






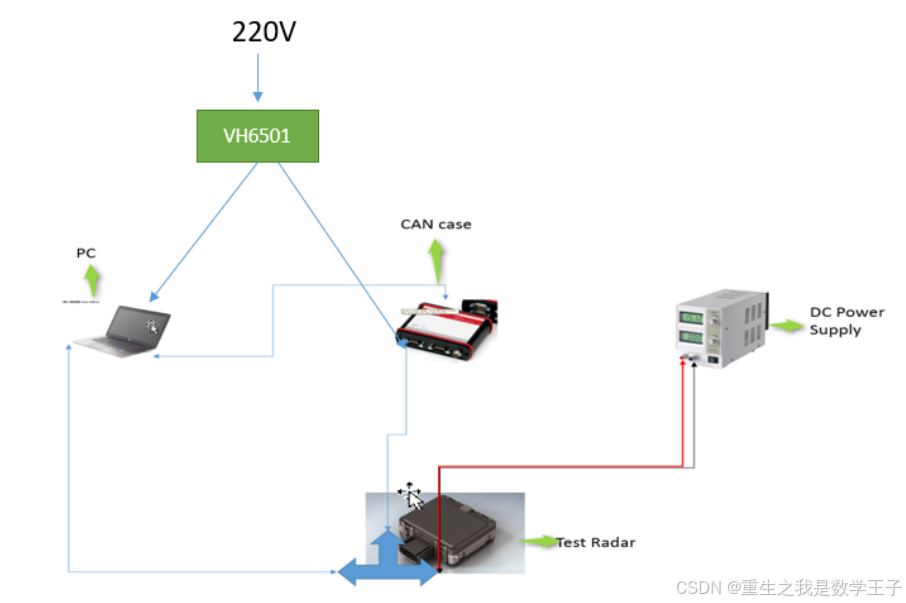
Test Environment:
1. CAN Disturbance Interface : VH6501
2. CAN case & 上位机软件 CANoe
3. Corner Radar
4. DC Power Supply
5. PC
接线图如下(注: 雷达需要切到右后角):
(注释:切角使用右后雷达的原因:该项目车型目前使用前雷达和双后雷达。B家所有雷达基本上右边为主雷达,左边为从雷达,主雷达才有公Can报文。)
首先验证CANoe可以正常接收到雷达发出的报文。
(注:查看是否通讯正常,检查Tx和Rx)
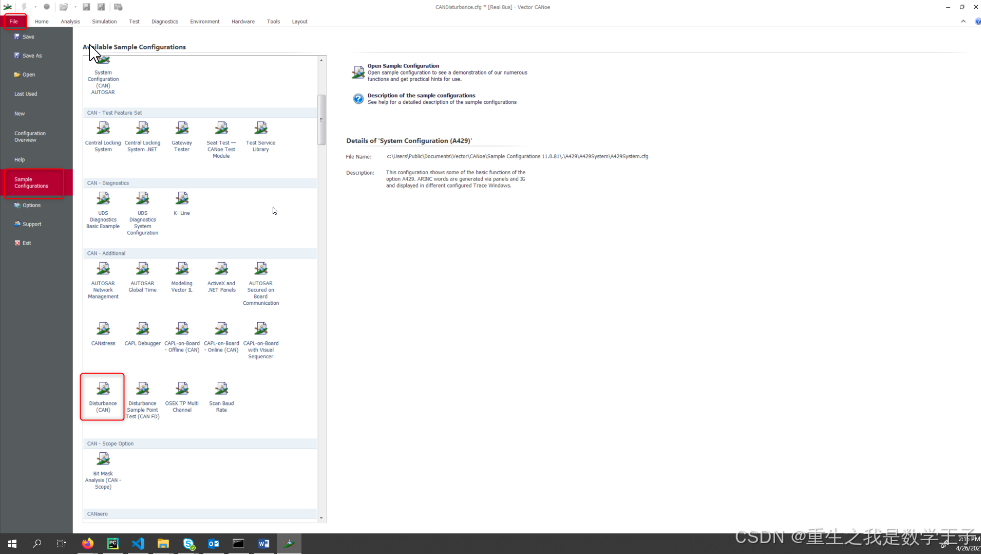
Step-1: 打开Disturbance (CAN) 的DEMO
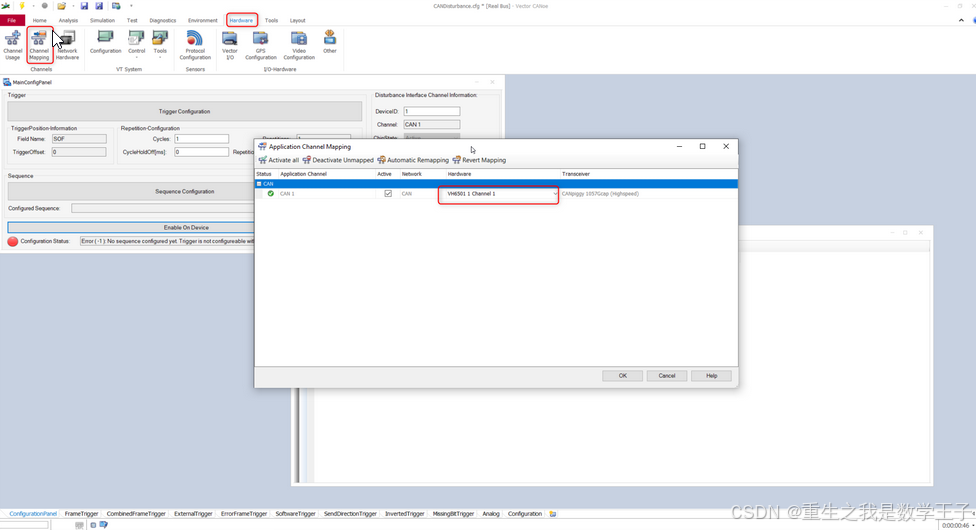
Step-2: Channel Mapping 配置VH6501
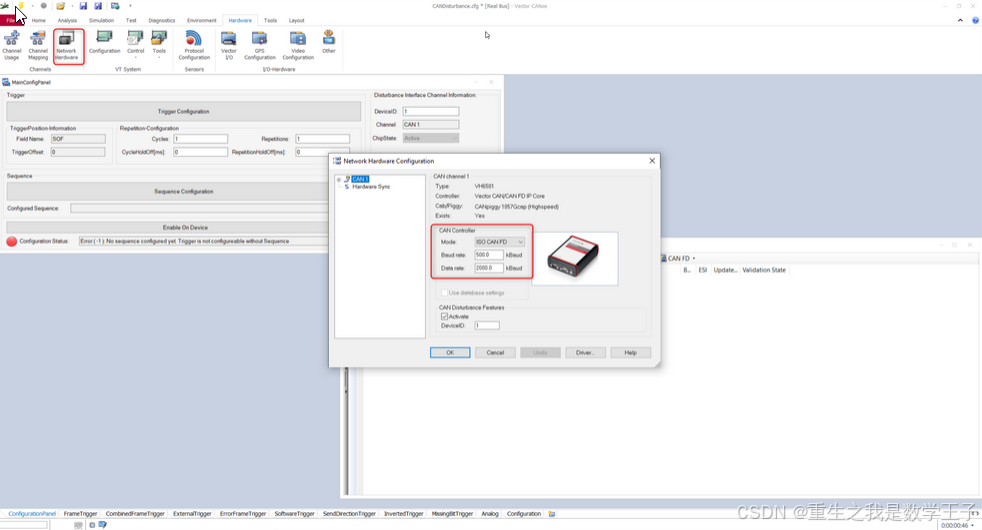
Step-3: Network Hardware 配置 mode为CANFD,并设置波特率和采样点。
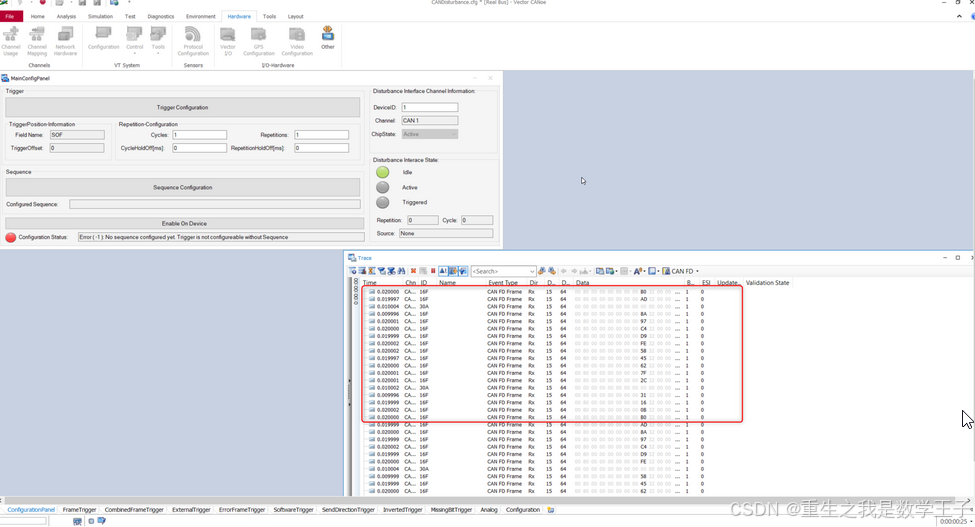
Step-4: 此时点击start运行软件后就会看到雷达不断的有报文发出来。
干扰雷达发出的报文。
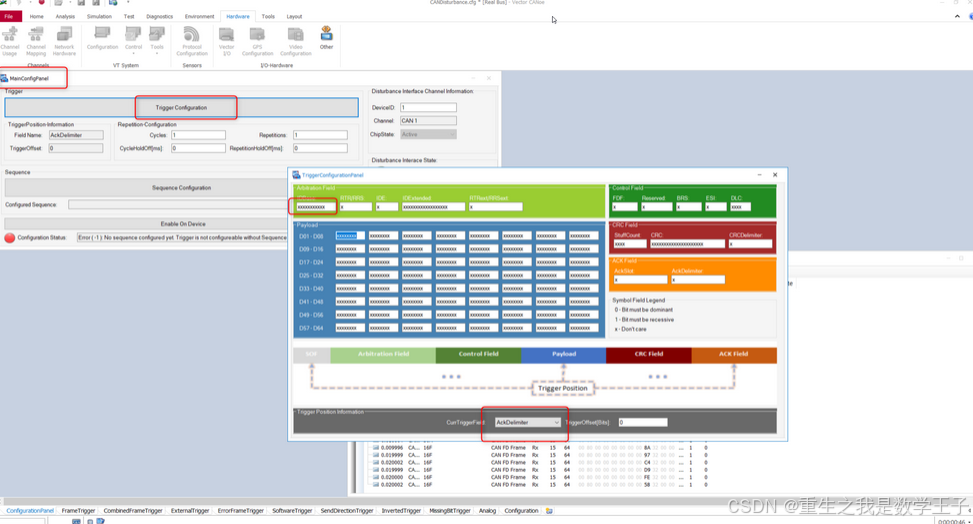
Step-5: 点击Trigger Configuration打开配置面板TriggerConfigurationPanel。
CAN ID一般由11个bit组成,可以针对特定帧触发busoff,也可以任意帧。如果雷达不需要唤醒,可以干扰任意帧,在IDBase填入11个x即可;触发位置选择AckDelimiter。如果雷达需要唤醒,则可以找一个雷达发出的报文ID,转换成11位bit, 触发位置同样选择AckDelimiter。
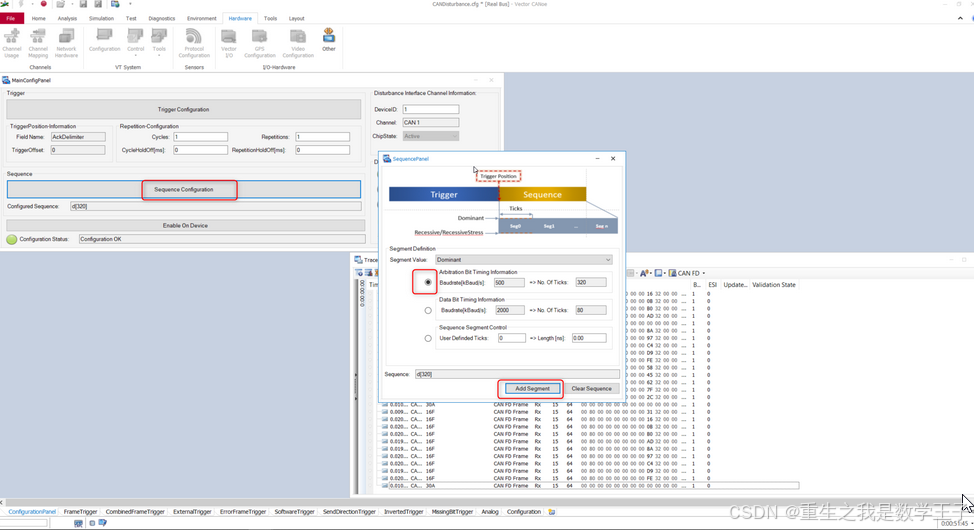
Step-6: 点击Sequence Configuration打开配置面板SequencePanel,配置显性/隐性干扰。
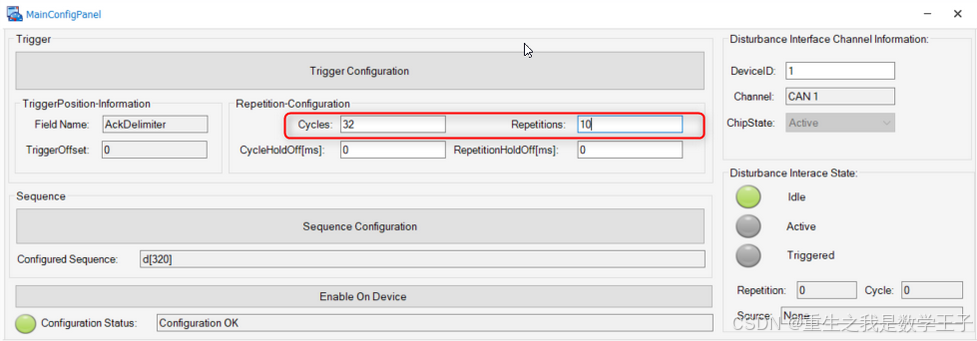
Step-7: 设置干扰次数和循环次数
根据CAN总线规则,发送单元在输出错误标志时,TEC+8,而TEC超过255时,会进入Busoff状态。因此Cycles (一个循环干扰次数) 一般设置为32,干扰32次后会导致TEC=256,从而进入Busoff状态。主机厂会对设备提出相应的Busoff后恢复时间需求,例如:当ECU 进入Busoff 模式后,ECU 执行快恢复模式,连续n次(TBD值,不同厂商次数要求不一样)快速恢复后,ECU 进入慢恢复模式。本次测试radar的TBD值为5,因此设置Repetitions=10,验证快恢复5次后进入慢恢复模式,且之后一直处于慢恢复模式,直到干扰结束。Repetitions 代表实现几次busoff。
Step-8: 点击Enable On Device触发干扰,就可以看到一些错误帧
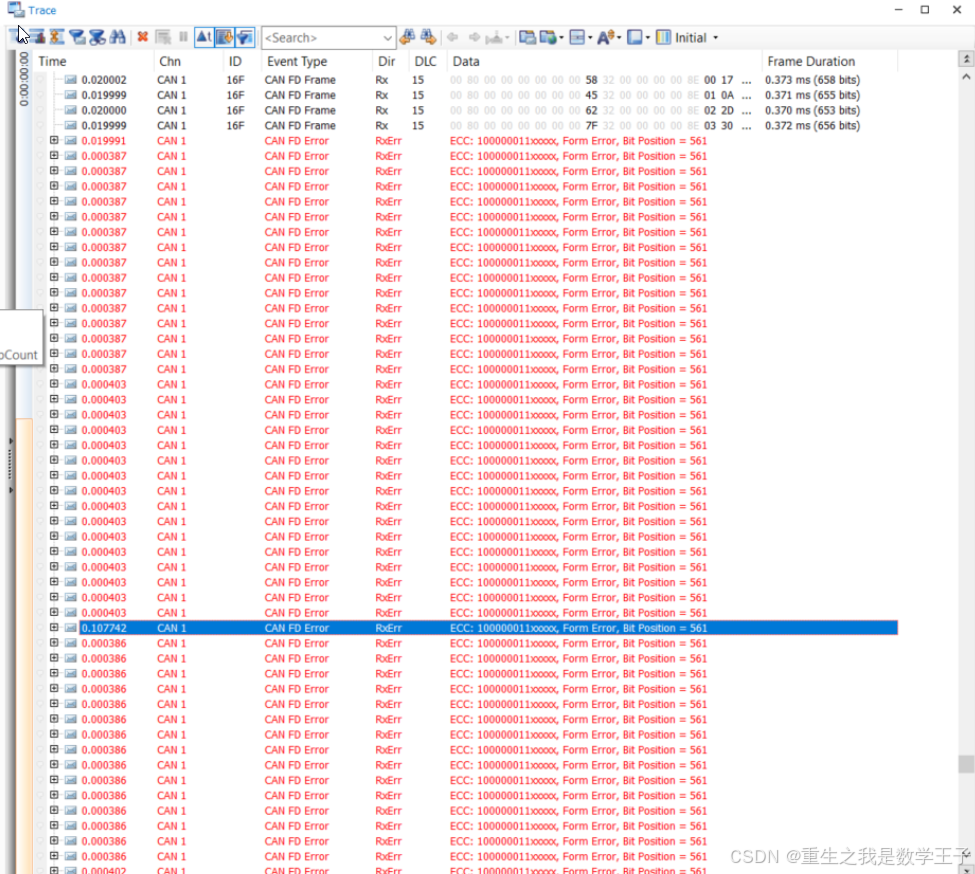
由上图可以看出,当干扰32次后,雷达再次发出报文的时间间隔约为100ms,雷达进入快恢复模式。
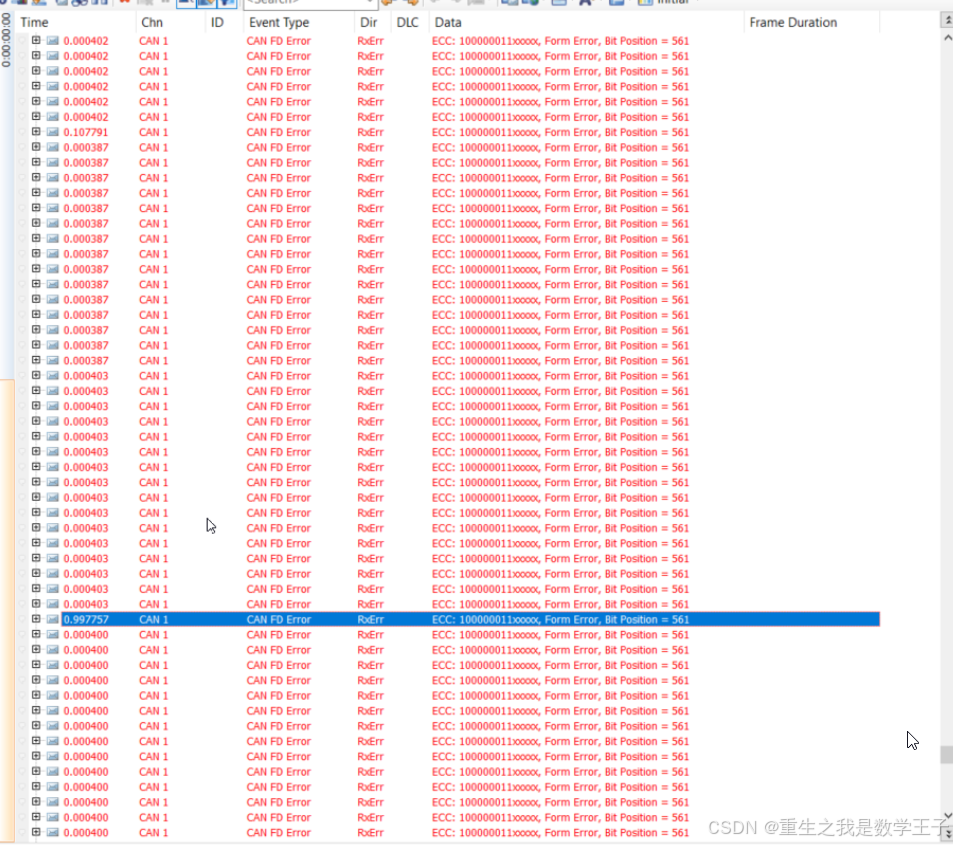
当快恢复次数满5次后,雷达进入慢恢复模式,发出报文间隔时间约为1s。
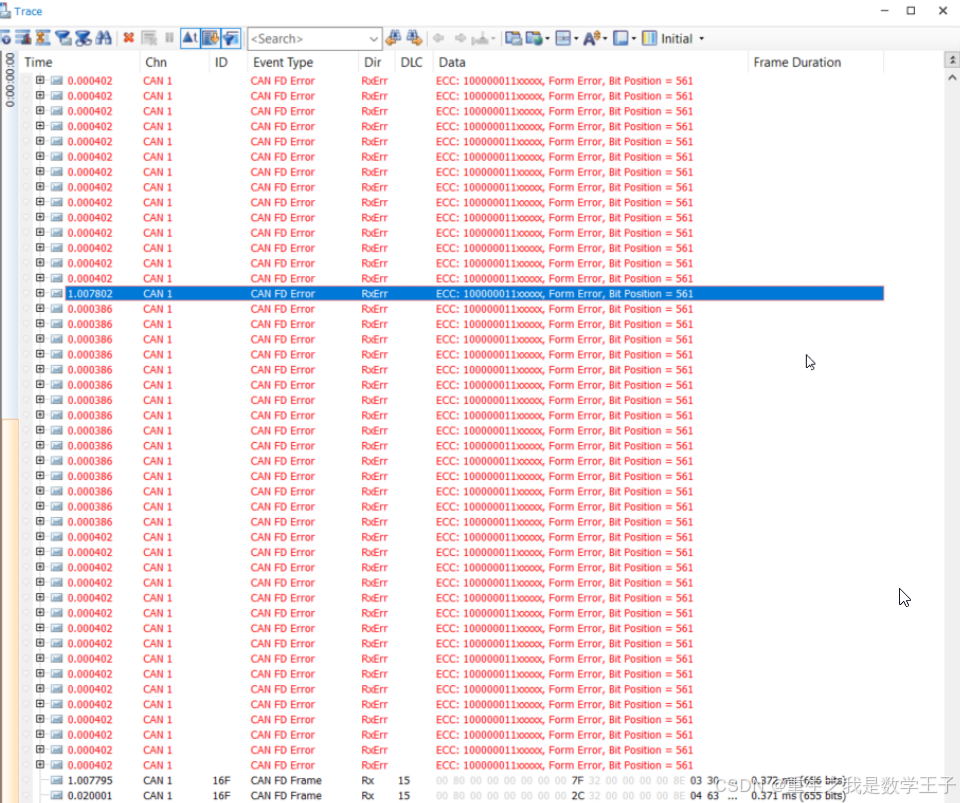
此后雷达一直处于慢恢复模式,直到干扰结束后恢复正常。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









