






1开场白
环境:
处理器架构:arm64
内核源码:linux-5.10.50
ubuntu版本:20.04.1
代码阅读工具:vim+ctags+cscope
无论是任务处于用户态还是内核态,经常会因为等待某些事件而睡眠(可能是等待IO读写完成,也可能等待其他内核路径释放一把锁等)。本文来探讨一下,任务处于睡眠中有哪些状态?睡眠对于任务来说究竟意味着什么?内核是如何管理睡眠的任务的?我们会结合内核源代码来分析任务的睡眠,力求全方位角度来剖析。
注:由于篇幅问题,文章分为上下两篇,且这里不区分进程和任务,统一使用任务来表示进程。
主要讲解以下内容:
睡眠的三种状态
睡眠的内核原理
用户态睡眠
内核态睡眠
总结
2. 睡眠的三种状态
任务睡眠有三种状态:
浅度睡眠
中度睡眠
深度睡眠
2.1 浅度睡眠
进程描述符的state使用TASK_INTERRUPTIBLE表示这种状态。
为可中断的睡眠状态,这里可中断是可以被信号所打断(唤醒)。
这里给出被信号打断/唤醒的代码路径:
kernel/signal.c
SYSCALL_DEFINE2(kill, pid_t, pid, int, sig)
->kill_something_info
->__kill_pgrp_info
->group_send_sig_info
->do_send_sig_info
->send_signal
->__send_signal
->complete_signal
->signal_wake_up
-> signal_wake_up_state(t, resume ? TASK_WAKEKILL : 0)
->wake_up_state(t, state | TASK_INTERRUPTIBLE)
->try_to_wake_up
可以看到在信号传递的时候,会通过signal_wake_up唤醒从处于可中断睡眠状态的任务。
2.2 中度睡眠
进程描述符的state使用TASK_KILLABLE表示这种状态。
可以被致命信号所打断。
这里给出被致命信号打断/唤醒的代码路径:
include/linux/sched.h
#define TASK_KILLABLE (TASK_WAKEKILL | TASK_UNINTERRUPTIBLE)
kernel/signal.c
SYSCALL_DEFINE2(kill, pid_t, pid, int, sig)
->kill_something_info
->__kill_pgrp_info
->group_send_sig_info
->do_send_sig_info
->send_signal
->__send_signal
->complete_signal
->
if (sig_fatal(p, sig) &&
¦ !(signal->flags & SIGNAL_GROUP_EXIT) &&
¦ !sigismember(&t->real_blocked, sig) &&
¦ (sig == SIGKILL || !p->ptrace)) { //致命信号
...
signal_wake_up(t, 1);
-> signal_wake_up_state(t, resume ? TASK_WAKEKILL : 0) // resume == 1
-> wake_up_state(t, state | TASK_INTERRUPTIBLE)
->try_to_wake_up
...
}
2.3 深度睡眠
进程描述符的state使用TASK_UNINTERRUPTIBLE表示这种状态。
为不可中断的睡眠状态,不能被任何信号所唤醒(特定条件没有满足发生信号唤醒可能导致数据不一致等问题,这种场景使用这种睡眠状态,如等待IO读写完成)。
3. 睡眠的内核原理
睡眠都是主动发生调度,即主动调用主调度器。
睡眠的主要步骤如下:
1)设置任务状态为睡眠状态
2)记录睡眠的任务
3)发起主动调度
下面我们来详细解读下这几个步骤:
3.1 设置任务状态为睡眠状态
这一步很有必要,一来标识进入了睡眠状态,二来是主调度器会根据睡眠标志将任务从运行队列删除。
注:睡眠状态描述见上一小节!
3.2 记录睡眠的任务
这一步也非常有必要,内核会将即将睡眠的任务记录下来,要么加入到链表中管理,要么使用数据结构记录。
如延迟睡眠场景,内核将即将睡眠的任务记录在定时器相关的数据结构中;可睡眠的信号量场景中,内核将即将睡眠的任务加入到信号量的相关链表中。
记录的目的在于:当唤醒条件满足时,唤醒函数能够找到想要唤醒的任务。
3.3 发起主动调度
这一步是真正进行睡眠的操作,主要是调用主调度器来发起主动调度让出处理器。
下面我们来看下主调度器为任务睡眠所作的处理:
kernel/sched/core.c
__schedule
->
prev_state = prev->state; //获得前一个任务状态
if (!preempt && prev_state) { //如果是主动调度 且任务状态不为0
if (signal_pending_state(prev_state, prev)) { //有挂起的信号
prev->state = TASK_RUNNING; //设置状态为可运行
} else {
deactivate_task(rq, prev, DEQUEUE_SLEEP | DEQUEUE_NOCLOCK); //cpu运行队列中删除任务
}
}
next = pick_next_task(rq, prev, &rf); //选择下一个任务
context_switch //进行上下文切换
来看下deactivate_task对于睡眠任务做的主要工作:
deactivate_task
->deactivate_task(rq, prev, DEQUEUE_SLEEP | DEQUEUE_NOCLOCK)
->p->on_rq = (flags & DEQUEUE_SLEEP) ? 0 : TASK_ON_RQ_MIGRATING; //设置任务的on_rq 为0 标识是睡眠
dequeue_task(rq, p, flags);
->p->sched_class->dequeue_task(rq, p, flags)
->dequeue_task_fair
->dequeue_entity
...
if (se != cfs_rq->curr) //不是cpu当前 任务
__dequeue_entity(cfs_rq, se); //cfs运行队列删除
->se->on_rq = 0; //标识调度实体不在运行队列!!!
->if (!(flags & DEQUEUE_SLEEP))
se->vruntime -= cfs_rq->min_vruntime; //调度实体的虚拟运行时间 减去 cfs运行队列的最小虚拟运行时间
deactivate_task会设置任务的on_rq 为0来 标识是睡眠 ,然后 调用到调度类的dequeue_task方法,在cfs中设置se->on_rq = 0标识调度实体不在cfs队列。
可以看到,发起主动调度的时候,在主调度器中会做判断:如果是主动调度且任务状态不为0 (即为不是可运行的TASK_RUNNING)时,如果没有挂起的信号,就会将任务从cpu的运行队列中“删除”,然后选择下一个任务,进行上下文切换。
将即将睡眠的任务从cpu的运行队列中“删除”意义重大:主调度器再次选择下一个任务的时候不会在选择睡眠的任务(因为主调度器总是在运行队列中选择任务运行,除非任务被唤醒,重新加入运行队列)。
注意:1.这里的删除指的是设置对应标志如p->on_rq=0,se->on_rq = 0,当选择下一个任务的时候不会在加入运行队列中。2.即将睡眠的任务是cpu上的当前任务(curr指向)。3.调用主调度器后,即将睡眠的任务不会再次加入cpu运行队列,除非被唤醒。
再来看下选择下一个任务的时候会做哪些事情和睡眠有关(暂不考虑组调度情况):
pick_next_task
->class->pick_next_task
->pick_next_task_fair //kernel/sched/fair.c
->if (prev)
put_prev_task(rq, prev); //对前一个任务处理
se = pick_next_entity(cfs_rq, NULL); //选择下一个任务
set_next_entity(cfs_rq, se);
主要看下put_prev_task:
put_prev_task
->prev->sched_class->put_prev_task(rq, prev)
->put_prev_task_fair
->put_prev_entity
-> if (prev->on_rq) { //前一个任务的调度实体on_rq不为0?
update_stats_wait_start(cfs_rq, prev);
/* Put 'current' back into the tree. */
__enqueue_entity(cfs_rq, prev); //重新加入cfs运行队列
/* in !on_rq case, update occurred at dequeue */
update_load_avg(cfs_rq, prev, 0);
}
cfs_rq->curr = NULL; //设置cfs运行队列的curr为NULL
put_prev_task所做的主要工作就是将前一个任务从cfs运行队列中删除,在这里就是通过调用__enqueue_entity将对应的调度实体重新加入cfs队列的红黑树,但是对于即将睡眠的任务之前在主调度器中通过deactivate_task将prev->on_rq设置为0了,所以对于即将睡眠的任务来说,它对应的调度实体不会在重新加入cfs运行队列的红黑树。
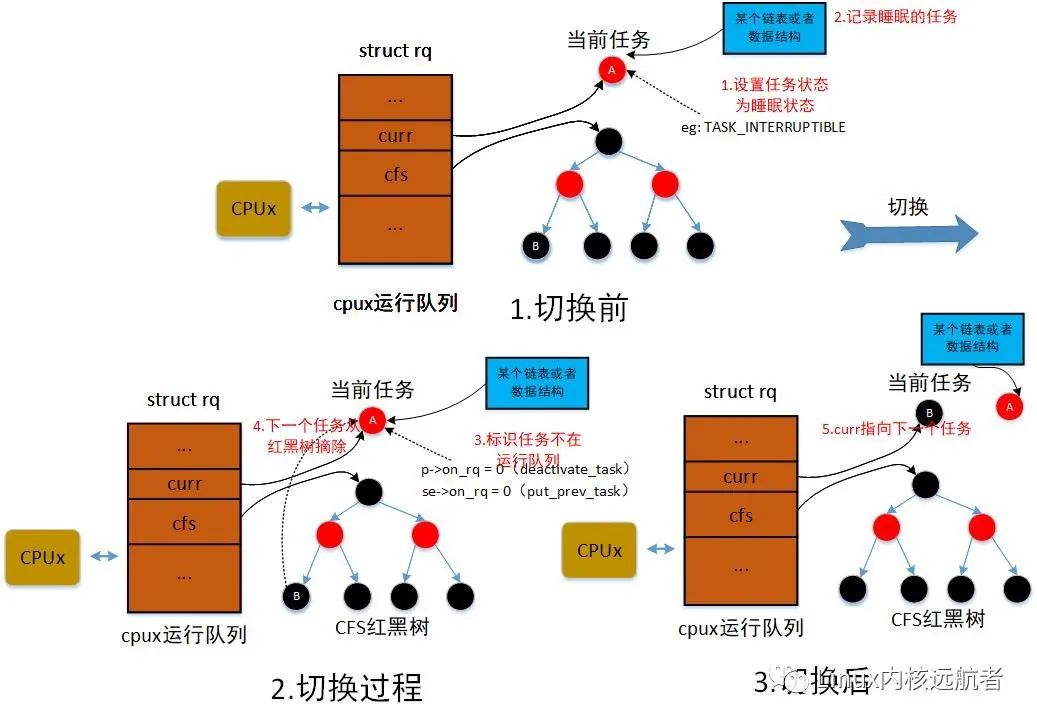
下面来看下睡眠图示:

















 418
418

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









