







 这篇博客介绍了作者使用51单片机设计的一款智能小车,该小车具备蓝牙启动、变速、蔽障、舵机摆臂攻击和目标搜索等功能。虽然完整的程序因未及时备份而丢失,但作者分享了实现部分功能的源码。
这篇博客介绍了作者使用51单片机设计的一款智能小车,该小车具备蓝牙启动、变速、蔽障、舵机摆臂攻击和目标搜索等功能。虽然完整的程序因未及时备份而丢失,但作者分享了实现部分功能的源码。
这个是为了去年参加某比赛的作品。
功能:
蓝牙启动,
变速,
蔽障,
舵机摆臂攻击,
目标搜索,
其它
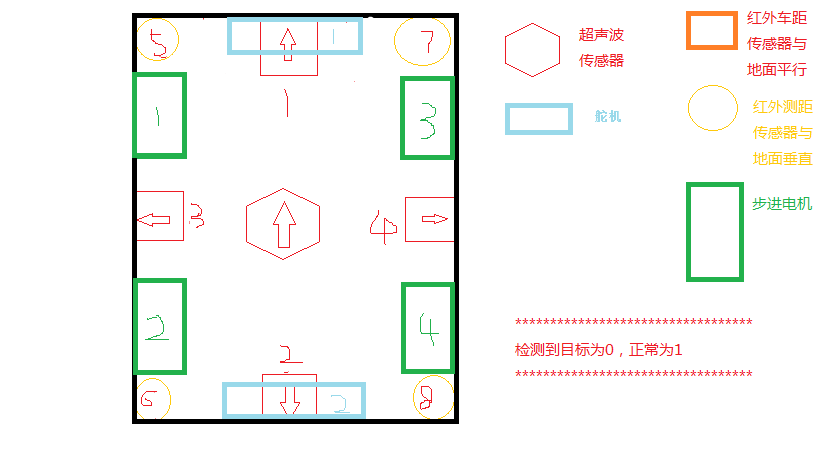
硬件搭建布局图:

在实验室写的程序,没及时备份。。完整版的程序没有了!
只实现部分模块功能的源码:
#include "reg52.h"
#include<math.h>
#define uint unsigned int
#define uchar unsigned char
#define Cycle 20000 //定义周期
uint PWM_Value[8];
uchar order=0; //中断步长
//按键检测
//sbit key1=P2^0;
//sbit key2=P2^1;
//PWM的输出端口
sbit PWM_OUT0=P2^5;
sbit PWM_OUT1=P2^6;
//红外检测口
sbit H1 = P0^0;
sbit H2 = P0^1;
sbit H3 = P0^2;
sbit H4 = P0^3;
sbit H5 = P0^4;
sbit H6 = P0^5;
sbit H7 = P0^6;
sbit H8 = P0^7;
//步进电机方向口
sbit B1 = P1^4;
sbit B2 = P1^5;
sbit B3 = P1^6;
sbit B4 = P1^7;
//步进电机脉冲口
sbit BU1 = P1^0;
sbit BU2 = P1^1;
sbit BU3 = P1^2;
sbit BU4 = P1^3;
int i,key1,key2;
/********************************************
延时程序
*********************************************/
void delay(uint t,uint ti)
{
uint k;
while(t--)
{
for(k=0; k<ti; k++)
{ }
}
}
/********************************************************
*
*步进电机运行
* //正常为20,加速16;delay:正常(2,50)加速(2,40) 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章

















 5615
5615

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









