数实现,同时探讨了可能的2D和3D融合技术用于提高人脸检测效果。
~~有兴趣的小伙伴,加kinect算法交流群:462964980。
人脸跟踪
对于kinect人脸检测的原理找到一点,然而…没什么用,具体解读没有找到,以下是自己结合代码,总结的一些信息,有不对的地方请给出指正。
前文已经提到kinect获取数据流接口的步骤:Sensor -> Source -> Reader -> Frame -> Data,在进行人脸检测首先需要获取彩色图像帧,关键实现代码如下:
hr = GetDefaultKinectSensor(&m_pKinectSensor);
hr = m_pKinectSensor->Open();
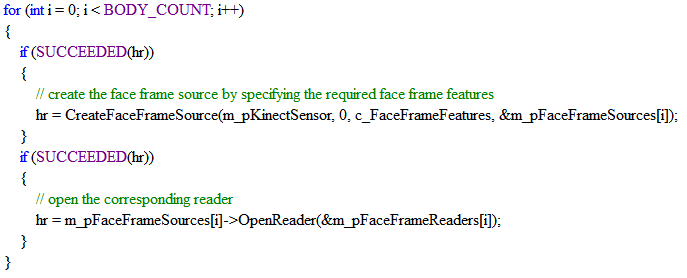
因为kinect最多可以跟踪六个人的骨骼,而在获取人脸帧的阅读器,用到了六个人的ID,所以可以初步判定,在人脸检测时用到了骨骼数据。
之后通过阅读器获取最近的一帧数据:
hr = m_pFaceFrameReaders[iFace]->AcquireLatestFrame(&pFaceFrame);
然后获取有效帧: hr = pFaceFrame->get_IsTrackingIdValid(&bFaceTracked);有效帧的判断是根据检测ID是否有效。
获取最终的脸部有效帧:
hr = pFaceFrame->get_FaceFrameResult(&pFaceFrameResult);
<
 订阅专栏 解锁全文
订阅专栏 解锁全文


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











