







 文章描述了一个使用STM32开发板进行的项目,涉及GPIO配置、LED灯控制、Nixie管显示以及简单的按键扫描功能。程序展示了如何设置GPIO模式,驱动LED灯和Nixie管的显示,以及基本的按键输入处理。
文章描述了一个使用STM32开发板进行的项目,涉及GPIO配置、LED灯控制、Nixie管显示以及简单的按键扫描功能。程序展示了如何设置GPIO模式,驱动LED灯和Nixie管的显示,以及基本的按键输入处理。
课程设计用STM32写的小项目,十分有趣,需要的小伙伴请点赞拿走
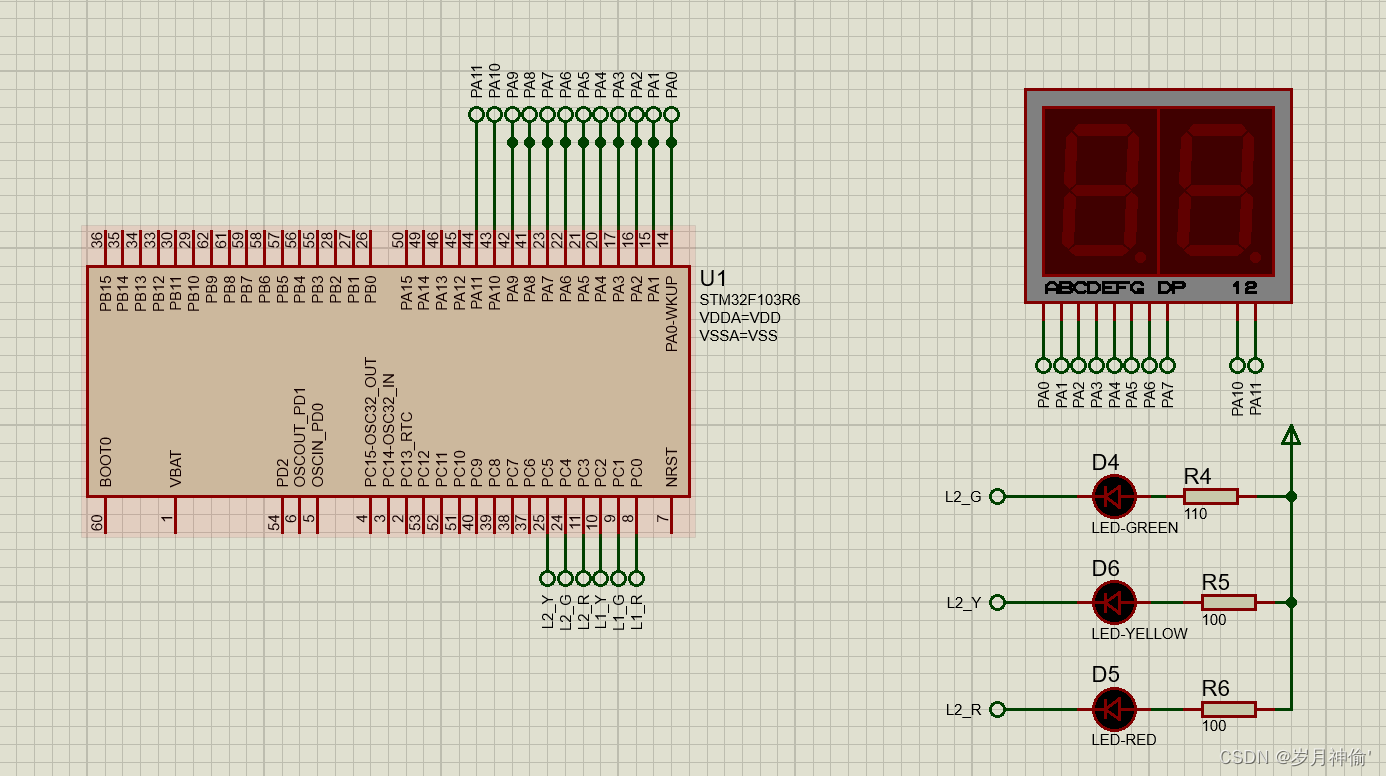
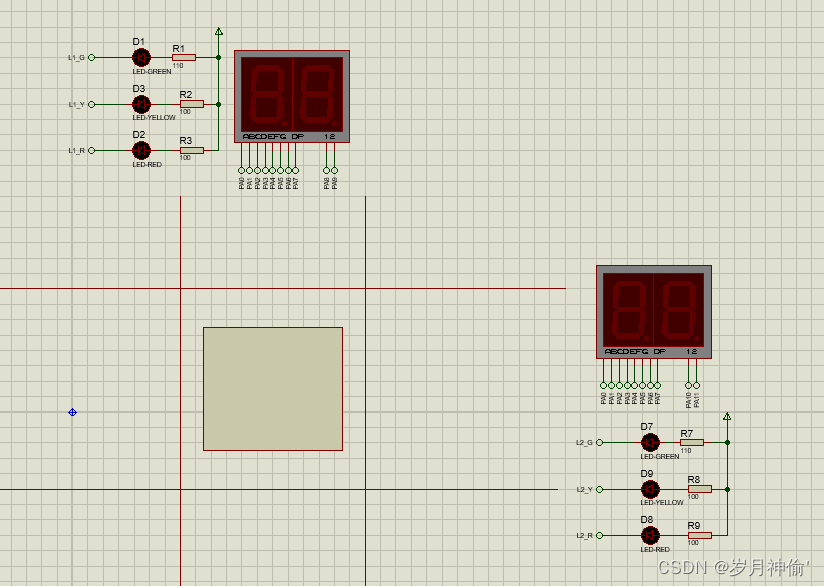
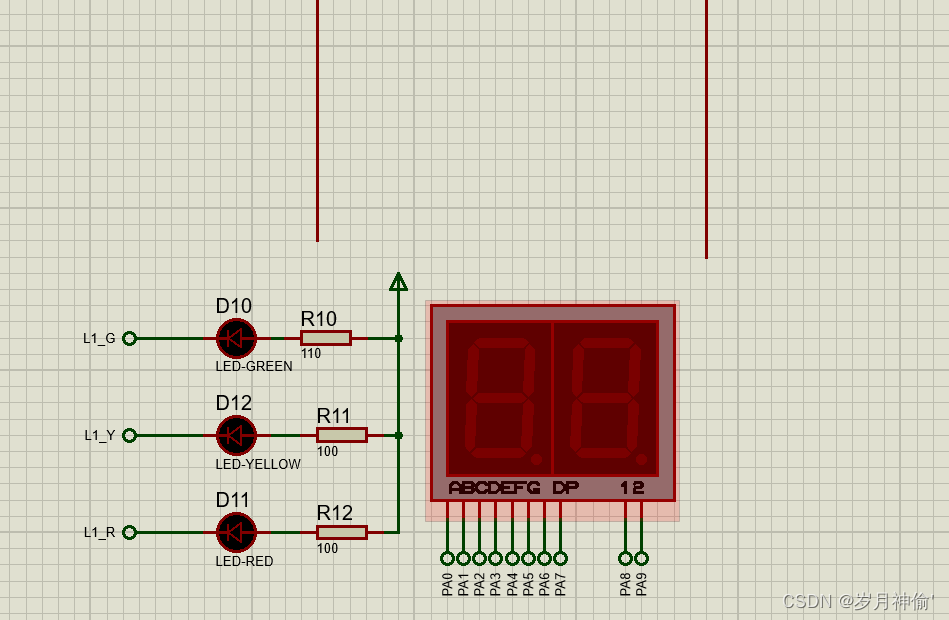
原理图
程序代码:
#include "stm32f10x.h"
void GPIO_Config(void);
void delay(u32 d){
u32 i=0;
u32 n=0;
for(i=0;i<d;i++)
for(n=0;n<800;n++);
}
u8 key_scan(){
if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_9)==0){
return 1;
}
if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_10)==0){
return 2;
}
if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_11)==0){
return 3;
}
if(GPIO_ReadInputDataBit(GPIOC, GPIO_Pin_12)==0){
return 4;
}
if(GPIO_R 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









