






👨🎓个人主页:研学社的博客
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
在本部分中,提供了一个设置基于状态空间模型的预测控制器的工具。
在线控制器必须在使用前进行设置。要设置状态空间MPC控制器,用户必须提供状态空间模型,由A,B,C和D矩阵表示(注意:它应该是离散时间),预测视界,P,移动视界,M和性能权重,Q和R。默认初始状态和输入设置为零。
SSMPC=MPCSETUP(A,B,C,D,P,M,Q,R,X0,U0);
从 MPC 安装程序返回的函数句柄是一个联机控制器 SSMPC。控制器通过证明两个输入来调用:电流测量、Y 和未来参考、参考。返回时,它产生最佳输入,U 表示下一步:
U = SSMPC(Y,Ref);
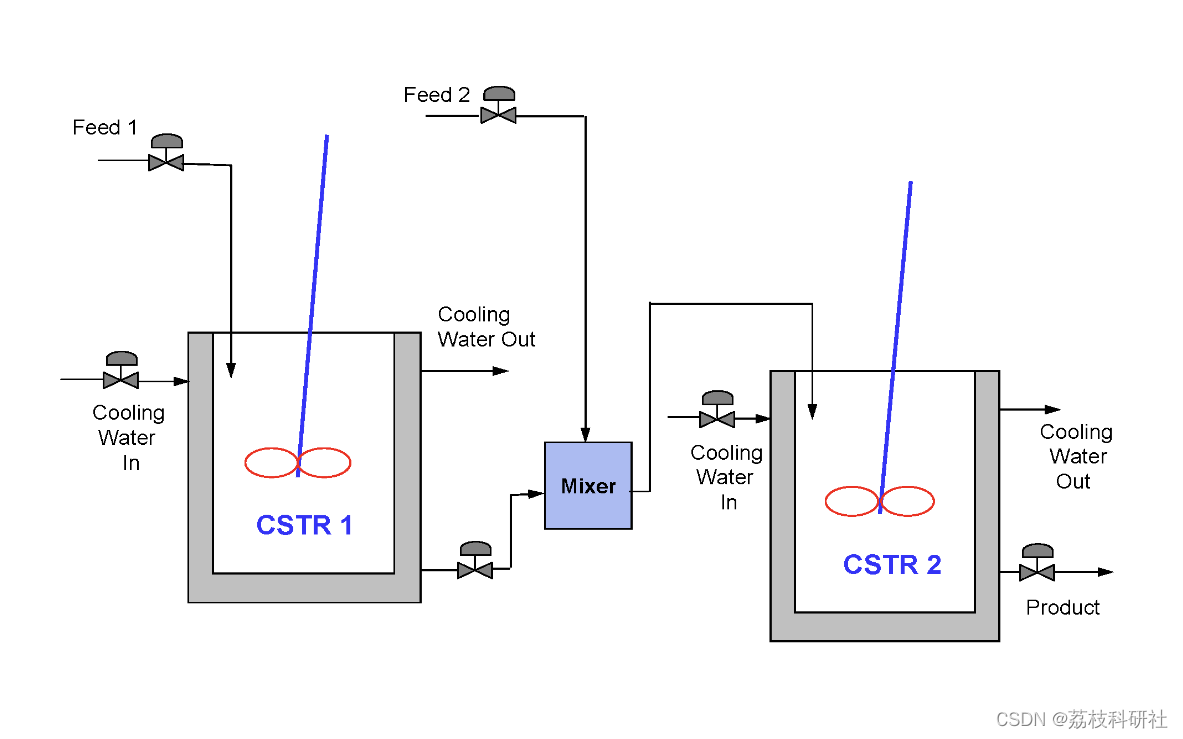
双CSTR(连续搅拌反应罐)过程如下所示。
模型预测控制(Model Predictive Control, MPC)是一种先进的控制策略,它通过反复解决有限时域内的最优化问题来计算控制输入序列,从而实现对系统未来的控制。在多变量和状态空间背景下,MPC显示出了强大的控制能力和灵活性,下面是对其在这两方面的深入研究探讨:
多变量系统控制
-
系统描述:多变量系统指的是具有多个输入和/或多个输出的控制系统。在MPC框架下,这类系统的动态通常被建模为多个相关联的状态方程,每个输出可能受到多个输入的影响,同时每个输入也会影响到多个输出。
-
目标函数:在多变量MPC中,目标函数的设计需要综合考虑所有输出变量的跟踪误差、输入变量的变动范围和能量消耗等因素,通常采用加权二次型的形式,以平衡各目标之间的矛盾。
-
约束处理:多变量系统控制往往伴随着更为复杂的约束条件,如输入变量限制、状态变量限制以及跨时间段的约束。有效处理这些约束是MPC设计的关键,常用方法包括内点法、积极集法等。
-
解耦与协调:为了简化控制问题,有时会在多变量MPC设计中尝试解耦控制策略,将一个多输入多输出(MIMO)系统转换成多个可管理的单输入单输出(SISO)子系统。另外,通过协调控制器确保整体系统性能也是研究的重点。
状态空间方法
-
系统建模:在状态空间框架下,MPC首先要求建立系统的状态空间模型,即一组微分方程或差分方程,描述系统状态随时间的变化以及状态与输入之间的关系。这通常包括状态方程和输出方程。
-
滚动优化:基于状态空间模型,MPC通过“滚动”预测来不断更新控制策略。每一步,MPC算法都会基于当前测量到的状态,预测未来一段时间内系统的状态,并根据此预测结果优化控制输入。
-
非线性系统的MPC:对于非线性系统,状态空间描述可能涉及非线性方程。在这种情况下,可以采用线性化方法(如泰勒展开)在当前操作点附近构建线性模型,或直接在非线性模型上应用非线性规划算法求解最优控制律。
-
稳定性与鲁棒性:在状态空间MPC设计中,保证闭环系统的稳定性和对模型不确定性及外部扰动的鲁棒性至关重要。这通常涉及到控制律的设计、预测模型的精度以及优化问题的约束设置。
研究趋势与挑战
当前和未来MPC在多变量和状态空间研究上的趋势包括:开发更高效的优化算法以降低计算负担,特别是在实时控制应用中;研究更高维度、强非线性系统和大规模系统的MPC策略;结合机器学习和数据驱动方法以提升模型预测精度和适应复杂动态环境;以及进一步探索MPC的分布式控制和协同控制能力,以应对物联网(IoT)和复杂网络系统的需求。
📚2 运行结果
部分代码:
%%
for k=1:N
% Process disturbances
w=Bd*(rand(2,1)-0.5)*2;
% Measurements noise
v=0.01*randn(2,1);
% actual measurement
y=C*x0+v;
% online controller
u=ssmpc(y,T(k:end,:)');
% plant update
x0=A*x0+Bu*u+w;
% save results
Y(k,:)=y';
U(k,:)=u';
end
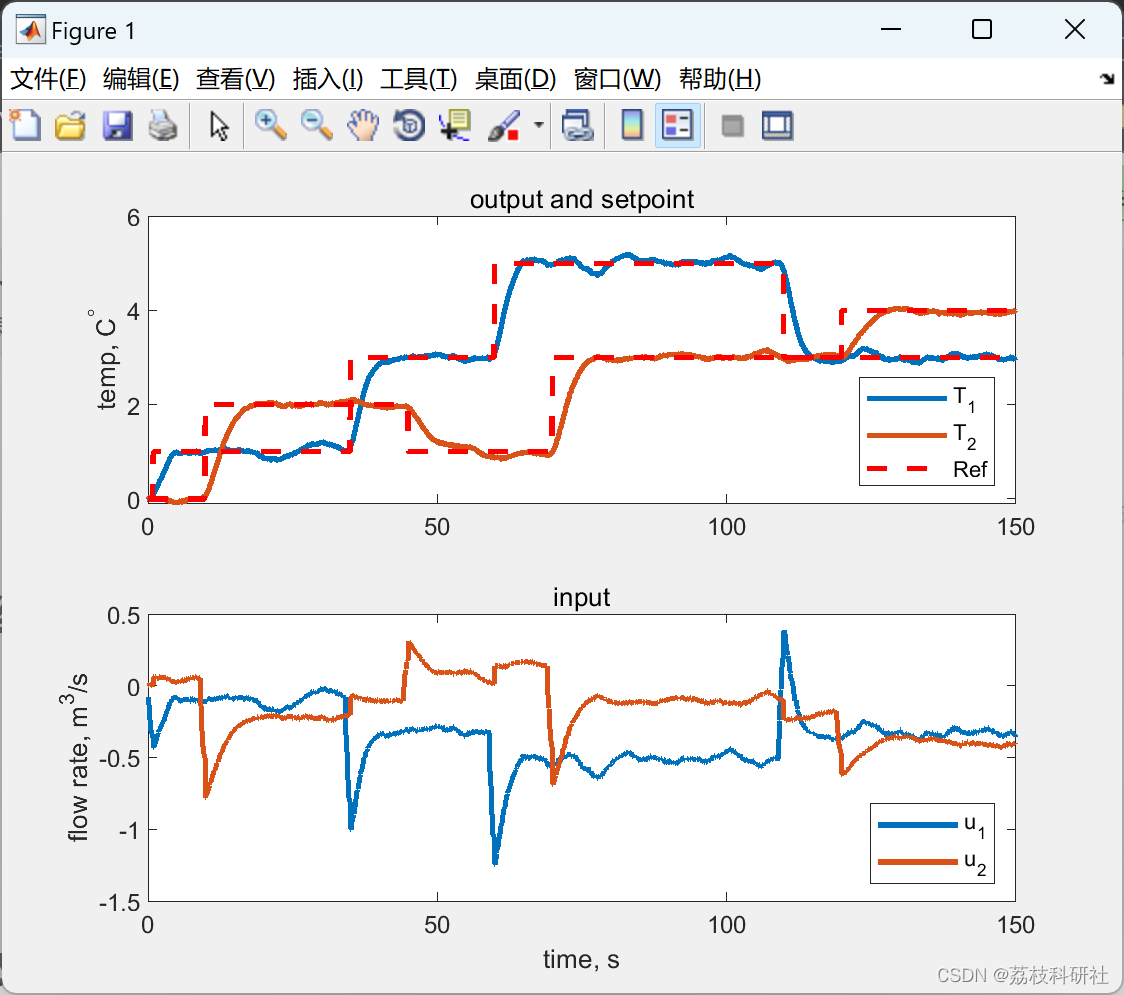
%% Results
% The simulation results are summarized in two sub-plots.
t=(0:N-1)*0.1;
subplot(211)
plot(t,Y,t,T,'r--','linewidth',2)
title('output and setpoint')
ylabel('temp, C^\circ')
legend('T_1','T_2','Ref','location','southeast')
subplot(212)
stairs(t,U,'linewidth',2)
legend('u_1','u_2','location','southeast')
title('input')
ylabel('flow rate, m^3/s')
xlabel('time, s')
🎉3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]曹永、杨志杰,“多目标过程可控性分析”,计算机与化学工程,28(2004),83--90.2.
[2] Al Seyab,RK和Cao,Y,“基于差分递归神经网络的预测控制”,计算机与化学工程
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









