






💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
⛳️赠与读者
👨💻做科研,涉及到一个深在的思想系统,需要科研者逻辑缜密,踏实认真,但是不能只是努力,很多时候借力比努力更重要,然后还要有仰望星空的创新点和启发点。当哲学课上老师问你什么是科学,什么是电的时候,不要觉得这些问题搞笑。哲学是科学之母,哲学就是追究终极问题,寻找那些不言自明只有小孩子会问的但是你却回答不出来的问题。建议读者按目录次序逐一浏览,免得骤然跌入幽暗的迷宫找不到来时的路,它不足为你揭示全部问题的答案,但若能让人胸中升起一朵朵疑云,也未尝不会酿成晚霞斑斓的别一番景致,万一它居然给你带来了一场精神世界的苦雨,那就借机洗刷一下原来存放在那儿的“躺平”上的尘埃吧。
或许,雨过云收,神驰的天地更清朗.......🔎🔎🔎
💥1 概述
【移动机器人路径规划】基于RRT、RRTconnect、RRTstar、PRM、dijkstra、Astar、APF、DWA、GA、ACO、PSO、BFO、ABC、CSA、FA、GWO、SSA的算法移动机器人路径规划研究
以下是一份基于RRT、RRTconnect、RRTstar、PRM、Dijkstra、Astar、APF(Artificial Potential Field,人工势场法)、DWA(Dynamic Window Approach,动态窗口法)、GA(Genetic Algorithm,遗传算法)、ACO(Ant Colony Optimization,蚁群算法)、PSO(Particle Swarm Optimization,粒子群算法)、BFO(Bacterial Foraging Optimization,细菌觅食算法)、ABC(Artificial Bee Colony,人工蜂群算法)、CSA(Cuckoo Search Algorithm,布谷鸟搜索算法)、FA(Firefly Algorithm,萤火虫算法)、GWO(Grey Wolf Optimizer,灰狼优化算法)、SSA(Sparrow Search Algorithm,麻雀搜索算法)等多种算法的移动机器人路径规划研究文档的概述。
一、引言
移动机器人路径规划是机器人领域的重要研究方向,旨在找到从起点到终点的最优或次优路径。本文档将综述多种路径规划算法,包括RRT系列算法、经典图论算法、启发式搜索算法、群体智能算法等,并探讨它们在移动机器人路径规划中的应用。
二、算法概述
-
RRT(Rapidly-exploring Random Tree)算法
- 背景:为了解决概率路线图(PRM)算法的局限性而提出,适用于高维空间和复杂障碍物环境。
- 核心思想:基于随机采样,以增量的方式构建搜索树,逐步找到从起点到终点的路径。
- 优点:能够处理狭窄通道和障碍物,增量式构建搜索树,适应动态环境。
- 缺点:不保证找到最优路径,只保证概率完备性;路径可能包含许多折角,不够平滑。
-
RRT-Connect算法
- 扩展:在RRT算法的基础上引入双树生长,分别以起点和目标点为树的根节点同时扩展随机树。
- 核心思想:使用贪婪搜索方法,两棵树交替扩展,直到建立连接或满足路径规划完成的条件。
- 优点:搜索速度更快,适用于需要快速寻找可行路径的复杂环境。
-
RRT*(Rapidly-exploring Random Tree Star)算法
- 改进:RRT算法的改进版本,旨在提高路径规划的质量和效率。
- 核心思想:在构建树的过程中采用重连策略,优化路径,避免局部最优解。
- 优点:路径质量更高,对不同类型的环境和问题具有较好的适应性和鲁棒性。
-
PRM(Probabilistic Roadmap)算法
- 核心思想:将随机生成的点作为可行解,构建路线图,从而实现路径规划。
- 优点:能够处理高维空间中的路径规划问题。
- 缺点:假设机器人能够在配置空间中的任意两点之间移动,这在实际应用中可能并不成立。
-
Dijkstra算法
- 核心思想:基于图论,能够计算出所有节点到起点的最短路径。
- 优点:适用于没有数据的情况,对于小规模问题能够快速产生正确的结果。
- 缺点:计算成本相对较高,时间复杂度为O(V^2),V表示节点数量。
-
Astar算法
- 核心思想:基于启发式搜索,可以快速找到最短路径。
- 优点:在计算范围内找到最优解,平均性能高,可以通过使用启发式函数来适应不同环境。
- 缺点:需要预先知道起点和终点的位置,计算成本比BFS算法高。
-
APF(人工势场法)
- 核心思想:把机器人所处的空间看作一个势场,在遇到障碍物时会产生斥力,而在接近目标点时会受到引力,最终通过一系列物理模拟完成路径规划。
- 优点:密集下降和重力会确保目标点免于过于接近或撞上其他障碍。
- 缺点:程式代码实现具有一定的间距高估,并且经常陷入局部极小点。
-
DWA(动态窗口法)
- 核心思想:使用运动模型、传感器数据和轨迹优先级系统等多方面的因素,通过计算机预测小车未来可能到达的状态,以指导小车实现路径跟踪与避障控制。
- 优点:可用于高速环境下的自驾车驾驶。
- 缺点:具体实现时需要综合考虑车速限制、转弯特性等多方面因素,并且需要大量的数据分析和模型。
-
群体智能算法(GA、ACO、PSO、BFO、ABC、CSA、FA、GWO、SSA等)
- 核心思想:通过模拟自然界中生物群体的行为来进行优化搜索,如遗传算法中的遗传操作、蚁群算法中的信息素更新等。
- 优点:具有全局搜索能力和较强的鲁棒性,适用于复杂优化问题。
- 缺点:计算复杂度较高,收敛速度可能较慢,且参数设置对算法性能有较大影响。
三、算法比较与应用
-
算法比较
- 从搜索效率、路径质量、适用场景等方面对上述算法进行比较。
- 指出各算法的优缺点,以及在实际应用中的局限性。
-
应用实例
- 给出各算法在移动机器人路径规划中的具体应用实例,如自动驾驶、机器人导航等。
- 分析各算法在实际应用中的表现,包括路径规划效果、计算时间等。
四、结论与展望
-
结论
- 总结各算法在移动机器人路径规划中的优缺点和应用场景。
- 指出当前路径规划算法研究的发展趋势和面临的挑战。
-
展望
- 探讨未来路径规划算法的研究方向,如结合深度学习、强化学习等先进技术进行算法优化。
- 展望移动机器人路径规划技术在自动驾驶、机器人导航等领域的广泛应用前景。
📚2 运行结果
2.1 RRT
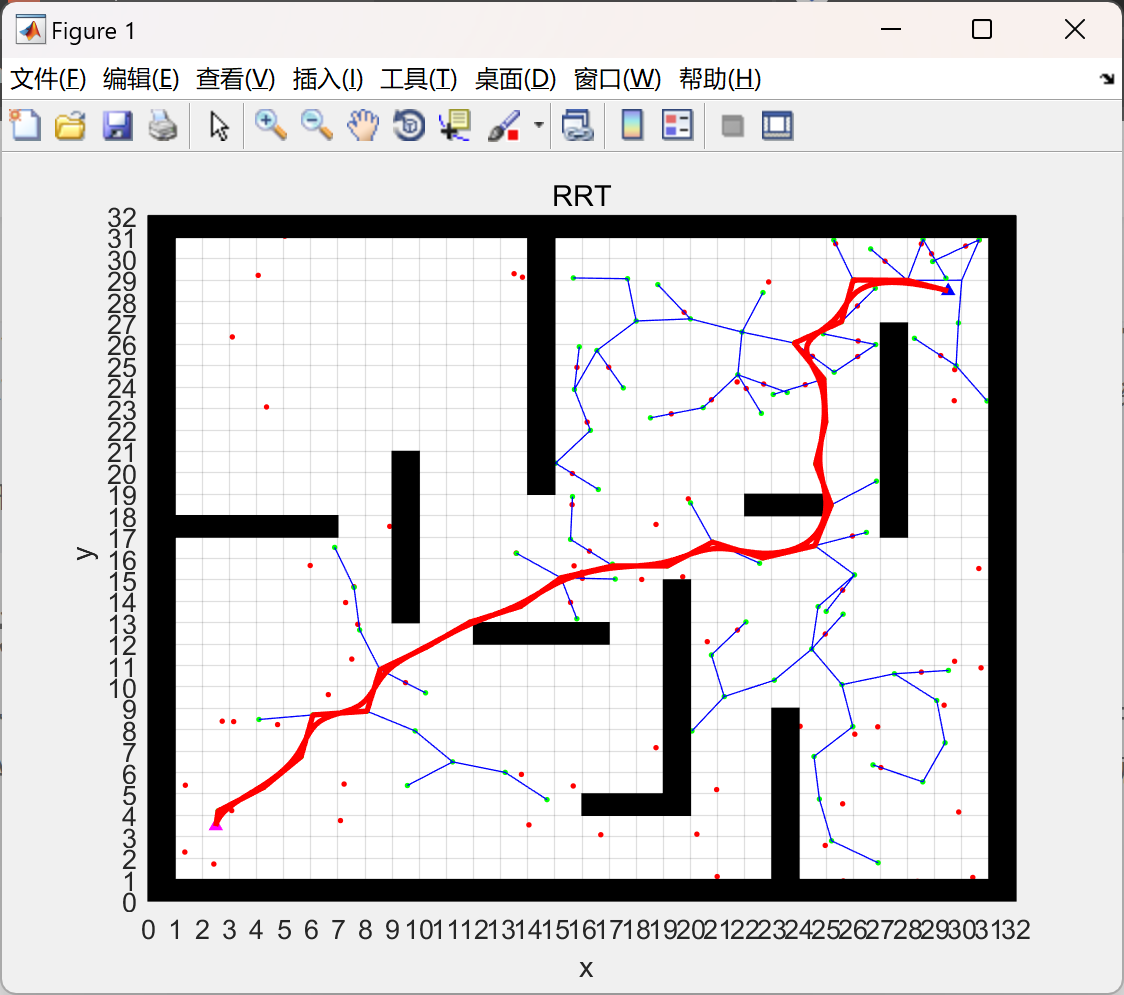
2.2 RRTconnect
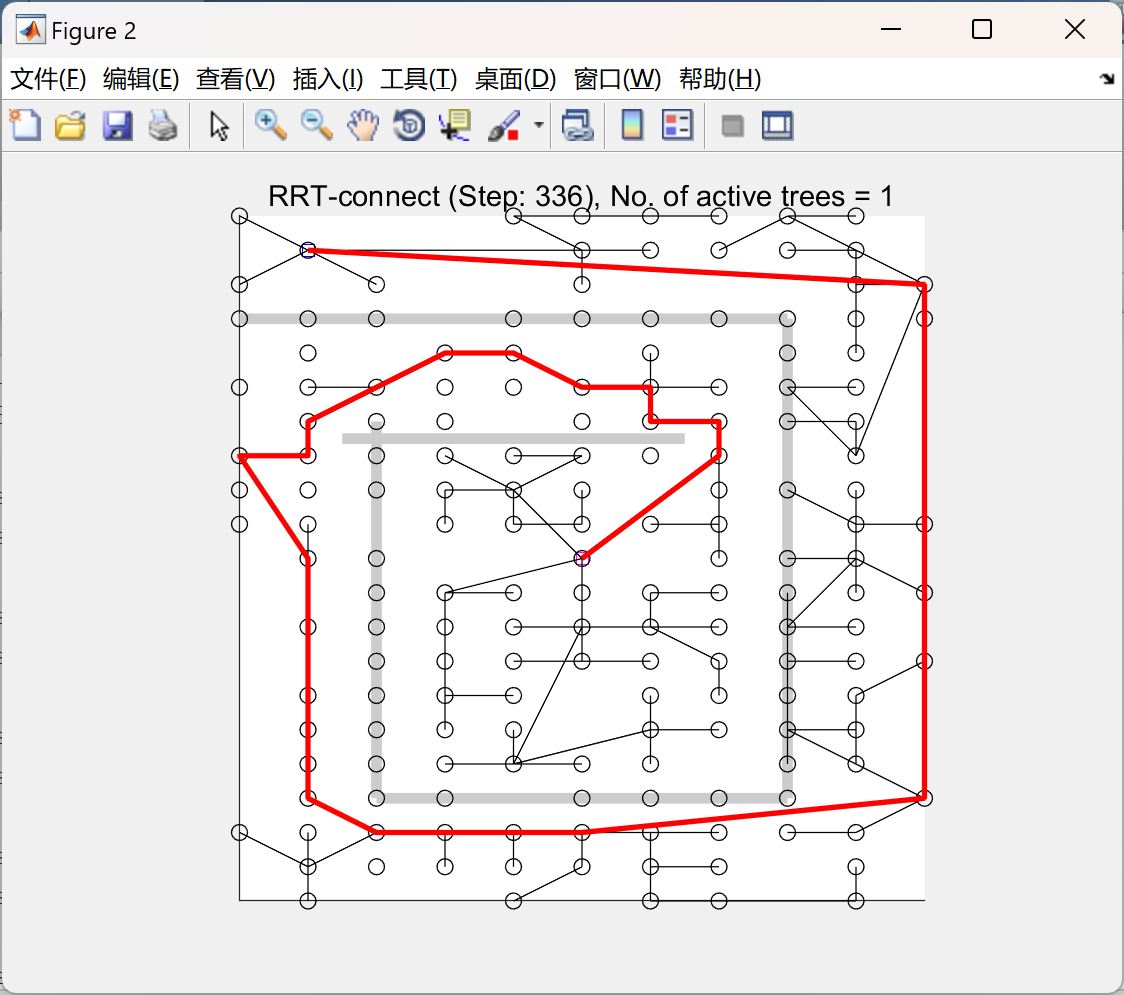
2.3 RRTstar
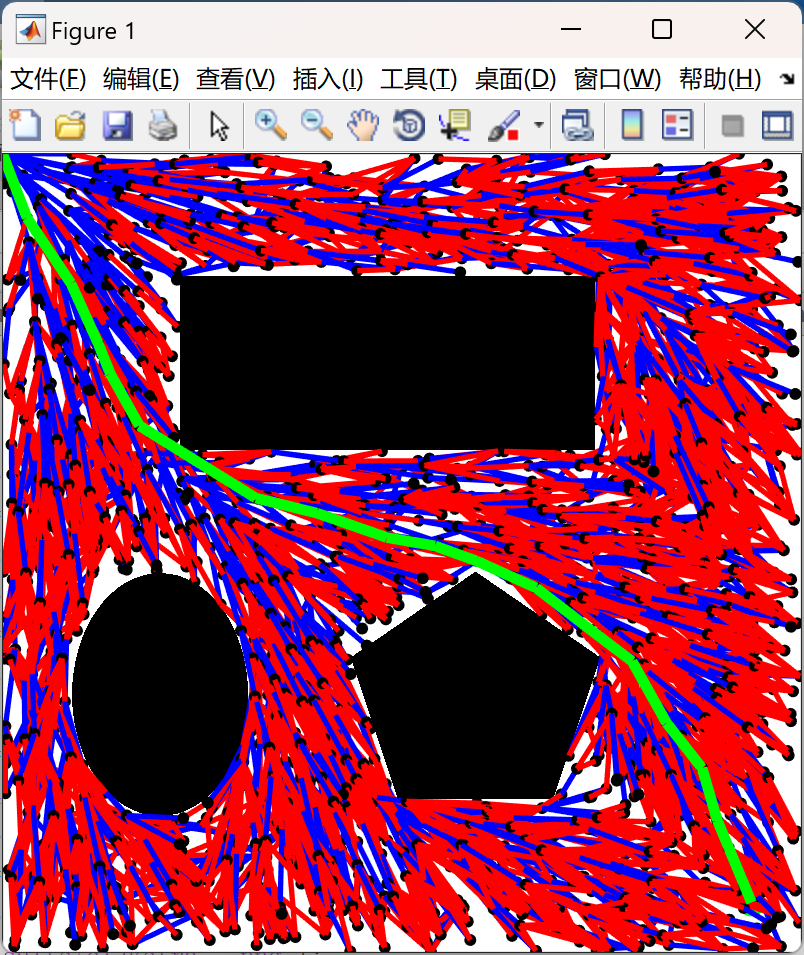
2.4 PRM
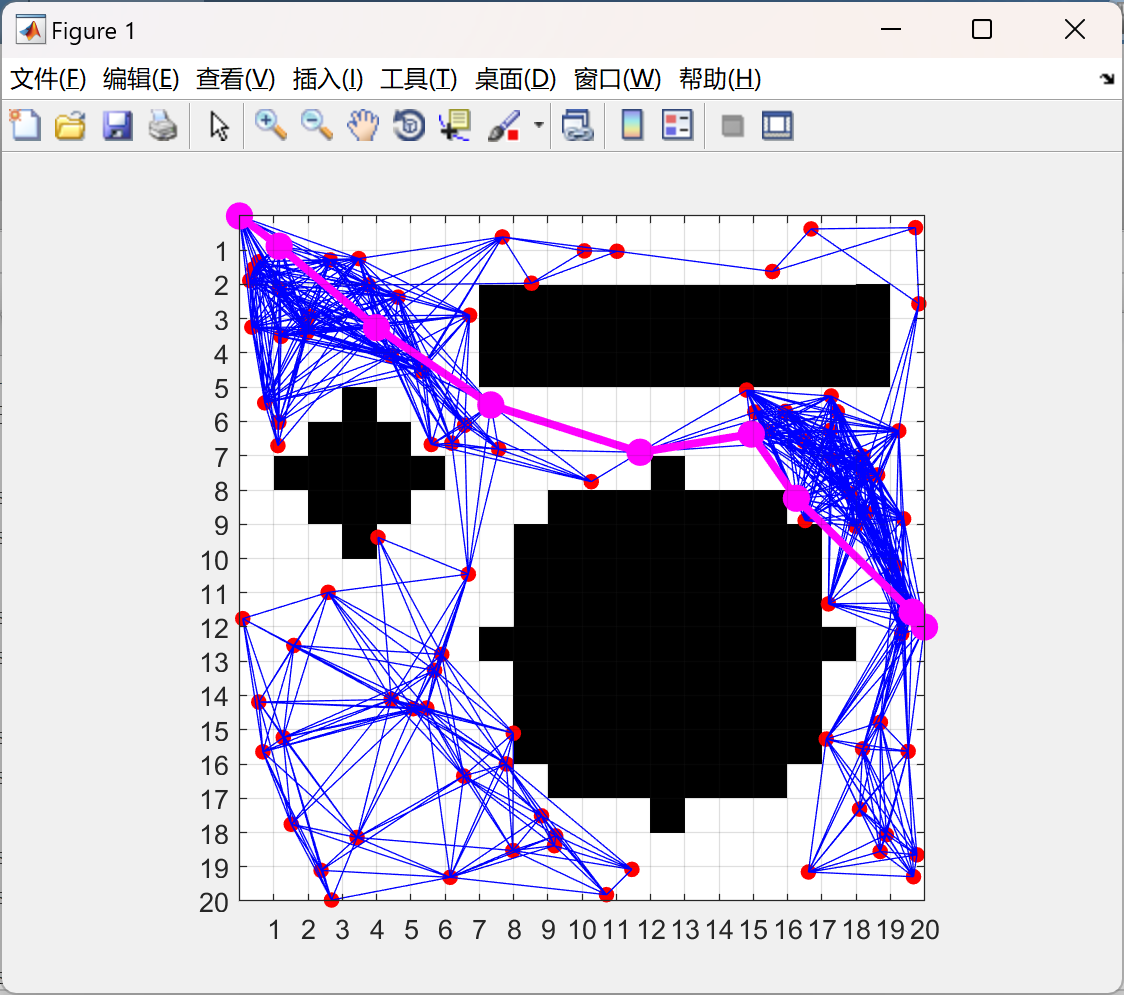
2.5 dijkstra
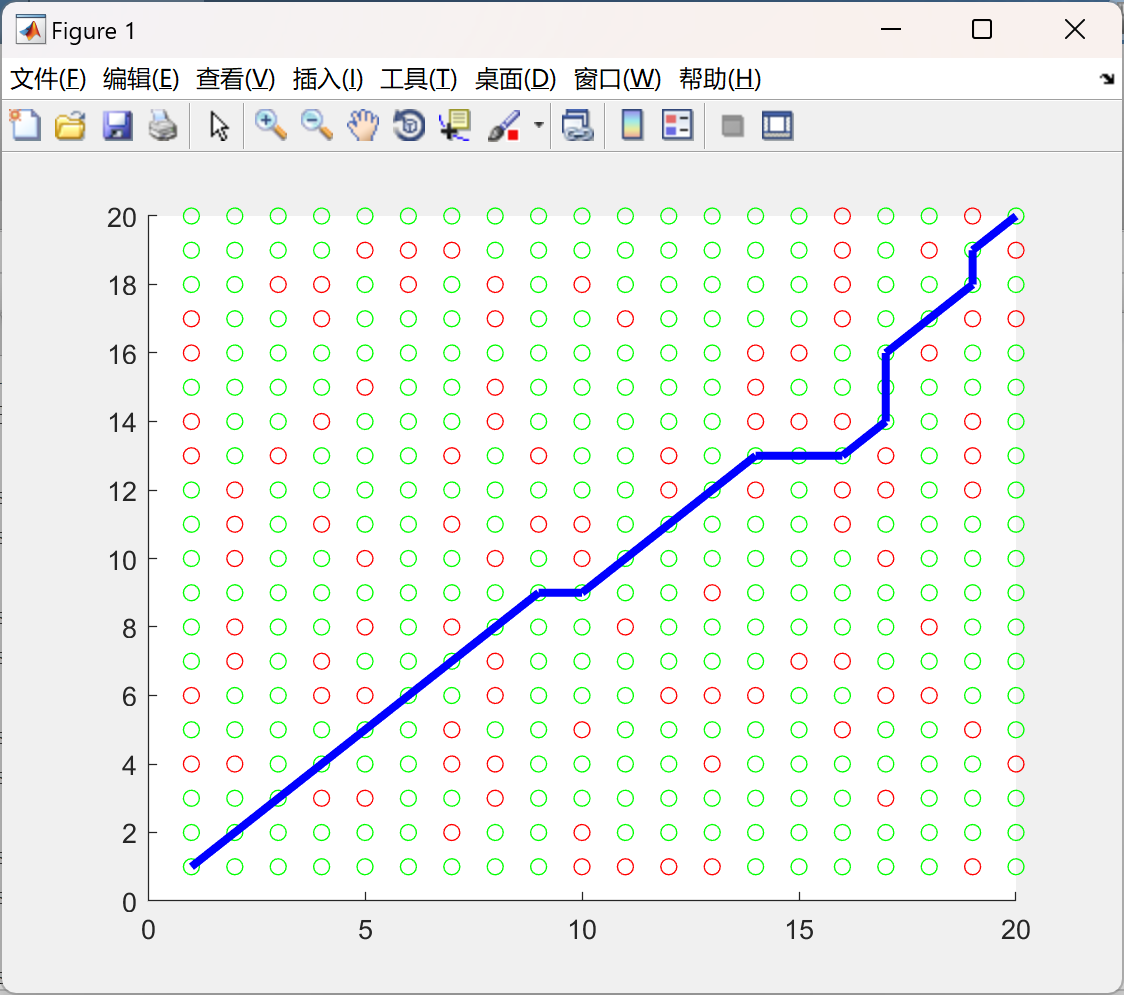
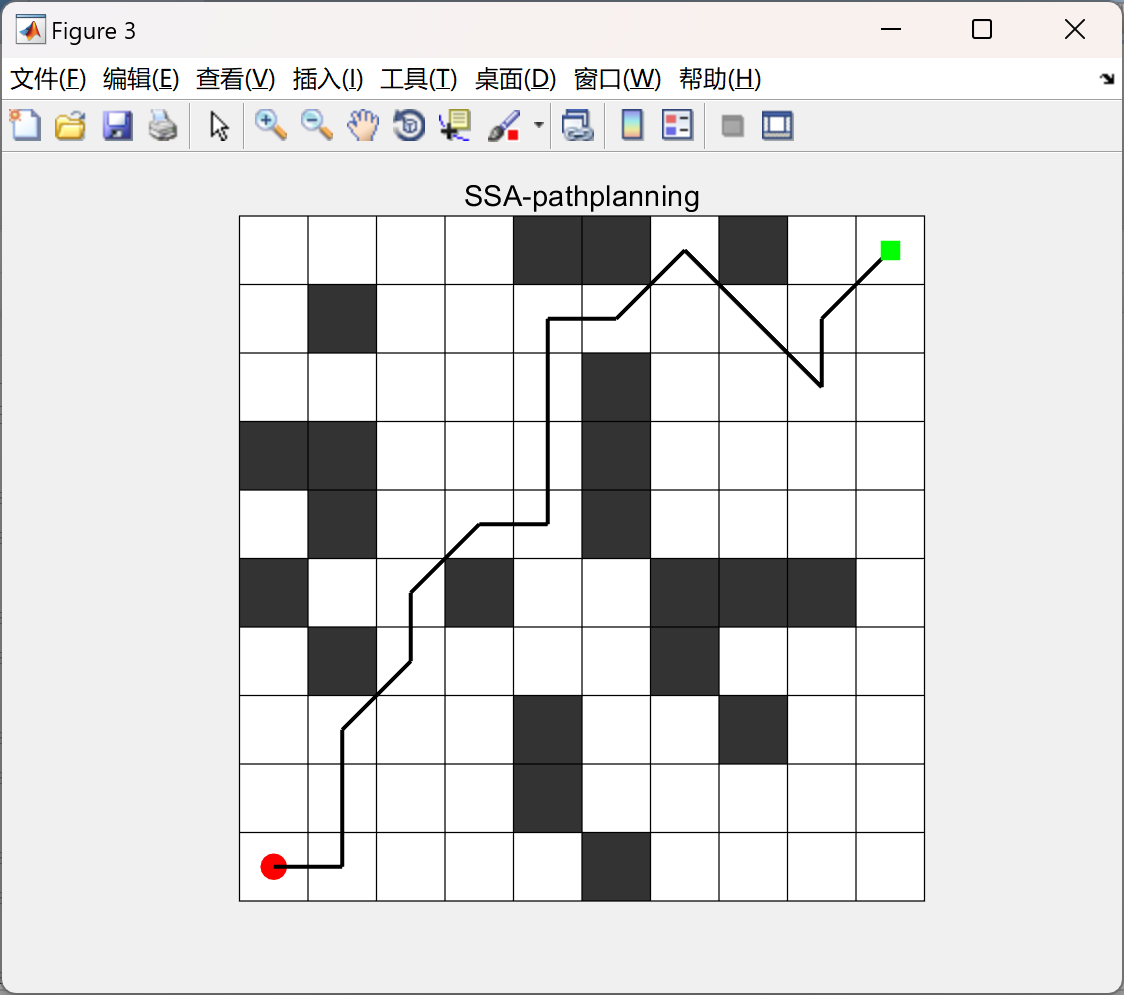
2.6 SSA
2.7 其他算法
主函数切换即可:
CaseToBeRun = 17;
if CaseToBeRun == 1
run('./TestCase_1/RRT.m');
saveas(gcf,'../results/RRT','png');
elseif CaseToBeRun == 2
run('./TestCase_2/RRTconnect.m');
saveas(gcf,'../results/RRTconnect','png');
elseif CaseToBeRun == 3
run('./TestCase_3/RRTstar.m');
saveas(gcf,'../results/RRTstar','png');
elseif CaseToBeRun == 4
run('./TestCase_4/PRM.m');
saveas(gcf,'../results/PRM','png');
elseif CaseToBeRun == 5
run('./TestCase_5/dijkstra.m');
saveas(gcf,'../results/dijkstra','png');
elseif CaseToBeRun == 6
run('./TestCase_6/Astar.m');
saveas(gcf,'../results/Astar','png');
elseif CaseToBeRun == 7
run('./TestCase_7/APF.m');
saveas(gcf,'../results/APF','png');
elseif CaseToBeRun == 8
run('./TestCase_8/DWA.m');
saveas(gcf,'../results/DWA','png');
elseif CaseToBeRun == 9
run('./TestCase_9/GA.m');
saveas(gcf,'../results/GA','png');
elseif CaseToBeRun == 10
run('./TestCase_10/ACO.m');
saveas(gcf,'../results/ACO','png');
elseif CaseToBeRun == 11
run('./TestCase_11/PSO.m');
saveas(gcf,'../results/PSO','png');
elseif CaseToBeRun == 12
run('./TestCase_12/BFO.m');
saveas(gcf,'../results/BFO','png');
elseif CaseToBeRun == 13
run('./TestCase_13/ABC.m');
saveas(gcf,'../results/ABC','png');
elseif CaseToBeRun == 14
run('./TestCase_14/CSA.m');
saveas(gcf,'../results/CSA','png');
elseif CaseToBeRun == 15
run('./TestCase_15/FA.m');
saveas(gcf,'../results/FA','png');
elseif CaseToBeRun == 16
run('./TestCase_16/GWO.m');
saveas(gcf,'../results/GWO','png');
elseif CaseToBeRun == 17
run('./TestCase_17/SSA.m');
saveas(gcf,'../results/SSA','png');
else
error('No such test case!');
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。(文章内容仅供参考,具体效果以运行结果为准)
[1]孟祥甫.移动机器人路径规划[D].东北电力大学[2024-12-04].DOI:CNKI:CDMD:2.2008.051939.
[2]秦浩然,刘明,姜义雯,等.基于改进RRT-Connect算法的仓储AGV路径规划研究[J].微型电脑应用, 2024, 40(5):124-128.
[3]曹毅,张亚宾,周轶,等.基于改进RRT-Connect的空间操作臂避障路径规划研究[J].机床与液压, 2020, 48(12):7.
[4]董文超.改进鲸鱼优化算法在水下机器人路径规划中的应用[D].大连海事大学,2022.
🌈4 Matlab代码实现
资料获取,更多粉丝福利,MATLAB|Simulink|Python资源获取



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









