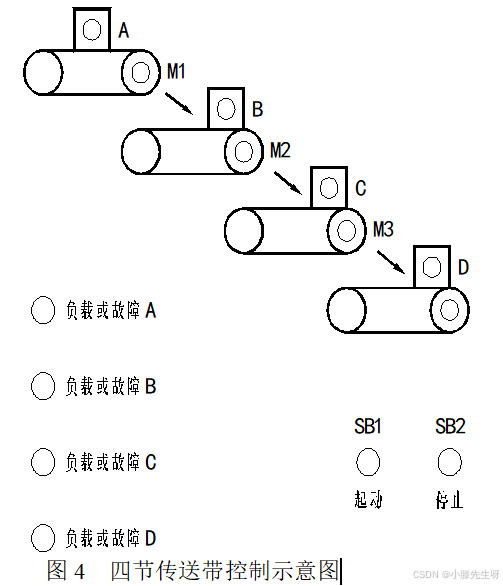
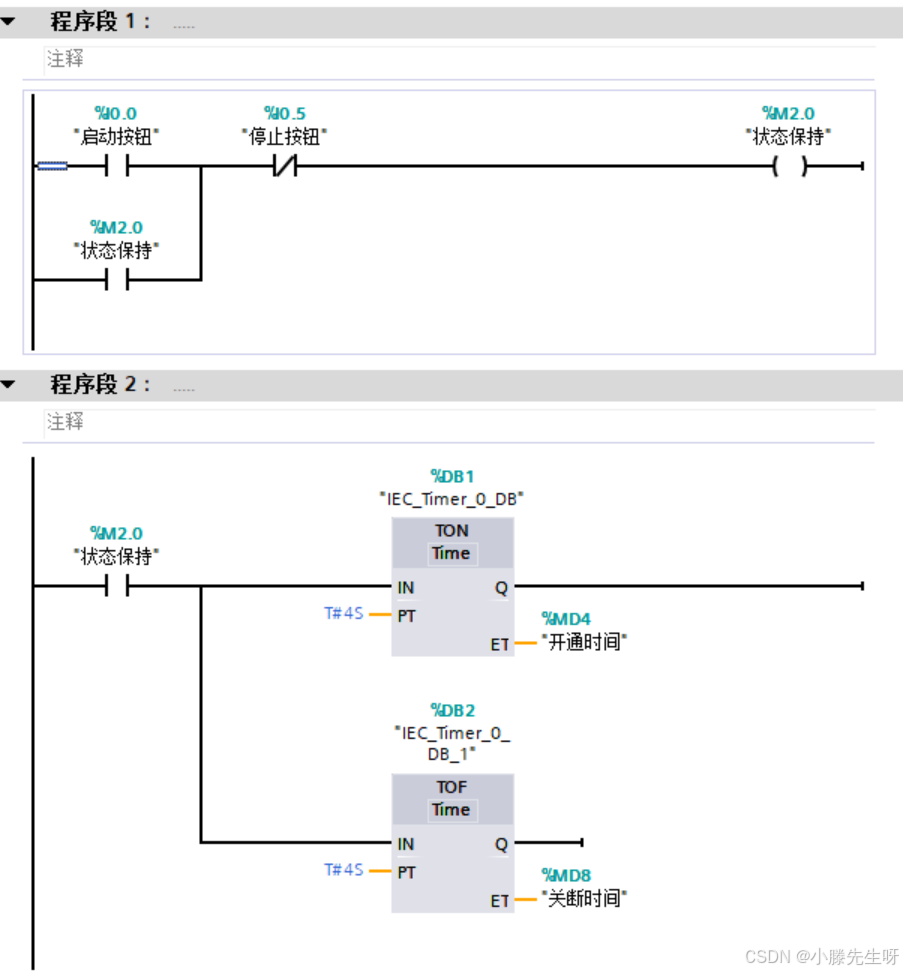
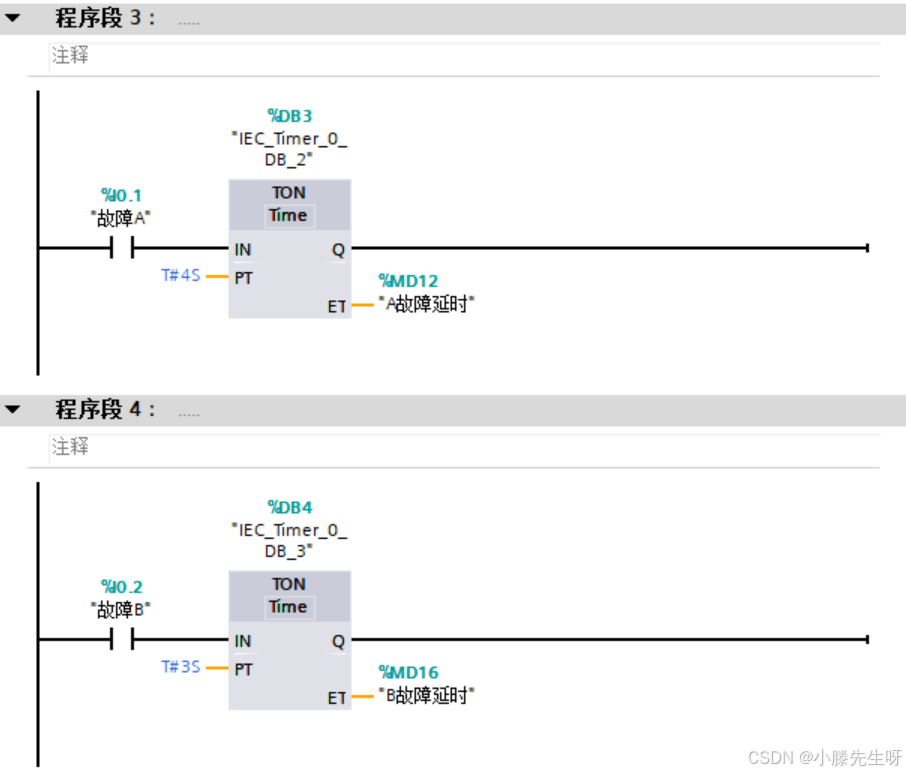
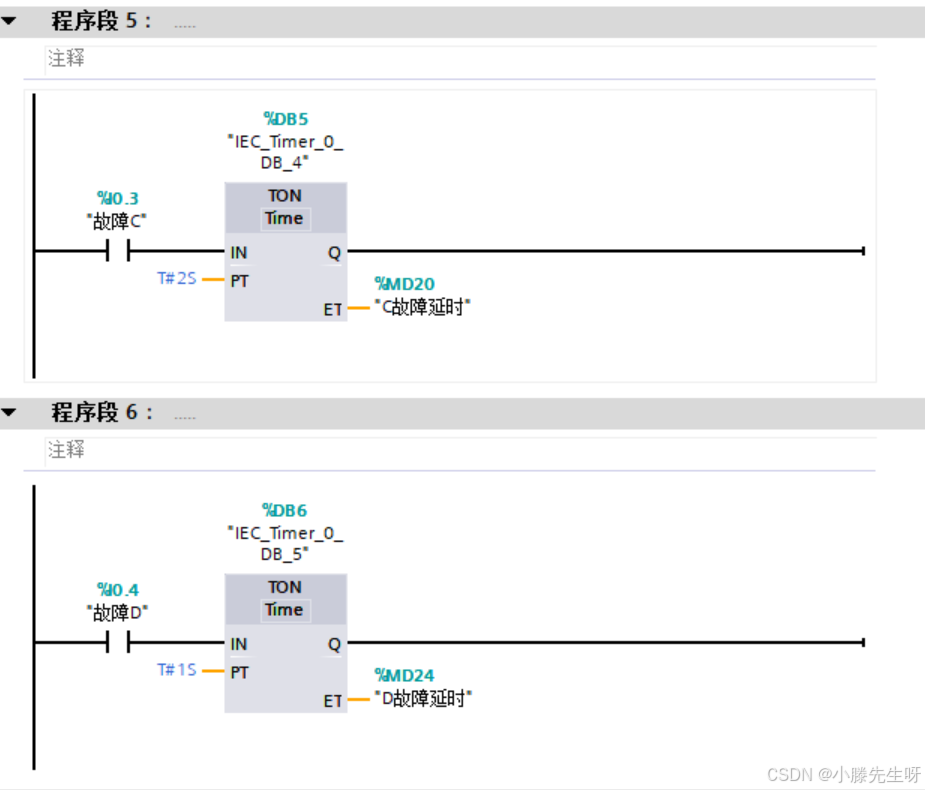
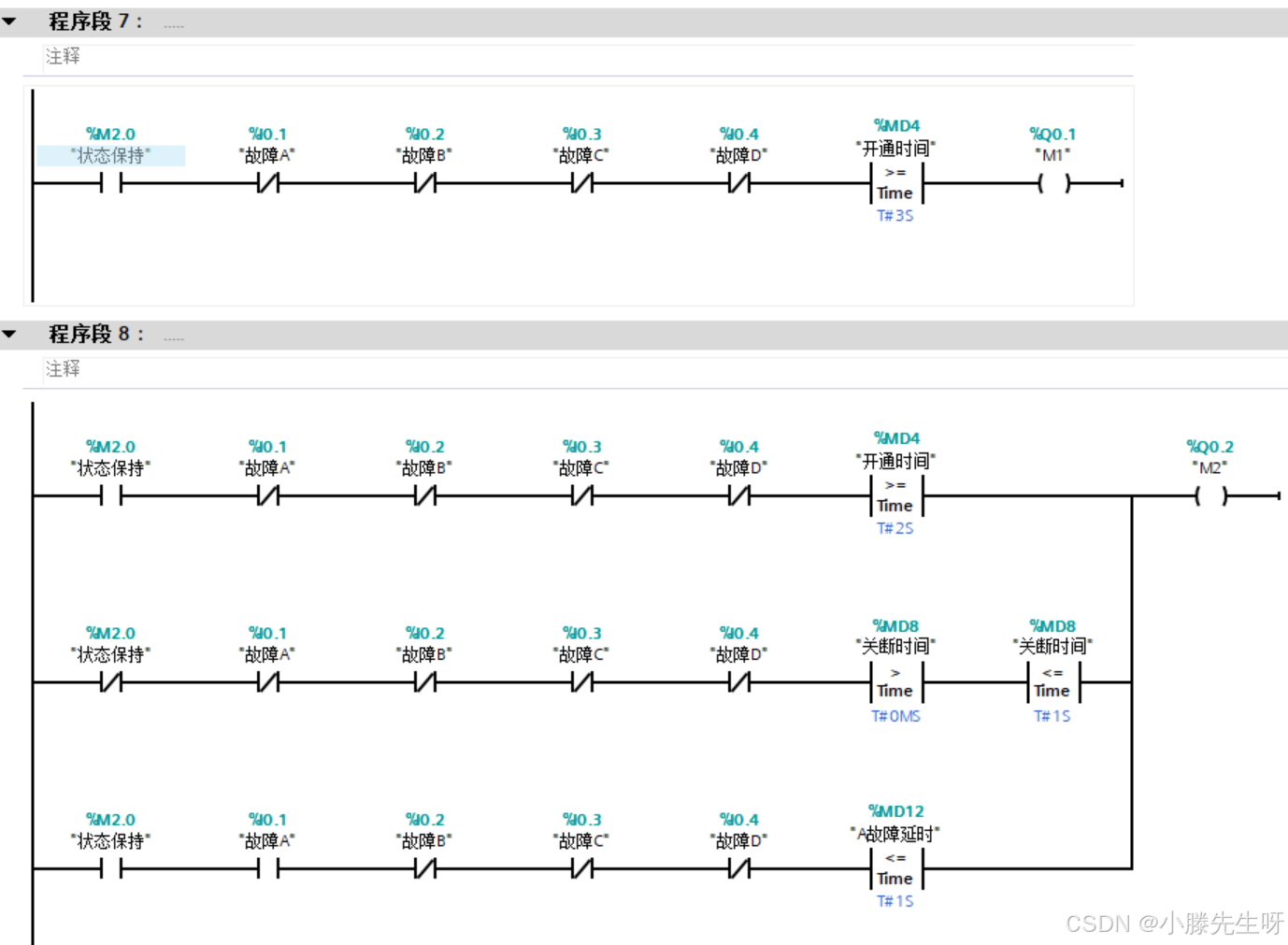
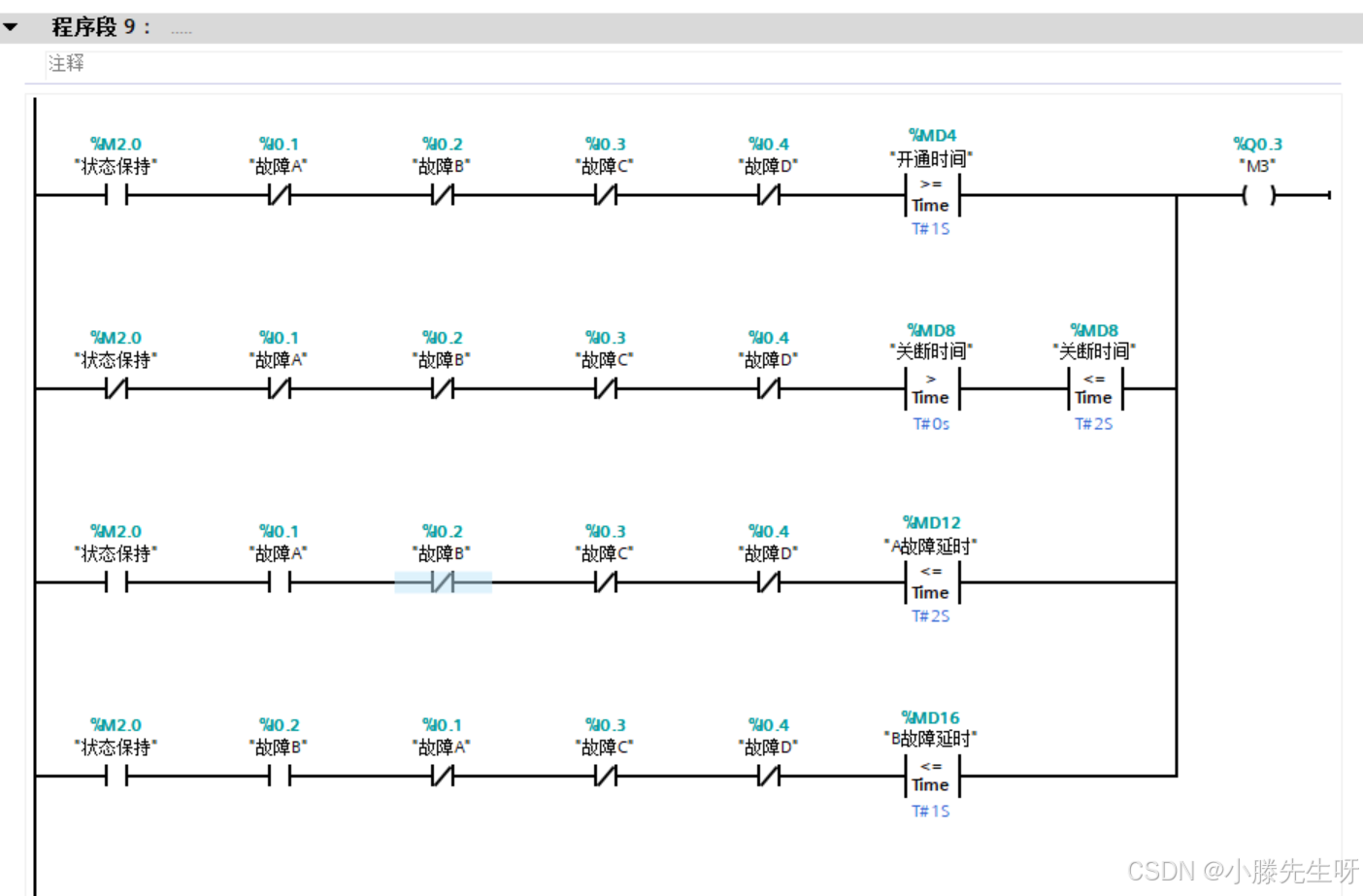
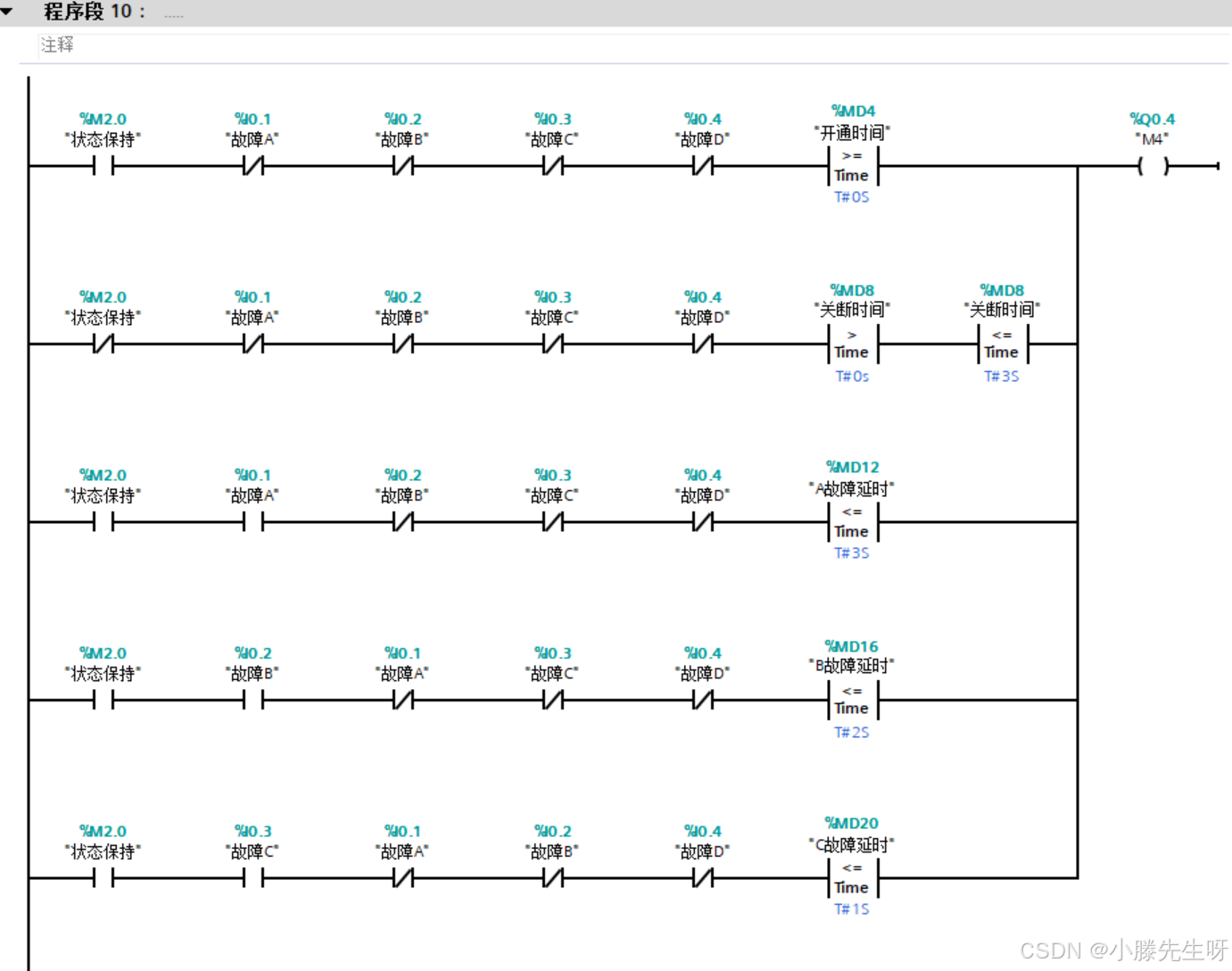
实验四 四节传送带模拟控制 一、实验目的 用PLC构成四节传送带控制系统 二、实验内容 控制要求 起动后,先起动最末的皮带机,1s后再依次起动其它的皮带机;停止时,先停止最初的皮带机,1s后再依次停止其它的皮带机;当某条皮带机发生故障时,该机及前面的应立即停止,以后的每隔1s顺序停止。 2.I/O分配 输入 输出 起动按钮:I0.0 M1:Q0.1 停止按钮:I0.5 M2:Q0.2 负载或故障A:I0.1 M3:Q0.3 负载或故障B:I0.2 M4:Q0.4 负载或故障C:I0.3 负载或故障D:I0.4 3.按图所示的梯形图输入程序。 4.实验程序
























 2526
2526

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






