







Ubuntu下生成bin文件和.so文件(ubuntu下.so文件对应是windows下.dll文件,都为动态链接库)## 标题
编译链接生成.so文件或者可执行文件时候,需要注意如下几点:
每一个工程里面必须包含这三个文件,并且里面有严格的书写规范。
naoqi-sdk-xxx.xx.xx/doc/examples/vision/motionexample 为例子进行讲解
1、文件如下:
cmake_minimum_required(VERSION 2.6.4 FATAL_ERROR)
project(motionexample[工程名])
find_package(qibuild[固定格式,qibuild])
option(MOTIONEXAMPLE[大写工程名]_IS_REMOTE
"module is compiled as a remote module (ON or OFF)"
ON[此处是OFF还是ON,就看你是准备生成sdk/bin文件下的可执行文件还是生成naiqi/sdk目录下的.so文件。如果你选择ON,接下来你将生成的是dk/bin文件下的可执行文件,如果你选择的是OFF,接下来你将身上是.so文件])
set(_srcs
main.cpp
almotionexample.h
almotionexample.cpp[这里包含着你工程cpp文件]
)
if(MOTIONEXAMPLE[工程名大学]_IS_REMOTE)
add_definitions(" -D[-D你不用管,固定格式]MOTIONEXAMPLE[工程名大学]_IS_REMOTE ")
qi_create_bin(motionexample[工程名小写] ${_srcs})
else()
qi_create_lib(motionexample[工程名大学] SHARED ${_srcs} SUBFOLDER naoqi)
endif()
qi_use_lib(motionexample[工程名小写] ALCOMMON ALMATH)2、接下来是对qiproject.xml文件进行说明:
<project name="motionexample[此处是你的工程名]"/>3、接下来是对mian.cpp文件进行说明:
/**
* @author Chris Kilner
* Copyright (c) Aldebaran Robotics 2007 All Rights Reserved
*/
#include <signal.h>
#include <boost/shared_ptr.hpp>
#include <alcommon/albroker.h>
#include <alcommon/almodule.h>
#include <alcommon/albrokermanager.h>
#include <alcommon/altoolsmain.h>
#include "almotionexample.h"
#ifdef MOTIONEXAMPLE_IS_REMOTE
# define ALCALL
#else
# ifdef _WIN32
# define ALCALL __declspec(dllexport)
# else
# define ALCALL
# endif
#endif
extern "C"[外部接口函数,为python程序调用C程序提供了方便]
{
ALCALL int _createModule(boost::shared_ptr<AL::ALBroker> pBroker)
{
// init broker with the main broker instance
// from the parent executable
AL::ALBrokerManager::setInstance(pBroker->fBrokerManager.lock());
AL::ALBrokerManager::getInstance()->addBroker(pBroker);
AL::ALModule::createModule<ALMotionExample>( pBroker, "ALMotionExample[此处是你提供给外部接口的名称,通过这个接口,python程序可以调用里面函数]");
return 0;
}
ALCALL int _closeModule()
{
return 0;
}[外部接口书写格式]
} // extern "C"
#ifdef MOTIONEXAMPLE_IS_REMOTE
int main(int argc, char *argv[])
{
// pointer to createModule
TMainType sig;
sig = &_createModule;
// call main
ALTools::mainFunction("motionexample",argc, argv,sig);
}
#endif接下来是如何编译.so文件
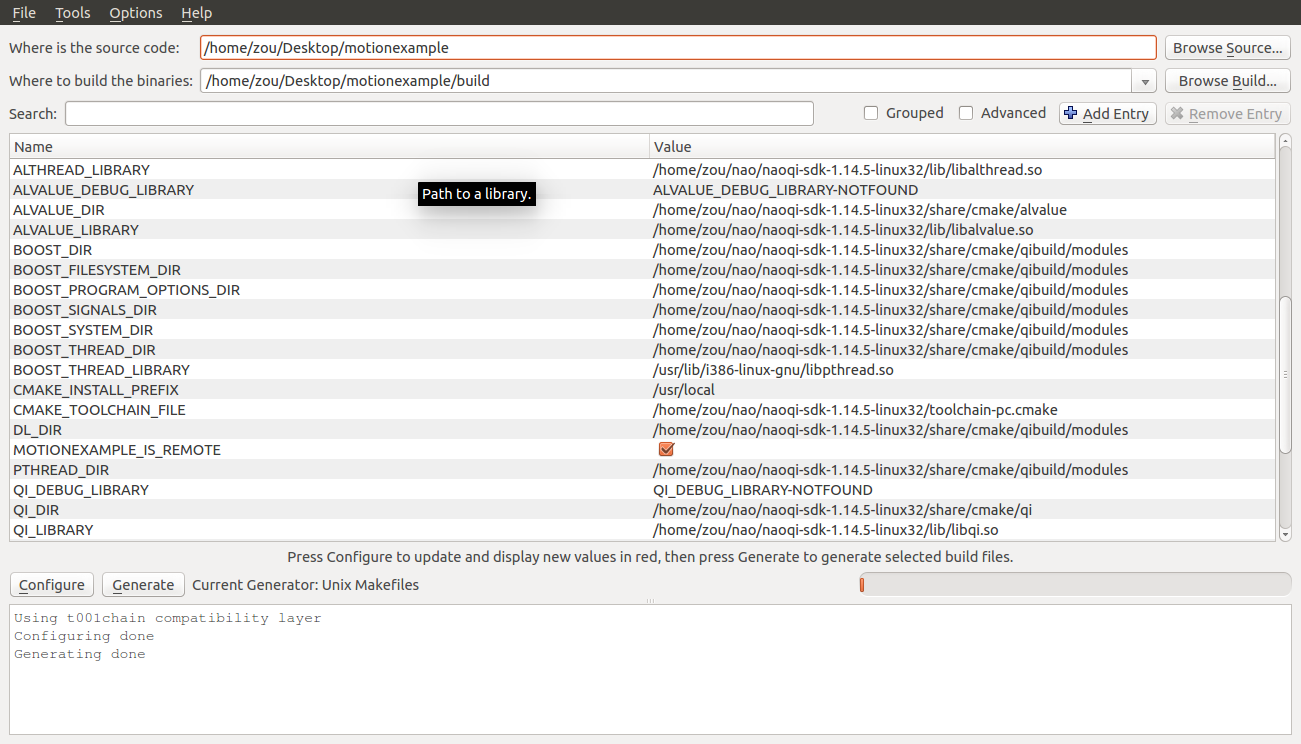
打开cmake界面,where is the source code上导入你的工程路径,where to build the binaries写入你需要生成makefile文件路径。(建议你就在where is the source code你的工程路径上后加/build即可)
以我的工程路径为例:
where is the source code 上写入”home/zou/Desktop/motionexample”
where to build the binaries 上写入”home/zou/Desktop/motionexample/build”
如果你想生成可执行文件:
点解configure,选中MOTIONEXAMPLE_IS_REMOTE,再Generate。
进入终端,进入工程文件下build下目录,输入make命令,系统自动生成可执行文件。
可执行文件所在位置在build/sdk/bin的目录下。
如果你想生成.so文件:
点解configure,不选中MOTIONEXAMPLE_IS_REMOTE,再Generate。
进入终端,进入工程文件下build下目录,输入make命令,系统自动生成.so文件。
.so文件所在位置在naoqi-sdk/lib/naoqi的目录下。















 895
895

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









