






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能解答你胸中升起的一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
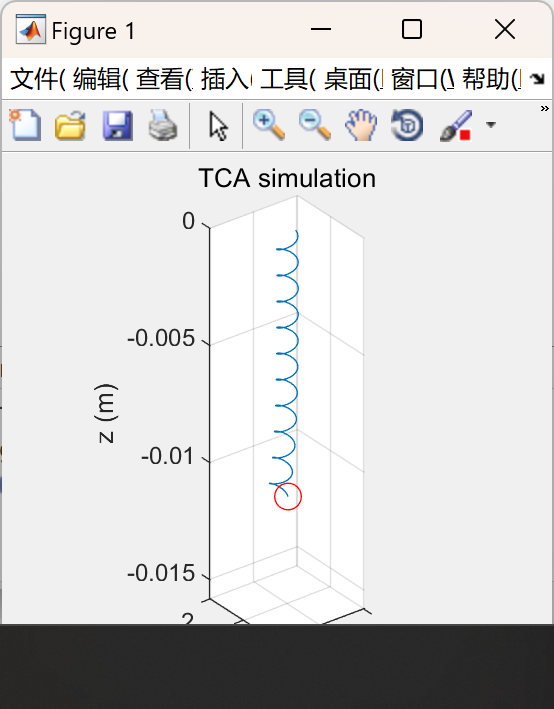
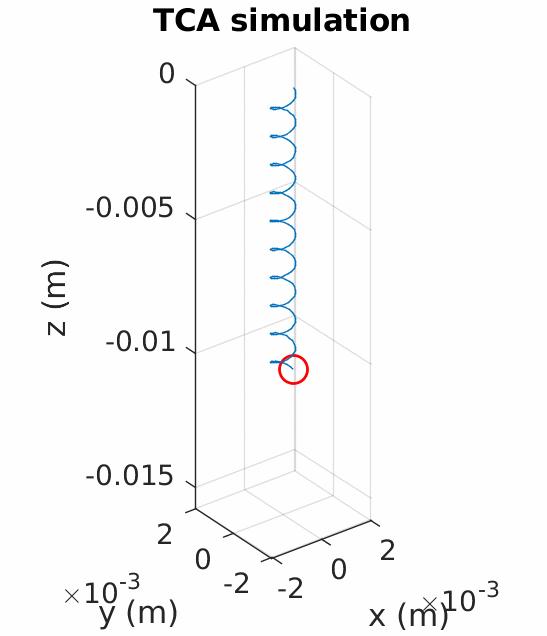
基于物理的模型,使用Cosserat杆理论对扭曲和盘绕致动器进行建模
摘要:
扭曲和卷绕致动器(TCAs)最近成为各种机器人应用中一种有前景的人造肌肉,因为它们坚固、成本低且可定制。为了更好地促进应用,为不同类型的TCA(例如,自卷曲、自由行程、锥形等)建立通用和精确的模型至关重要。尽管最近提出了几种建模方法,但现有的模型要么无法捕捉到大变形过程中的非线性,要么无法对具有非均匀几何形状的TCA进行建模。在这项工作中,我们使用Cosserat杆理论建立了一个用于模拟TCA的通用框架,该框架可以捕捉大变形的非线性,并模拟具有非均匀几何形状的TCA。此外,我们证明现有方法是通用模型的特例。通过全面的静态和动态实验来验证所提出的模型,结果表明该模型比现有的模型更准确,特别是在TCA发生较大变形的情况下。鉴于TCAs的广泛应用,我们的通用模型可以帮助更好地设计、优化和控制由不同类型的TCAs驱动的系统/机器人/设备。
📚2 运行结果
部分代码:
% This is the TCA static using constant E&G and ginores the conctat
% The input
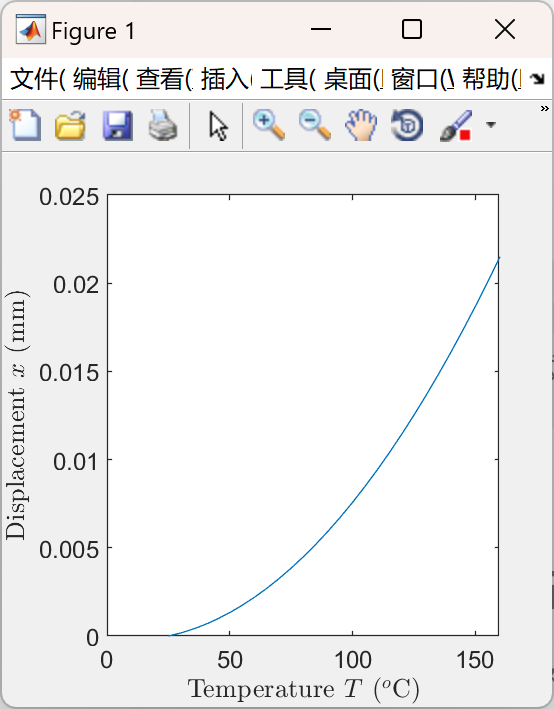
mw = 30; % the weight hanged
T = (25:5:160)'; % Temperature
% Geometry property
l_t = 175e-3; % Twistee fiber length
r_start = 0.406e-3; % TCA diameter when it is made
r_t = 0.22e-3; % twisted fiber radius
alpha_star = 22.42/180*pi; % pitch angle
n = l_t*cos(alpha_star)/(2*pi*r_start); % number of coils
l_star = l_t*sin(alpha_star); % TCA initial length
r_star = 0.406e-3; % mm
% Use 10 coils to accelerate the simulation.
N_sim = 10; N_per_coil = 20;
Ns = N_per_coil*(N_sim); % Number of nodes
N_scale = n/N_sim; l_t = l_t/N_scale;
l_star = l_star/N_scale;
theta_bar_star = 4.71e+03; % rad/m
% Material property
E = 1.1980e+09;
G = 2.2177e+08;
A_t = pi*r_t^2; I = pi*r_t^4/4; J = pi*r_t^4/2;
EI = E*I; GJ = G*J; GA = G*A_t; EA = E*A_t;
K = [EI, EI, GJ, GA, GA, EA]'; % using vector to speed up.
% Reference strains
xi_0 = [0; cos(alpha_star)^2/r_star; sin(2*alpha_star)/(2*r_star); 0; 0; 1];
%Boundary Conditions
p0 = [r_star; 0; 0];
R0 = [ -1, 0, 0;
0, sin(alpha_star), -cos(alpha_star);
0, -cos(alpha_star), -sin(alpha_star)];
h0 = rotm2quat(R0)';
Me = [0; 0; 0]; % momentum at the tip, N*mm
Fe = [0; 0; 0]; % force at the tip
% Main Simulation %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% Initialization
solinit = bvpinit(linspace(0,l_t,Ns),@init);
options = bvpset('Stats','off','RelTol',1e-5, 'NMax', 5000);
N_step = length(T);
N_f = 0; % number of frame
l = ones(N_step, 1)*l_star;
mg = mw/1000*9.8; % mw is the weight in grams
Fe_range = linspace(0,mg, 30);
N_loading = length(Fe_range);
% iterate to the equilibrium after hanging the weigth.
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
J. Sun and J. Zhao, "Physics-Based Modeling of Twisted-and-Coiled Actuators Using Cosserat Rod Theory," in IEEE Transactions on Robotics, vol. 38, no. 2, pp. 779-796, April 2022.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









