






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
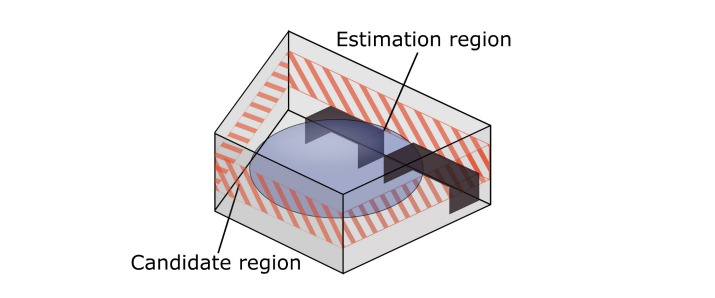
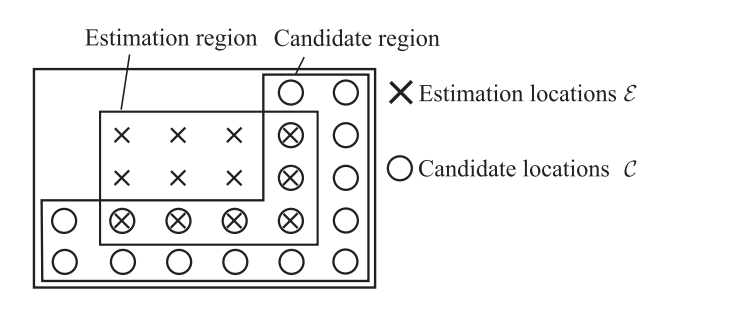
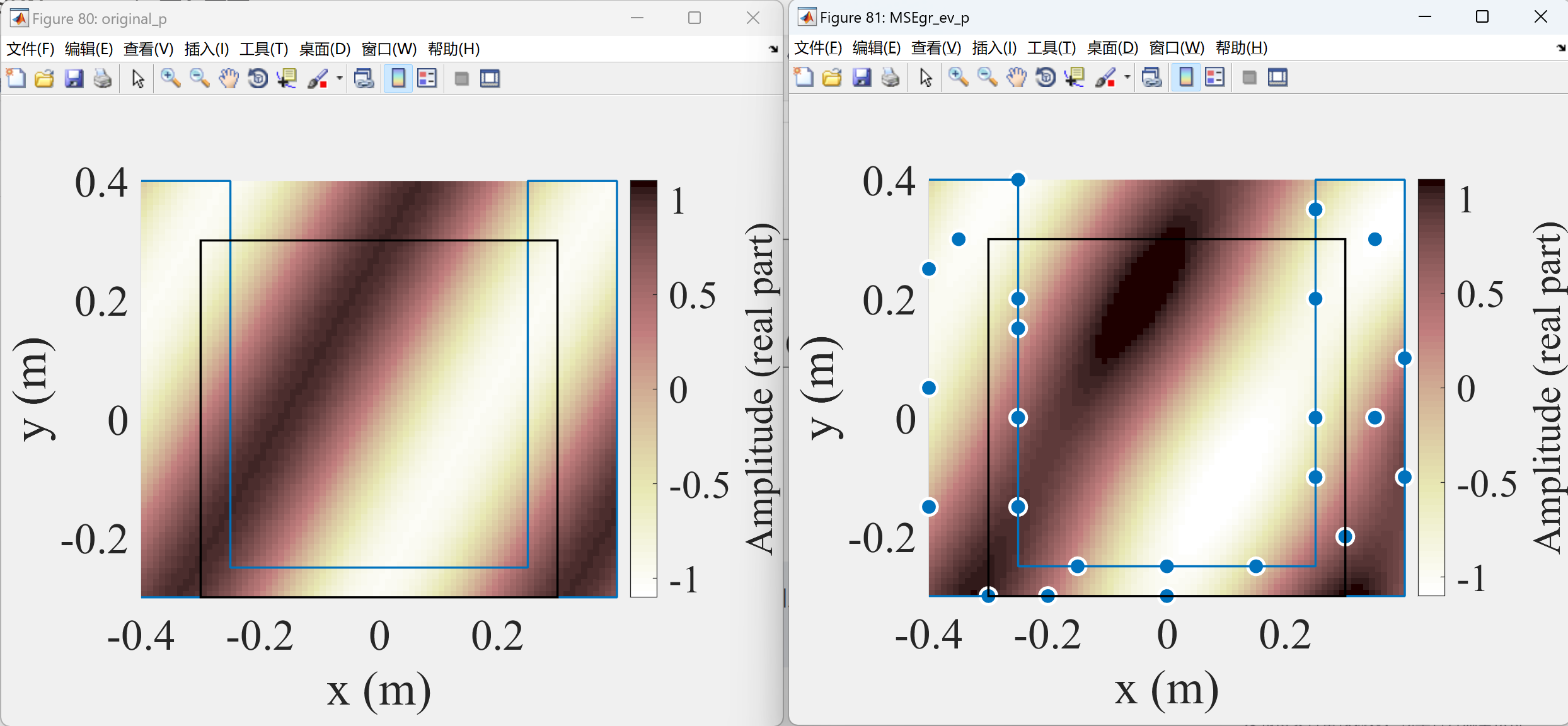
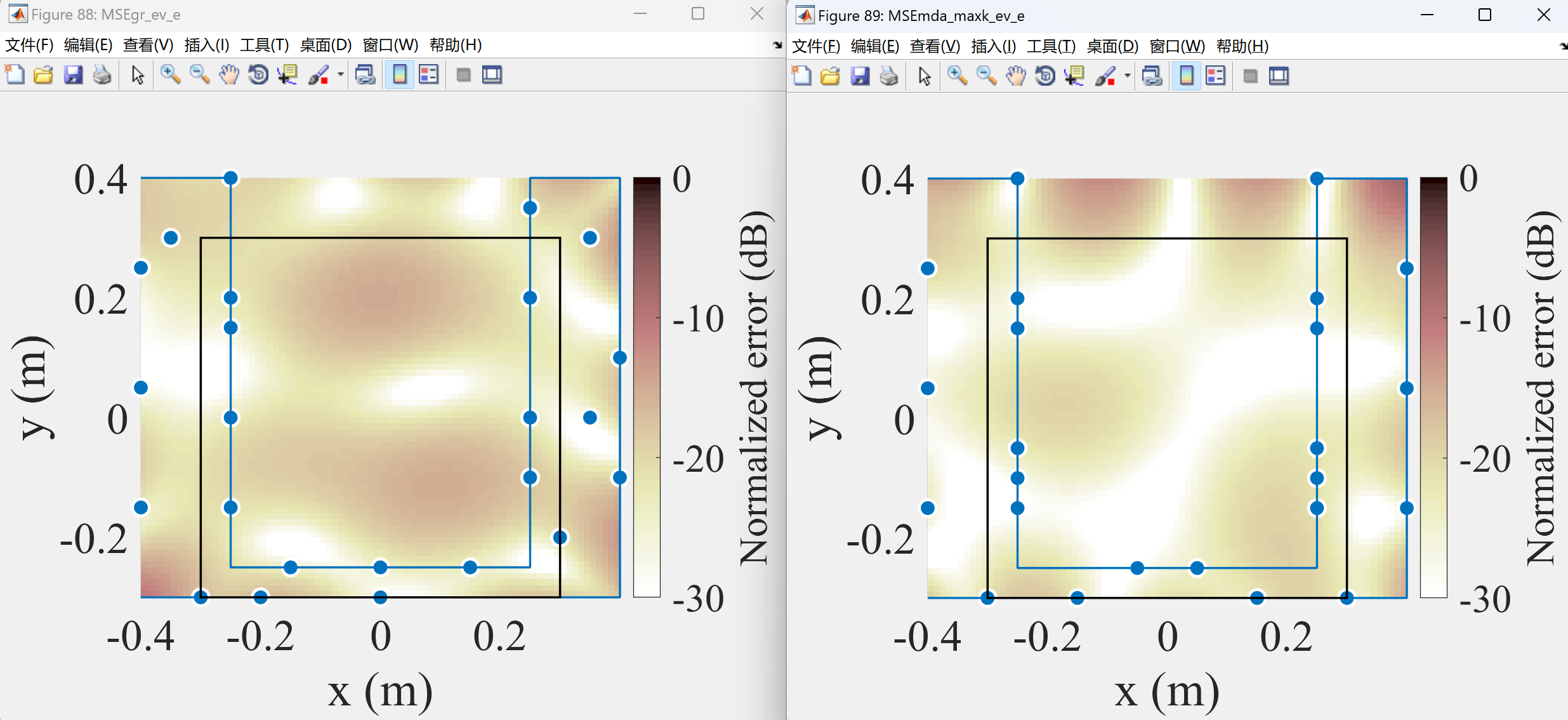
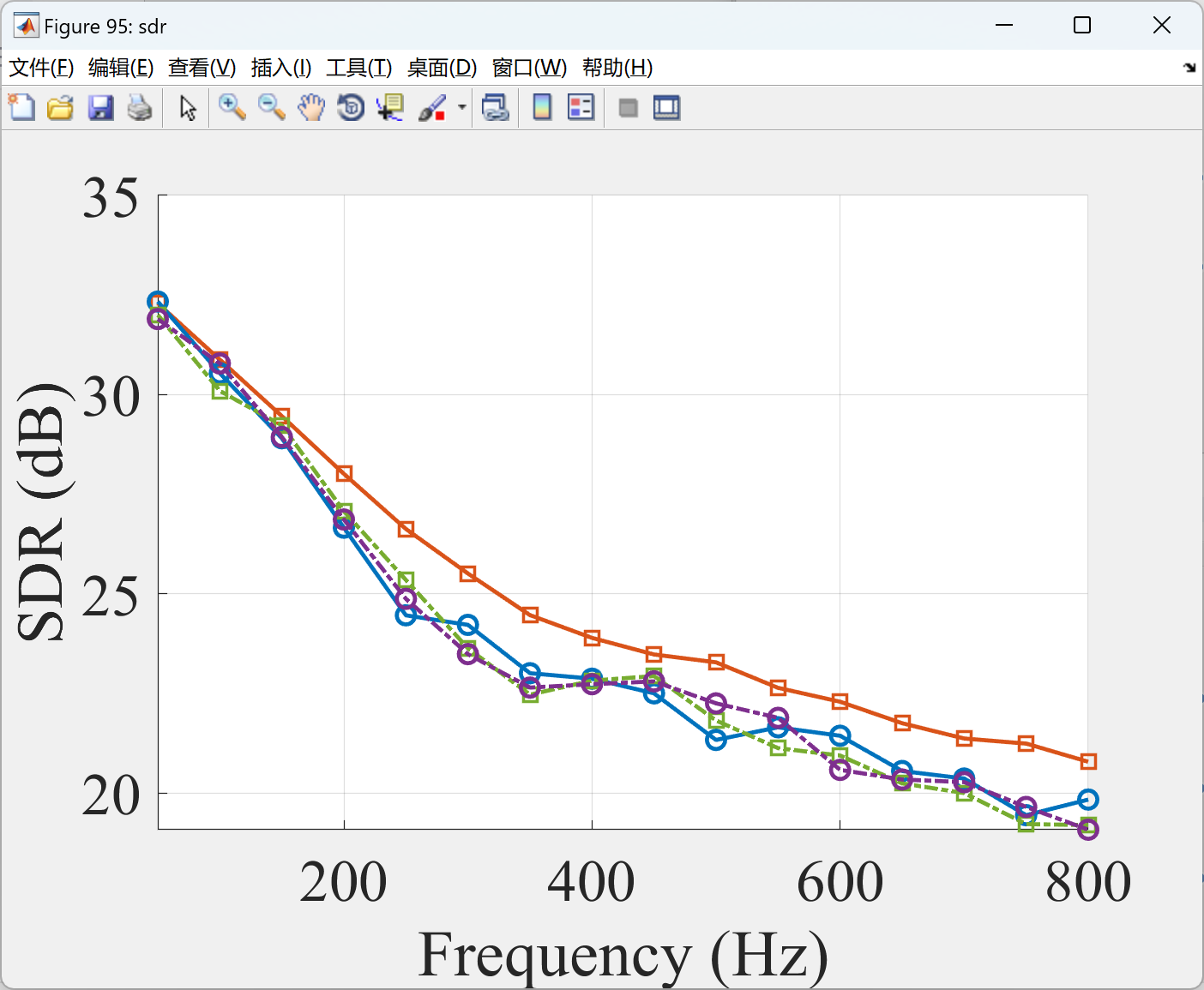
本文提出了基于高斯过程的场估计传感器布置方法。一般来说,传感器布置方法通过从预定义的候选位置中选择适当的位置来确定布置位置。已经提出了许多用于选择的标准,这些标准评估了候选位置处场的布置质量。这意味着这些传感器布置方法旨在找到能够准确估计候选位置处场的位置。然而,在实际情况下,候选传感器布置区域可能与场估计的目标区域不同。为了使传感器布置方法适用于这种情况,本文提出了两种基于均方误差和条件熵的传感器布置方法,可应用于传感器布置区域受任意限制的情况。在制定传感器布置问题后,导出了两种近似算法:贪婪算法和基于凸松弛的算法。还说明了所提方法在声场估计中的应用,并通过数值实验验证了其有效性。
估算或插值物理场,比如温度 [1],[2],声场 [3]–[5],和污染 [6],从传感器测量的数值中是一个具有许多应用的重要问题。例如,声场估计是一个在许多情况下使用的问题,例如使用扬声器或耳机重现声场,可视化和主动噪声控制。为了估算场,多个传感器被分布在目标区域中,并且整个场是根据它们的测量来估计的。
由于物理或经济约束,可以放置的传感器数量通常受到限制。在这种情况下,传感器的位置对估算精度有很大影响。因此,场估计中的一个主要问题是如何确定分布传感器的布置。为了解决这个问题,已经进行了大量关于传感器布置方法的研究。例如,在声学问题的背景下,传感器布置方法已经应用于声场估计 [7],麦克风阵列设计 [8],和声场控制 [9],[10]等问题。在大多数方法中,首先将感兴趣的区域离散化,然后从这些离散化的位置确定适当的传感器位置,直到达到限定数量。文献中提出了许多选择位置的标准,这些标准基于观测模型,例如高斯过程 (GPs) [11]–[13] 和有限维线性逆问题 [14]–[16]。尽管有各种各样的标准,但大多数评估离散化位置处的场,这些位置也用作候选传感器位置。详细文章见第4部分。
📚2 运行结果
部分代码:
%mic vs cost
for kk = 1:prm.freq_len
figure();
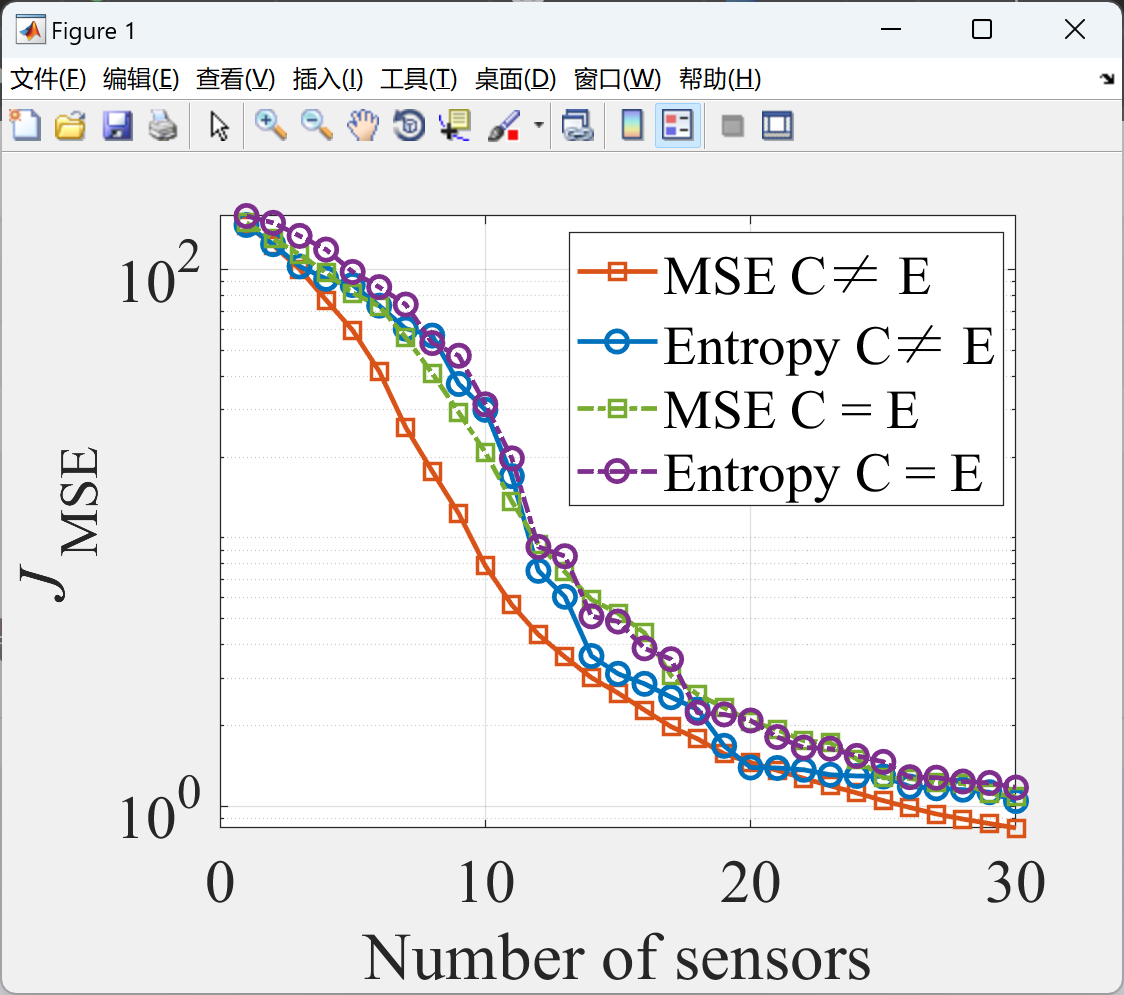
semilogy(MSEevcost_Aoptgr_ev(kk,:),'s-','Color', red, 'MarkerSize', Msize, 'DisplayName', 'MSE C\neq E');
hold on;
semilogy(MSEevcost_Doptgr_ev(kk,:),'o-','Color', blue, 'MarkerSize', Msize, 'DisplayName', 'Entropy C\neq E');
semilogy(MSEevcost_Aoptgr_cd(kk,:),'s-.','Color', green, 'MarkerSize', Msize, 'DisplayName', 'MSE C = E');
semilogy(MSEevcost_Doptgr_cd(kk,:),'o-.','Color', purple, 'MarkerSize', Msize, 'DisplayName', 'Entropy C = E');
hold off;
grid on;
xlabel('Number of sensors'); ylabel('\sl{J}_{\rm MSE}');
legend('Location','best');
figname = sprintf('%s/MSEcost_f%d.png',dir_name, prm.freq(kk));
saveas(gcf, figname);
figure();
hold on;
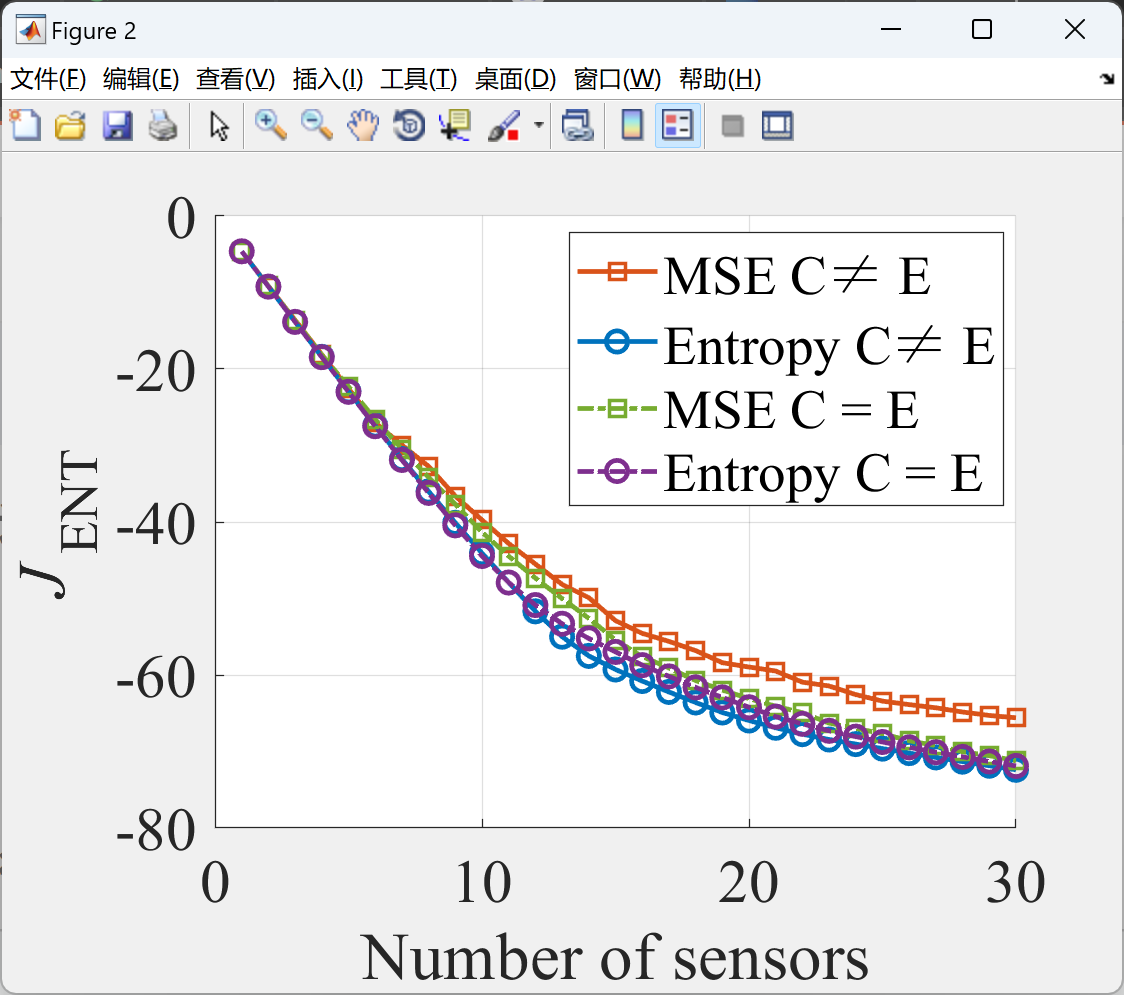
plot(ENTevcost_Aoptgr_ev(kk,:),'s-','Color', red, 'MarkerSize', Msize, 'DisplayName', 'MSE C\neq E');
plot(ENTevcost_Doptgr_ev(kk,:),'o-','Color', blue, 'MarkerSize', Msize, 'DisplayName', 'Entropy C\neq E');
plot(ENTevcost_Aoptgr_cd(kk,:),'s-.','Color', green, 'MarkerSize', Msize, 'DisplayName', 'MSE C = E');
plot(ENTevcost_Doptgr_cd(kk,:),'o-.','Color', purple, 'MarkerSize', Msize, 'DisplayName', 'Entropy C = E');
hold off;
grid on;
xlabel('Number of sensors'); ylabel('\sl{J}_{\rm ENT}');
legend('Location','best');
figname = sprintf('%s/ENTcost_f%d.png',dir_name, prm.freq(kk));
saveas(gcf, figname);
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









