









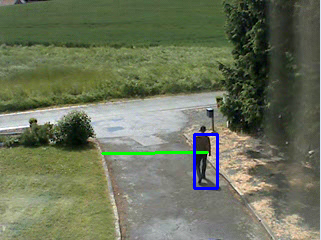
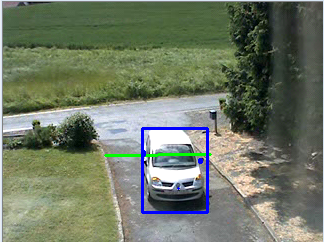
原视频:
假设1:已经画出拌线,根据 opencv-视频处理--画线(越线、拌线)
假设2:已经检测出运动物体,根据 opencv-视频处理-实时的前景检测-Vibe算法或者其它的前景检测算法

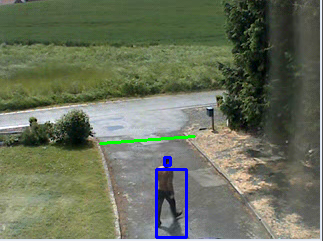

拌线检测(越线检测),要做的目标就是运动物体(上图中蓝色框)什么时候碰到 越线(拌线)?
【数学表述】:线段和矩形是什么时候相交的?
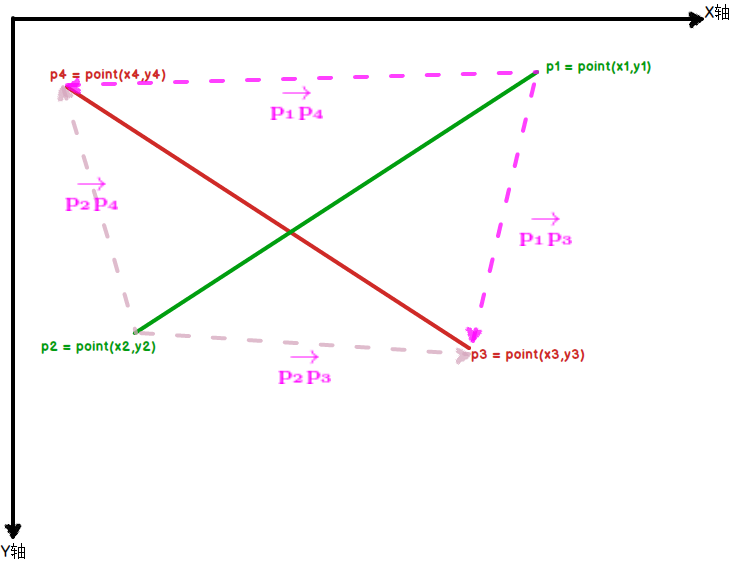
【问题1】 首先 怎么证明下述两条线段是相交的呢?
假设两条线段,如下图所示:
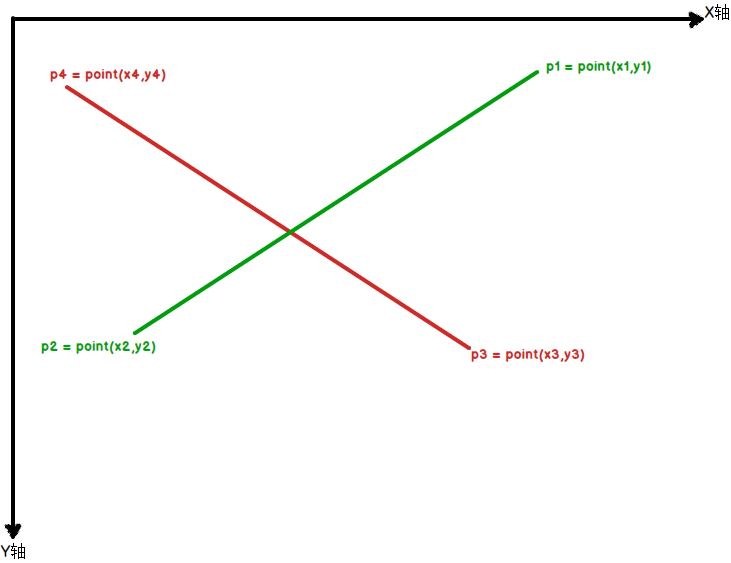
【答案】只要证明任意一条线段的两个端点在另一条的两侧。
【证明】:我们先证明p1和p2在线段p3p4的两侧。同理可证p3和p4在线段p1p2的两侧。我们只要证明




用opencv的程序表示为:
//判断两条线段相交
bool intersection(const vector<Point> & line1, const vector<Point> &line2)//vector<Point> line(2),代表一线段
{
CV_Assert(line1.size() == line2.size());
CV_Assert(line1.size()==2);
Point point1_11,point1_12,point1_21,point1_22;
//首先判断line1的两个端点,在line2的两侧
point1_11 = line2[0] - line1[0];
point1_12 = line2[1]-line1[0];
point1_21 = line2[0]-line1[1];
point1_22 = line2[1]-line1[1];
//point1_11.cross(point1_12)*point1_21.cross(point1_22)<0;//----------表明在两侧
//再次判断line2的两个端点,在line1的两侧
Point point2_11,point2_12,point2_21,point2_22;
point2_11 = line1[0]-line2[0];
point2_12 = line1[1] - line2[0];
point2_21 = line1[0] -line2[1];
point2_22 = line1[1]-line2[1];
//point2_11.cross(point2_12)*point2_21.cross(point2_22)<0;
return ( point1_11.cross(point1_12)*point1_21.cross(point1_22)<0 && point2_11.cross(point2_12)*point2_21.cross(point2_22)<0 );
}
---------------------------------------------------------------------------------------------
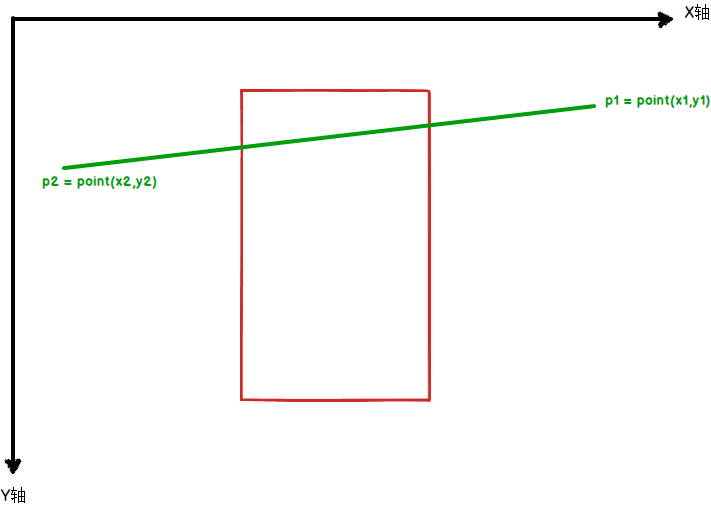
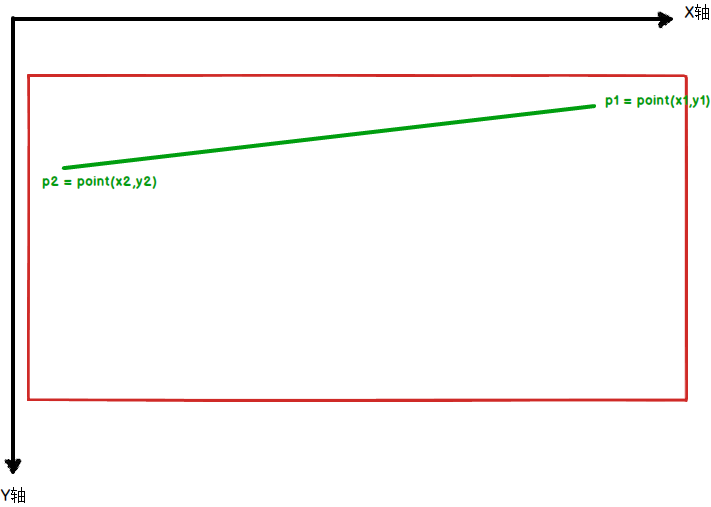
【问题2】怎么证明线段和矩形是相交的呢?
【答案】只要证明线段和矩形的任意一条线段即可,根据【问题1】的回答,或者整个线段都在矩形内部
用图表示为:
用opencv的程序可以表示为:
//判断矩形和一条线段相交(线段只要与矩形的一条边相交,就可以判定相交 或者 线段在矩形内部)
bool rect_line_intersection(const vector<Point> & line,const Rect & targetRect)//rect的四个顶点(roi.x,roi.y),(roi.x,roi.y+roi.height-1),(roi.x+roi.width-1,roi.y),(roi.x+roi.width-1,roi.y+roi.height-1)
{
CV_Assert(line.size()==2);
//先判断第一种情况:线段在矩形内部
if(line[0].inside(targetRect) && line[1].inside(targetRect))
return true;
//再判断第二种情况,线段和矩形的至少一条边相交
//---第一步:提取矩形的四条边
vector<Point> line1;
line1.clear();
line1.push_back(Point(targetRect.x,targetRect.y));
line1.push_back(Point(targetRect.x,targetRect.y+targetRect.height-1));
if(intersection(line1,line))
return true;
vector<Point> line2;
line2.clear();
line2.push_back(Point(targetRect.x+targetRect.width-1,targetRect.y));
line2.push_back(Point(targetRect.x+targetRect.width-1,targetRect.y+targetRect.height -1));
if( intersection(line2,line))
return true;
vector<Point> line3;
line3.clear();
line3.push_back(Point(targetRect.x,targetRect.y));
line3.push_back(Point(targetRect.x+targetRect.width-1,targetRect.y));
if( intersection(line3,line))
return true;
vector<Point> line4;
line4.clear();
line4.push_back(Point(targetRect.x,targetRect.y+targetRect.height-1));
line4.push_back(Point(targetRect.x+targetRect.width-1,targetRect.y+targetRect.height-1));
if( intersection(line2,line) )
return true;
//return ( intersection(line1,line) || intersection(line2,line)||intersection(line3,line)||intersection(line4,line) );
return false;
}
整个工程的源码放在【6】中














 1971
1971











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









