






tty串口驱动程序设计
tty驱动程序构架
在Linux系统中,终端是一类字符型设备,它包括多种类型,通常使用tty来简称各种类型的终端设备。
1、 串口中断(/dev/ttyS*)
2、 控制台终端(/dev/console)
3、 虚拟终端(/dev/tty*)
控制台
供内核使用的终端为控制台。控制台在Linux启动时,通过命令console=…指定,如果没有指定控制台,系统把第一个注册的终端tty作为控制台。
终端体系
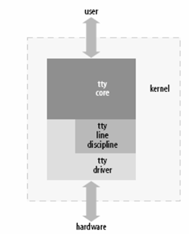
在Linux中,tty体系分为:TTY核心,tty线路规程,tty驱动3部分。tty核心从用户获取要发送给tty设备的数据,然后把数据传递给tty线路规程,他对数据进行处理后,负责把数据传递到tty驱动程序,tty驱动程序负责格式化数据,并通过硬件发送出去。
从硬件收到的数据向上通过tty驱动,进入tty线路规程,再进入tty核心,最后被用户获取。tty驱动可以直接和tty核心通讯,但是通常tty线程规划会修改在两者之间传送的数据。tty驱动不能直接和线路规程通信,甚至不知道它的存在,线路规程的工作是格式化从用户或者硬件收到的数据。这种格式化常常实现为一个协议,如PPP或Bluetooth。
驱动设计
读操作
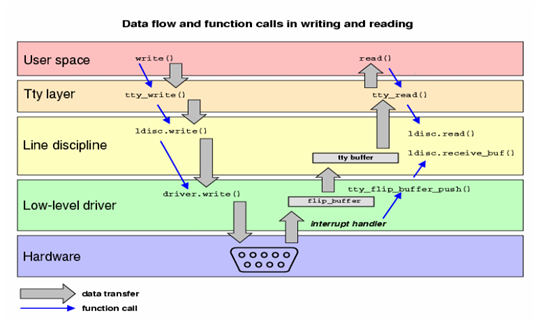
tty驱动从硬件收到数据后,负责把数据传递到tty核心,tty核心将从tty驱动收到的数据缓存到一个tty_flip_buffer类型的结构中。该结构包含两个数据数组。从TTY设备接设备接收到的数据被存储于第一个数组,当这个数组满,等待数据的用户将被通知。当用户从这个数组读数据时数据时,任何从TTY驱动驱动新来的数据将被存储在第2个数组。当第二个数组存满后,数据再次提交给用户,并且驱动又开始填充第1个数组,以此交替。
驱动描述
structuart_driver {
struct module *owner;
const char *driver_name; //驱动名
const char *dev_name; //设备名
int major; //主设备号
int minor; //起始次设备号
int nr; //设备数
struct console *cons;
struct uart_state *state;
struct tty_driver *tty_driver;
};
驱动注册
int uart_register_driver(struct uart_driver *drv)
端口描述
struct uart_port
{
spinlock_t lock; /* 端口锁 */
unsigned int iobase; /* IO端口基地址 */
unsigned char __iomem *membase; /* IO内存基地址 */
unsigned int irq; /* 中断号*/
unsigned char fifosize; /*传输fifo大小*/
const struct uart_ops *ops;
…… …… …… ………… …… …… …… …… …… ……
}
操作串口
struct uart_ops
{
unsigned int(*tx_empty)(struct uart_port*);
void(*set_mctrl)(struct uart_port *, unsigned int mctrl);
unsigned int(*get_mctrl)(struct uart_port*);
void(*stop_tx)(struct uart_port*); //停止发送
void(*start_tx)(struct uart_port*); //开始发送
void(*send_xchar)(struct uart_port *, char ch); //发送xchar
void(*stop_rx)(struct uart_port*); //停止接收
。。。。。。 。。。。。。 。。。。。。
}
添加端口
int uart_add_one_port(struct uart_driver*drv, struct uart_port *port)
操作流程
1、 定义一个usrt_druver的变量,并初始化;
2、 使用uart_register_driver来注册这个驱动;
3、 初始化uart_port和ops
4、 调用uart_add_one_port()添加初始化好的uart_port
串口的打开与发送
串口打开
1、 使能串口接收功能:rx_enabled
2、 为数据接收注册中断处理程序
3、 使能串口发送功能tx_enabled
4、 为数据发送注册中断处理程序
串口发送数据
1、 判断x_char是否为0,如果不为0,则发送x_char。
2、 如果发送缓冲区或驱动为停止发送,取消发送。
3、 循环发送,循环条件:发送缓冲区不为空
4、 如果发送缓冲区的剩余数据量<256,则唤醒之前阻塞的发送进程。
5、 如果发送缓冲为空,则关闭发送使能。















 726
726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









