






文末有项目工程源文件!
第十三届嵌入式程设计与开发程序题

试题解析
(1)CubeMx基础配置
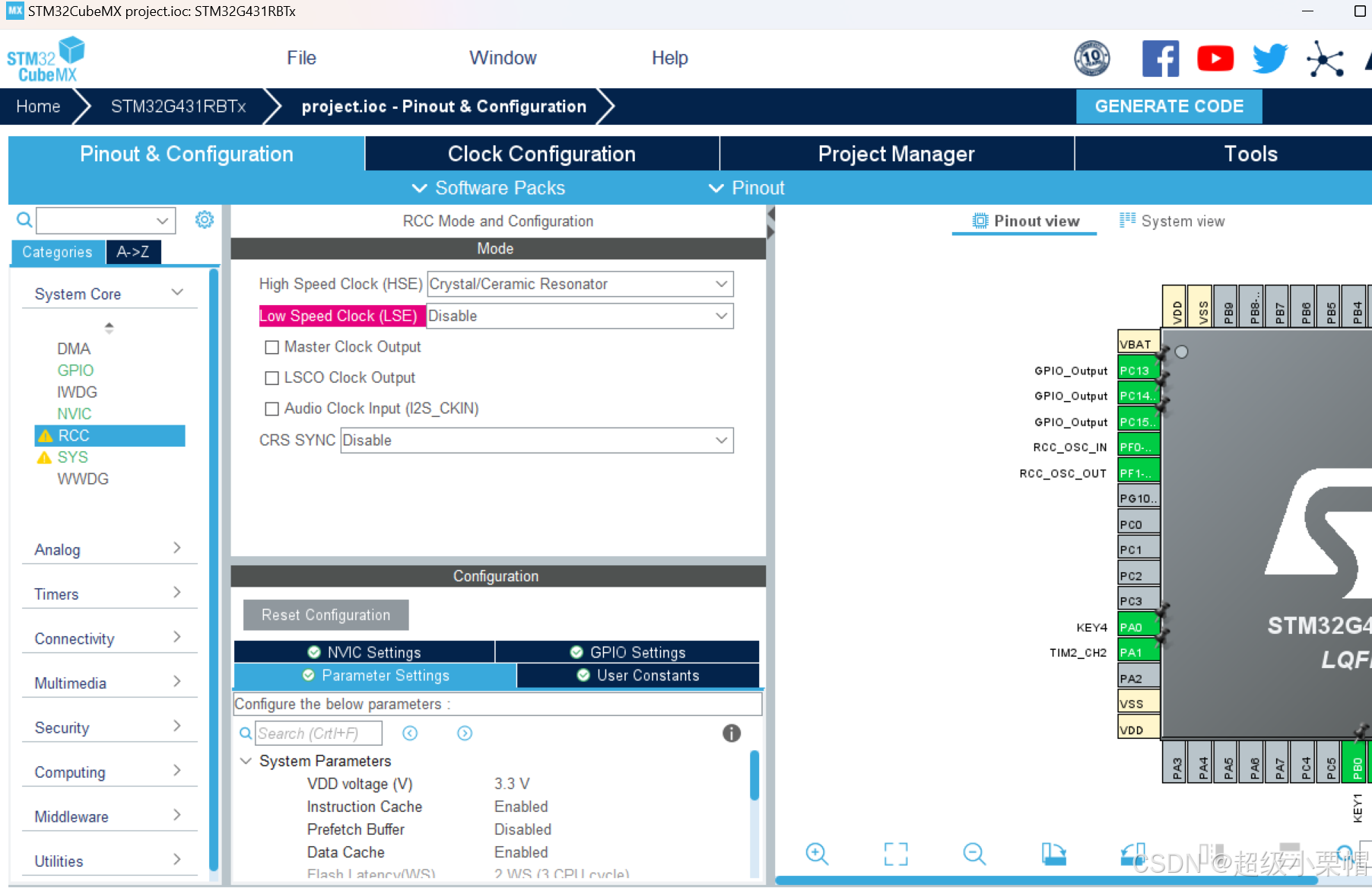
第一步,进入cubemx后打开RCC中的HSE(高速时钟),设置为如图所示。
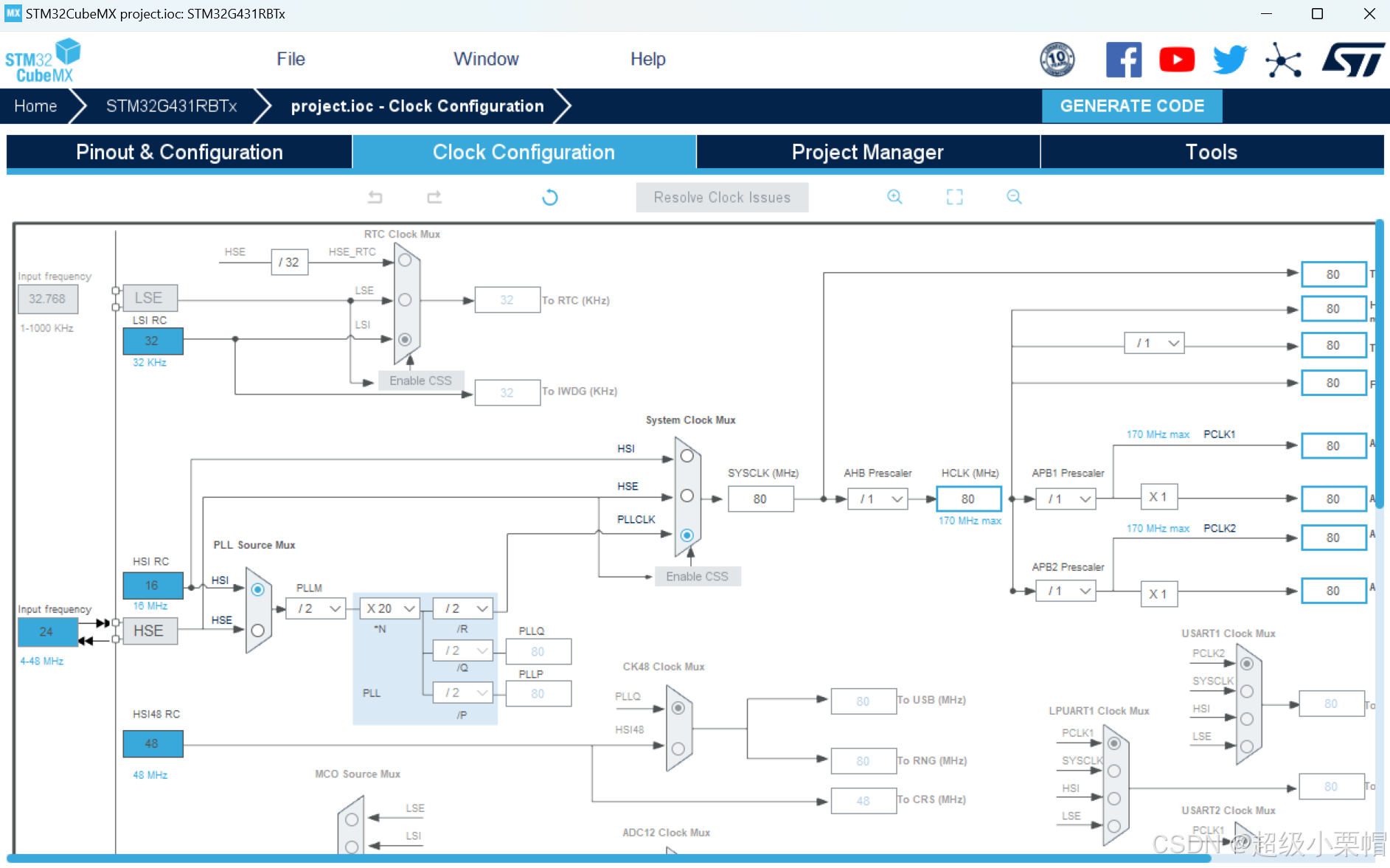
第二步,配置时钟。按照往届蓝桥杯嵌入式的规则,我们需要使用80MHz作为单片机的主频,所以此处可以在HCLK处直接修改为80后,按下回车键(Enter键),系统会自动调整和配置,最后再把Input frequency改写为24。最终效果如图所示。
第三步,设置好项目工程的路径和编译软件。此处需要格外注意,博主本人经过多次实验得出结论:在cubemx设置好了文件路径之后,一但将文件文件位置移动(或者是重命名),工程是打不开的。我强烈建议各位在开始写代码之前多加留心此处,避免后续重新创建工程带来的不必要的麻烦。
配置完路径之后,在下方的Toolchain/IDE中间编译器改为MDK_ARM,也就是我们熟悉的Keil进行编写。完成即可点击右上方的GENERATE CODE。之后会跳出弹窗,可以选择通过点击弹窗进入keil的项目工程,或者关闭后直接在刚刚设置的文件保持路径中寻找工程。
(2)按键部分
cubemx
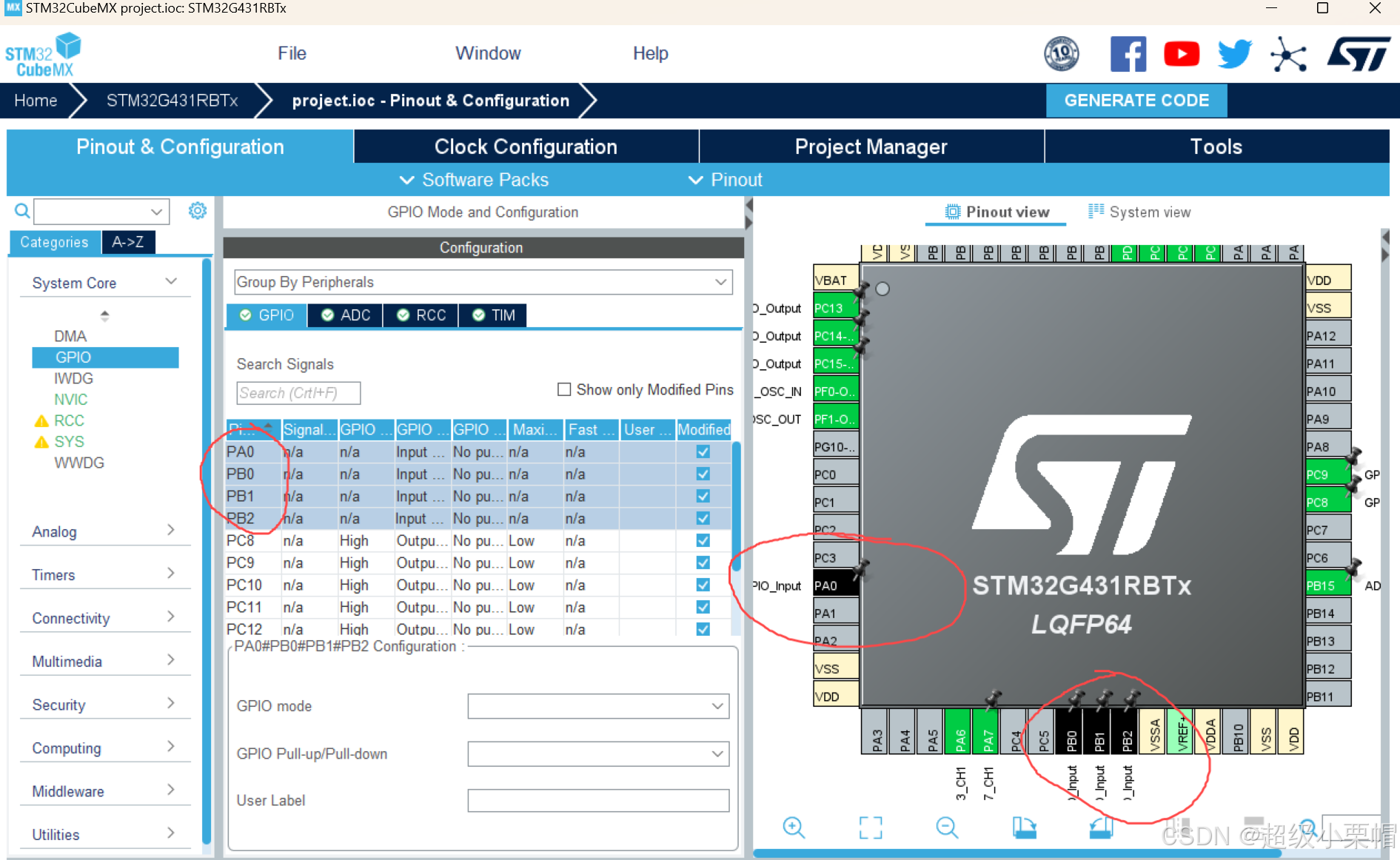 蓝桥杯的按键1到4分别对应着PB0,PB1,PB2,PA0这四个口,都设置为Input即可。
蓝桥杯的按键1到4分别对应着PB0,PB1,PB2,PA0这四个口,都设置为Input即可。
代码
int key_scan(void)
{
char gpio_state = 0;
if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0) == GPIO_PIN_RESET){gpio_state = 1;}
else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1) == GPIO_PIN_RESET){gpio_state = 2;}
else if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2) == GPIO_PIN_RESET){gpio_state = 3;}
else if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET){gpio_state = 4;}
else
{
gpio_state = 0;
}
return gpio_state;
}
int key_pro(void)
{
unsigned char Key_down,Key_now;
static unsigned Key_last = 0;
Key_now = key_scan();
Key_down = Key_now & (Key_now^Key_last);
Key_last = Key_now;
return Key_down;
}这段代码分为两个函数,实现了按键扫描与消抖处理的功能。
key_scan()函数
- 功能:扫描指定的 GPIO 引脚,判断是否有按键被按下,并返回按键对应的编号。
- 步骤:
- 初始化变量
gpio_state为 0,表示没有按键按下。 - 依次检查 GPIOB 的 0 - 2 引脚和 GPIOA 的 0 引脚。使用
HAL_GPIO_ReadPin函数读取引脚电平,若为低电平(GPIO_PIN_RESET),则认为对应按键被按下,将gpio_state设为相应编号(1 - 4)。 - 如果所有检查的引脚都不是低电平,将
gpio_state保持为 0。 - 返回
gpio_state。
- 初始化变量
key_pro()函数
- 功能:对
key_scan函数的结果进行处理,识别按键的按下动作,实现简单的消抖。 - 步骤:
- 定义两个局部变量
Key_down和Key_now,以及一个静态变量Key_last用于记录上一次的按键状态。静态变量只会初始化一次,后续调用函数时会保留上一次的值。 - 调用
key_scan函数获取当前按键状态,存储在Key_now中。 - 通过位运算
Key_now & (Key_now^Key_last)计算按键按下状态。Key_now^Key_last得到两次状态的差异,再与Key_now相与,能筛选出当前按下且上一次未按下的按键。 - 更新
Key_last为当前按键状态Key_now,以便下一次使用。 - 返回
Key_down,表示当前新按下的按键。
- 定义两个局部变量
(3)LED灯
cubemx
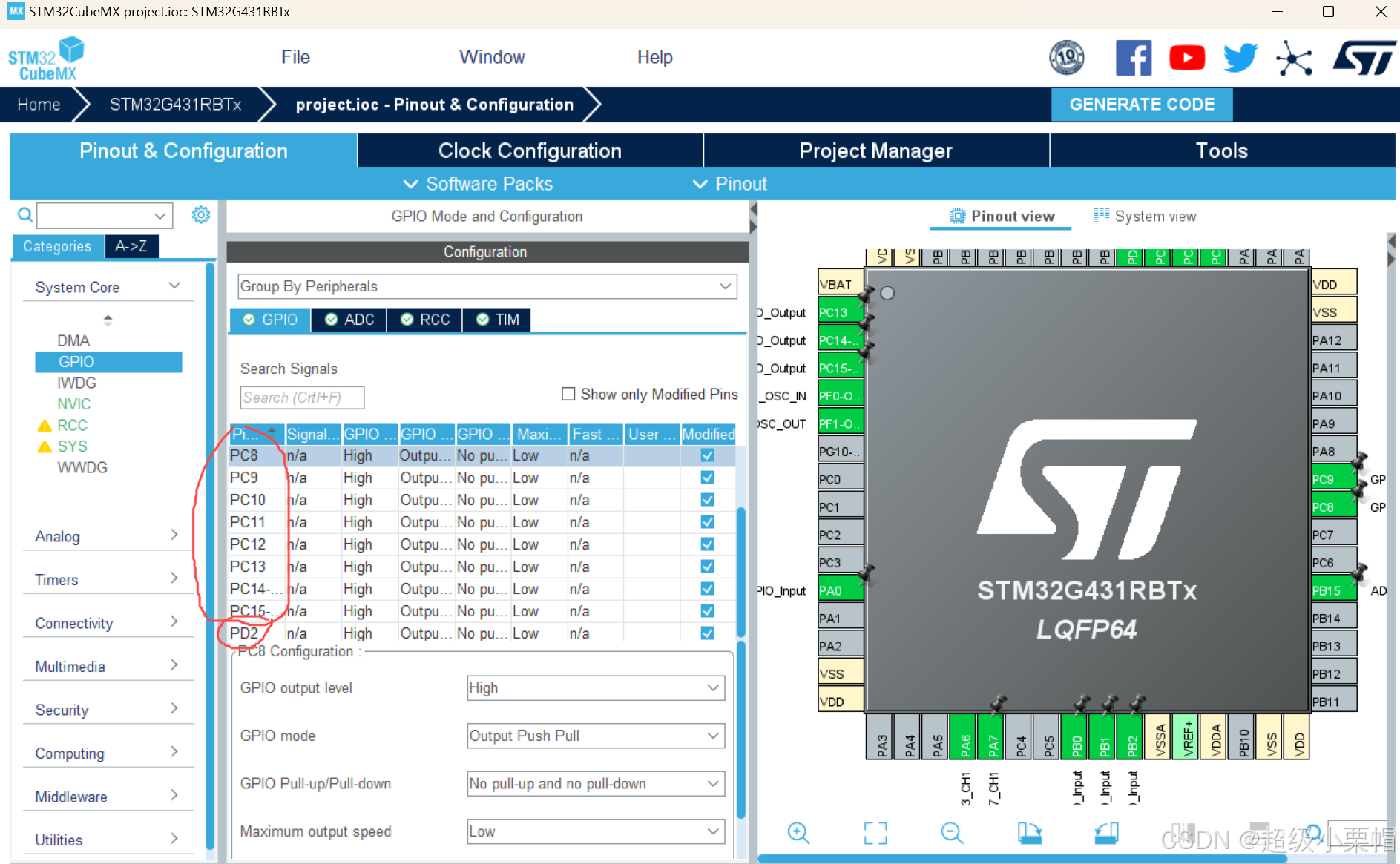
PC8到PC15对应着LED1到LED8这8个LED,PD2是控制LED的锁存器开关。以上这些IO口全部配置相同,具体配置内容如图所示。
代码
void changeAllLedByNumber(char ledstate)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_8|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|
GPIO_PIN_12|GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15,(ledstate==1?GPIO_PIN_RESET:GPIO_PIN_SET));
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
void changeLedStateByLocation(uint16_t LEDLOCATION,char ledstate)
{
HAL_GPIO_WritePin(GPIOC,LEDLOCATION,(ledstate==1?GPIO_PIN_RESET:GPIO_PIN_SET));
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}changeAllLedByNumber 函数
- 功能:根据传入的参数
ledstate控制 GPIOC 端口的 8 个引脚(GPIO_PIN_8到GPIO_PIN_15)连接的 LED 灯的亮灭状态。 - 参数:
ledstate:一个字符型变量,用于指定 LED 灯的状态。当ledstate为 1 时,LED 灯点亮;当ledstate不为 1 时,LED 灯熄灭。
changeLedStateByLocation 函数
- 功能:根据传入的参数
LEDLOCATION和ledstate控制 GPIOC 端口指定引脚连接的 LED 灯的亮灭状态。 - 参数:
LEDLOCATION:一个 16 位无符号整数,用于指定要控制的 LED 灯所连接的 GPIOC 端口的引脚。ledstate:一个字符型变量,用于指定 LED 灯的状态。当ledstate为 1 时,LED 灯点亮;当ledstate不为 1 时,LED 灯熄灭。
对于蓝桥杯来说,基本上使用以上这两个LED函数就足以完成所有LED相关的功能,剩下的就是题目要求的一些逻辑处理。
(4)定时器(PWM和内部触发时钟)
cubemx
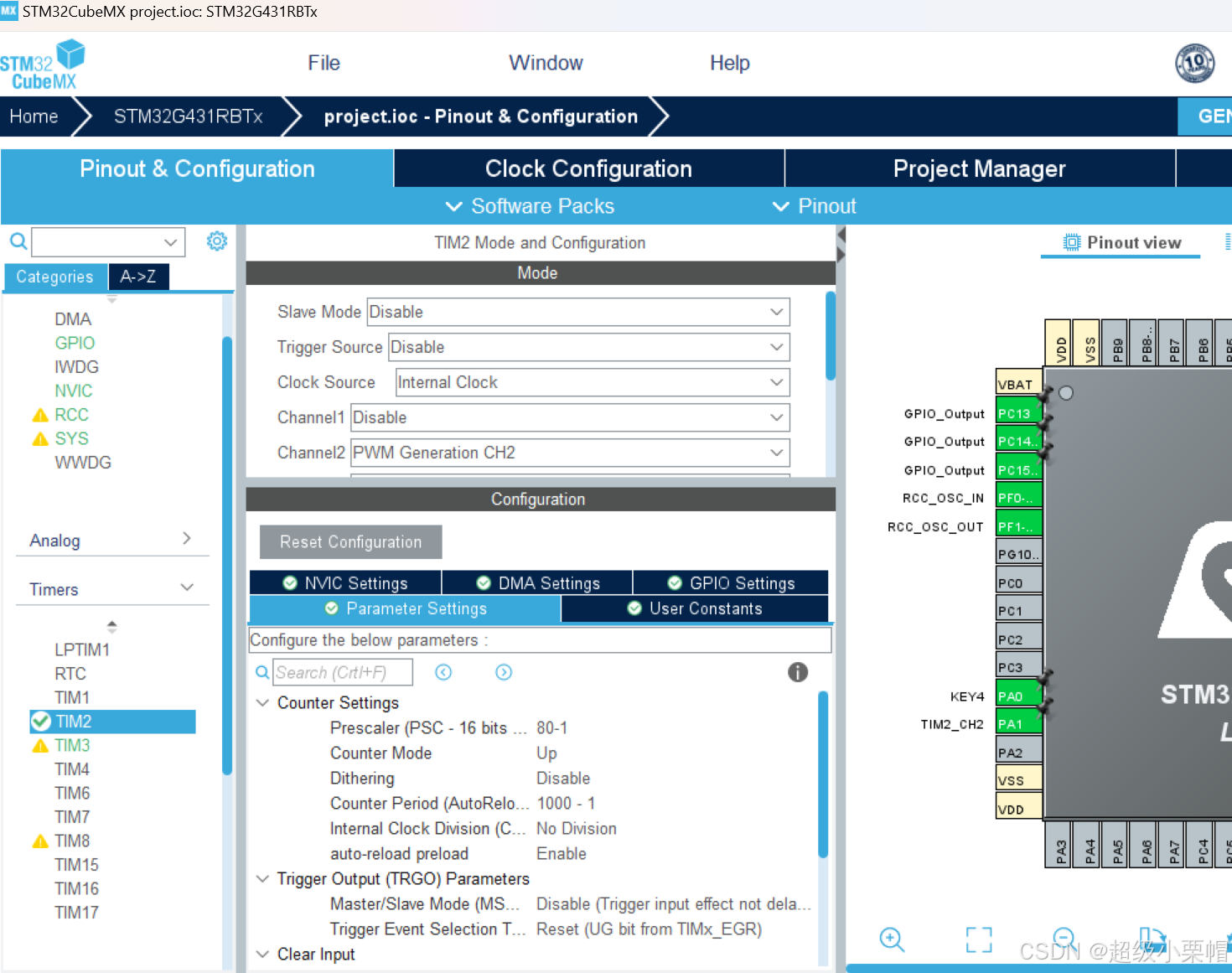
PWM的配置
图中的PSC代表的是分频系数,ARR的自动重装载值。因为我们设置的主频为80Mhz,所以此处为了便于后续参数调整,我们使用79(80 - 1)作为分频系数。(Pulse + 1) / (Center Period + 1)为初始设置的占空比大小。此处如果有不懂的建议看这位博主的PWM入门教学,讲的十分清楚:【STM32】HAL库——定时器PWM输出_hal库pwm输出-CSDN博客
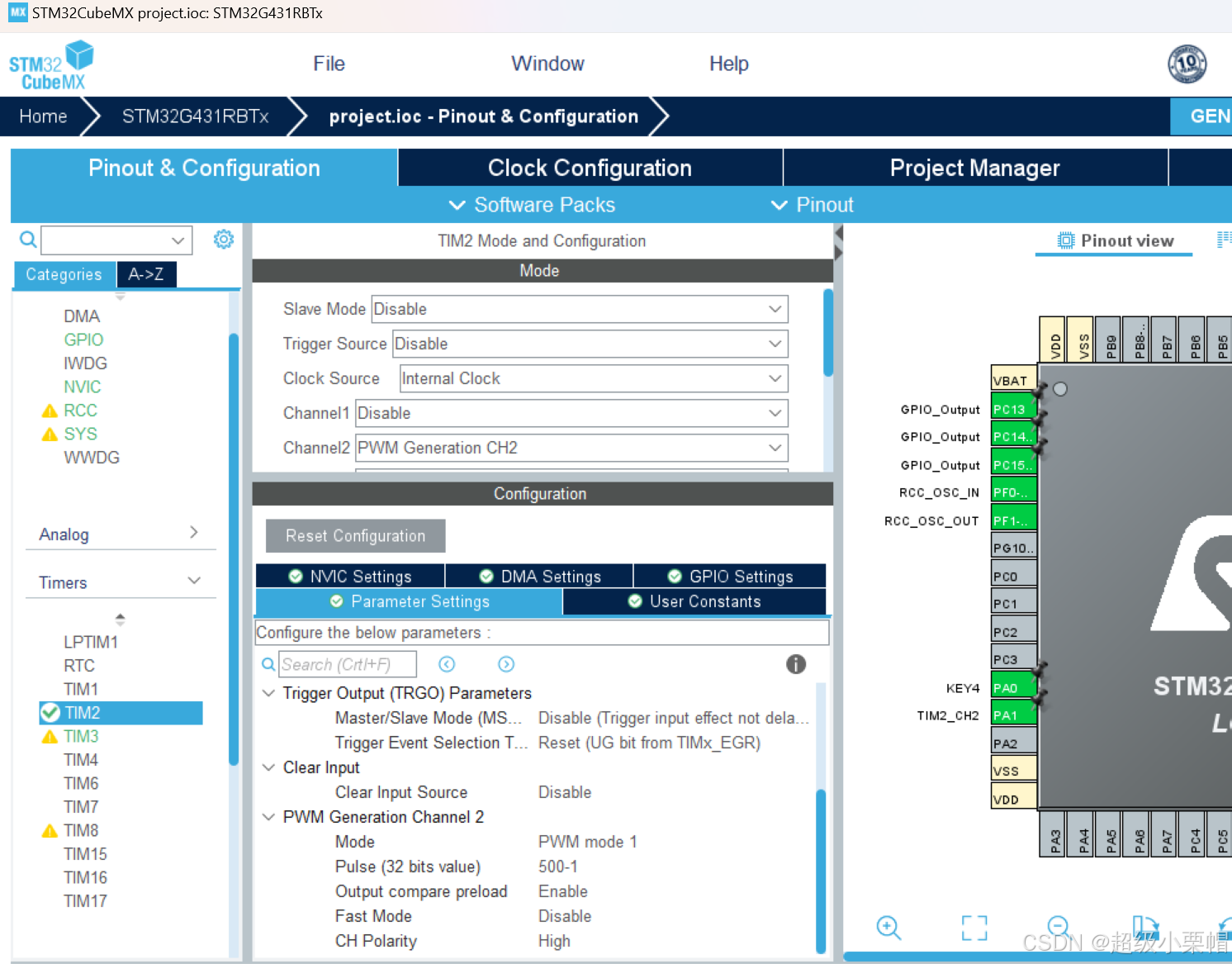
内部触发时钟(博主最爱的操作)
内部触发时钟的意义和system_tick差不多,但是区别在于内部触发时钟的中断响应频率可以自由设置。Center Period表示的是一个技术周期,初始默认从0开始向上计数,当加到Center Period的数值时,就会触发定时器的一个溢出中断。如图所示,当前的中断触发频率为 f = 80 000 000 / (79 + 1) / (999 + 1) = 1000Hz,在程序中我们调用对应定时器的中断回调函数(作为内部触发时钟的定时器是任意的),即可实现动态的函数执行频率控制,具体操作在代码部分有讲解。
代码
此处我重点介绍内部触发时钟的代码操作
//定时器中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) // 1ms
{
static u16 tim_tick = 0;
tim_tick++;
if(tim_tick % 20 == 0)//0.02s,50Hz
{
led_flag = 1;
pwm_flag = 1;
}
if(tim_tick % 25 == 0)//0.025s,40Hz
{
operate_flag = 1;//OS
if(pwmled_flag == 1)
{
if(++pwmled_count>=200){pwmled_flag = 0;pwmled_count = 0;show->page = 1;}//倒计时5s后,清空计数和标志位,将页面切换回1
}
}
if(tim_tick % 50 == 0)//0.05s,20Hz
{
display_flag = 1;//LCD
}
if(tim_tick >= 100)//0.1s,10Hz
{
if(led_flash_flag == 1)//led2
{
led_toggle = 1 - led_toggle;
if(++led_flash_count >= 50){led_flash_flag = 0;led_flash_count = 0;led_toggle = 1;}//倒计时5s后,清空标志位和计数值,同时刷新led_toggle
}
tim_tick = 0;
}
}中断回调函数
定时器厨房中断后最终会进入中断回调函数中,我们可以利用配置好的1ms一次(1000Hz)的中断响应频率进行资源的分配。如图所示,例如,对于LCD的刷新操作,我可以利用标志位,使得控制为每50ms给display_flag(LCD)赋值为1。具体什么是标志位,标志位有什么用,大家在此处先别急,之后我将逐步讲述清楚标志位的工作流程。我们目前只需要知道,我们可以根据题目的要求,设定合适的触发时间,只要对应功能的标志位赋值为1,相应的功能就能完成一次操作。
(5)串口通信
cubemx
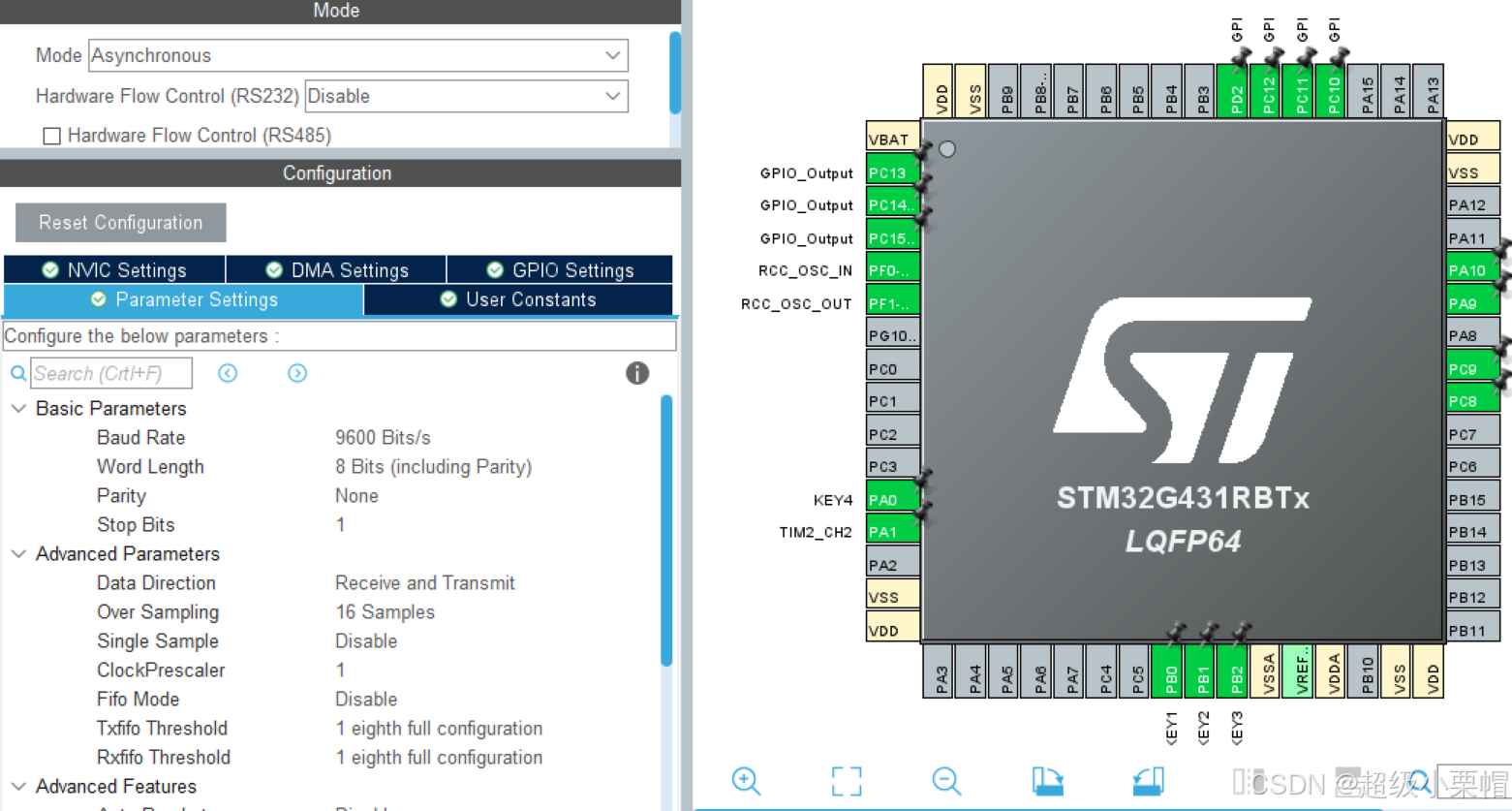
串口的配置相对来说比较简单。将Mode改为Asynchronous,再讲波特率调整为题目所需即可(此处要求为9600)。有一点需要特别注意,如果题目要求使用串口实现电脑与单片机的通信,串口一的RX和TX需要改为PA9和PA10(直接开启串口一默认不是这两个引脚,但是原理图中是配置的这两个引脚)。
代码
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
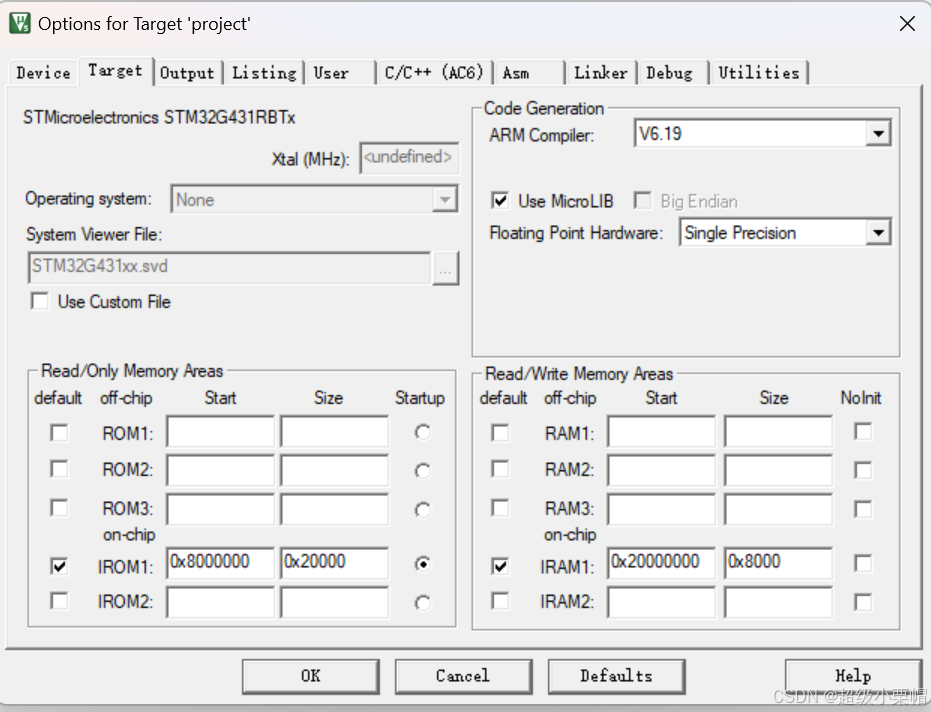
}串口重定向函数
这里的核心代码就是串口重定向函数。简单的说,通过串口重定向,我们可以使用我们在c语言在常用的printf函数对数据进行传输,使用方法也是十分类似。这里要注意两点:第一,使用串口重定向需要引入头文件stdio.h;第二,需要勾选keil中的Use MircoLIB才能有效果,位置在keil的target(小锤子)中,如图所示。
(6)LCD
LCD无需cubemx配置,蓝桥杯官方的驱动中写好了配置,大家只需要正确导入对应的c,h文件即可(三个文件:lcd.c lcd.h font.h)
代码
//LCD初始化
LCD_Init();
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);LCD_Init是LCD初始化配置。
LCD_Clear是将当前屏幕内容清除并填充为括号内的颜色。
SetBackColor是设置背景颜色。
SetTextColor是设置字体颜色。
(7)界面操作系统
void Os_operate(void)
{
if(operate_flag == 1)
{
char key_state = 0;
operate_flag = 0;
key_state = key_pro();
switch(key_state)
{
case 1:
{
if(count_flag_1 == 1)
{
if(++password->mima_1 >= 10){password->mima_1 = 0;}//保证输入的密码位在0到9之间循环
}
else if(count_flag_1 == 0)//1.初次上电 或者 2.重新回到页面1 或者 3.密码输入失败
{
count_flag_1 = 1;//进入密码调整状态
password->mima_1 = 0;
}
break;
}
case 2:
{
if(count_flag_2 == 1)
{
if(++password->mima_2 >= 10){password->mima_2 = 0;}
}
else if(count_flag_2 == 0)
{
count_flag_2 = 1;
password->mima_2 = 0;
}
break;
}
case 3:
{
if(count_flag_3 == 1)
{
if(++password->mima_3 >= 10){password->mima_3 = 0;}
}
else if(count_flag_3 == 0)
{
count_flag_3 = 1;
password->mima_3 = 0;
}
break;
}
case 4:
{
result_config();//密码判断
if(password_result == 1)
{
show->page = 2;
pwmled_flag = 1;
}
else if(password_result == 0)
{
if(++error_count >= 3){led_flash_flag = 1;error_count = 0;}
}
count_flag_1 = 0;//清空刚刚的密码输入状态
count_flag_2 = 0;
count_flag_3 = 0;
password->mima_1 = 0;//清空刚刚的密码输入
password->mima_2 = 0;
password->mima_3 = 0;
break;
}
default:
{
break;
}
}
}
}在这里首先把标志位的概念进行完善。正如之前所提到的,中断回调函数可以让各功能的标志位按照对应频率赋1。那么,当赋值为1后,各个函数的最外层if语句的逻辑才可以被顺利执行。换句话说,在标志位没有被赋值为1之前,这些功能函数就算一直执行,也无法执行对应的功能,相应的,也就不会占用单片机的资源。这里有个问题,就是哪里可以让我的代码一直执行呢?那么聪明的宝宝可能已经猜到了,是的,我们的所有功能操作函数最终都将被放在while(1)主循环中一直执行。
打个比方来说,while(1)循环里执行的函数像等红灯时的一辆辆汽车,汽车不会熄火,发动机也一直在响应,只是这个时候并没有时间的动作发生。当绿灯亮起,油门踩下,车辆才开始移动。从代码的执行角度,这种红绿灯的引入可以让代码有条不紊的进行,在多种功能的组合使用时显得更加重要。
这里还有一点需要注意,当标志位为1且以及进入对应函数的执行阶段时,注意要及时关闭标志位,避免造成不必要的麻烦。
(8)main函数代码
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2025 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
#define u8 unsigned char
#define u16 unsigned int
#define u32 unsigned long
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
struct Display*show;
struct mima*password;
struct Pwm*pwm_data;
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim2;
TIM_HandleTypeDef htim3;
UART_HandleTypeDef huart1;
/* USER CODE BEGIN PV */
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart1, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART1_UART_Init(void);
static void MX_TIM2_Init(void);
static void MX_TIM3_Init(void);
/* USER CODE BEGIN PFP */
void System_Init(void);
void Display(void);
void Os_operate(void);
void result_config(void);
void pwm_config(void);
void led_config(void);
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
u8 operate_flag = 0;
u8 display_flag = 0;
u8 count_flag_1 = 0;
u8 count_flag_2 = 0;
u8 count_flag_3 = 0;
u8 pwm_flag = 0;
u8 led_flag = 0;
u8 pwmled_flag = 0;
u8 led_flash_flag = 0;
u8 led_toggle = 1;//一但触发,应该先亮再灭的闪烁
u8 pwmled_count = 0;
u8 led_flash_count = 0;
u8 error_count = 0;
u8 password_result = 0;
char ucRxbuff[7] = {0};
char mimabox_1[2] = {0};
char mimabox_2[2] = {0};
char mimabox_3[2] = {0};
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
MX_TIM2_Init();
MX_TIM3_Init();
/* USER CODE BEGIN 2 */
System_Init();
printf("hello\r\n");
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
Os_operate();
Display();
pwm_config();
led_config();
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV1;
RCC_OscInitStruct.PLL.PLLN = 10;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2;
RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM2 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM2_Init(void)
{
/* USER CODE BEGIN TIM2_Init 0 */
/* USER CODE END TIM2_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
/* USER CODE BEGIN TIM2_Init 1 */
/* USER CODE END TIM2_Init 1 */
htim2.Instance = TIM2;
htim2.Init.Prescaler = 80-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 999;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim2, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
if (HAL_TIM_PWM_Init(&htim2) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim2, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 499;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
if (HAL_TIM_PWM_ConfigChannel(&htim2, &sConfigOC, TIM_CHANNEL_2) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM2_Init 2 */
/* USER CODE END TIM2_Init 2 */
HAL_TIM_MspPostInit(&htim2);
}
/**
* @brief TIM3 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM3_Init(void)
{
/* USER CODE BEGIN TIM3_Init 0 */
/* USER CODE END TIM3_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM3_Init 1 */
/* USER CODE END TIM3_Init 1 */
htim3.Instance = TIM3;
htim3.Init.Prescaler = 80-1;
htim3.Init.CounterMode = TIM_COUNTERMODE_UP;
htim3.Init.Period = 999;
htim3.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim3.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim3) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim3, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim3, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM3_Init 2 */
/* USER CODE END TIM3_Init 2 */
}
/**
* @brief USART1 Initialization Function
* @param None
* @retval None
*/
static void MX_USART1_UART_Init(void)
{
/* USER CODE BEGIN USART1_Init 0 */
/* USER CODE END USART1_Init 0 */
/* USER CODE BEGIN USART1_Init 1 */
/* USER CODE END USART1_Init 1 */
huart1.Instance = USART1;
huart1.Init.BaudRate = 9600;
huart1.Init.WordLength = UART_WORDLENGTH_8B;
huart1.Init.StopBits = UART_STOPBITS_1;
huart1.Init.Parity = UART_PARITY_NONE;
huart1.Init.Mode = UART_MODE_TX_RX;
huart1.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart1.Init.OverSampling = UART_OVERSAMPLING_16;
huart1.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart1.Init.ClockPrescaler = UART_PRESCALER_DIV1;
huart1.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart1) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetTxFifoThreshold(&huart1, UART_TXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_SetRxFifoThreshold(&huart1, UART_RXFIFO_THRESHOLD_1_8) != HAL_OK)
{
Error_Handler();
}
if (HAL_UARTEx_DisableFifoMode(&huart1) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART1_Init 2 */
/* USER CODE END USART1_Init 2 */
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOC_CLK_ENABLE();
__HAL_RCC_GPIOF_CLK_ENABLE();
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOD_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOC, GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_SET);
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_2, GPIO_PIN_RESET);
/*Configure GPIO pins : PC13 PC14 PC15 PC8
PC9 PC10 PC11 PC12 */
GPIO_InitStruct.Pin = GPIO_PIN_13|GPIO_PIN_14|GPIO_PIN_15|GPIO_PIN_8
|GPIO_PIN_9|GPIO_PIN_10|GPIO_PIN_11|GPIO_PIN_12;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOC, &GPIO_InitStruct);
/*Configure GPIO pin : KEY4_Pin */
GPIO_InitStruct.Pin = KEY4_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(KEY4_GPIO_Port, &GPIO_InitStruct);
/*Configure GPIO pins : KEY1_Pin KEY2_Pin KEY3_Pin */
GPIO_InitStruct.Pin = KEY1_Pin|KEY2_Pin|KEY3_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(GPIOB, &GPIO_InitStruct);
/*Configure GPIO pin : PD2 */
GPIO_InitStruct.Pin = GPIO_PIN_2;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
//系统初始化函数
void System_Init(void)
{
//LCD初始化
LCD_Init();
LCD_Clear(Black);
LCD_SetBackColor(Black);
LCD_SetTextColor(White);
//关闭所有LED灯
changeAllLedByNumber(OFF);
//打开串口
HAL_UART_Receive_IT(&huart1,(uint8_t *)&ucRxbuff,sizeof(ucRxbuff));
//结构体初始化
show = (struct Display*)malloc(sizeof(struct Display));//根据结构体大小分配内存
password = (struct mima*)malloc(sizeof(struct mima));
pwm_data = (struct Pwm*)malloc(sizeof(struct Pwm));
//LCD显示页数
show->page = 1;
//按键调整的输入密码
password->mima_1 = 0;
password->mima_2 = 0;
password->mima_3 = 0;
//正确的密码
password->mima_true_1 = 1;
password->mima_true_2 = 2;
password->mima_true_3 = 3;
//PWM的频率和占空比
pwm_data->fre = 1000;
pwm_data->duty = 50;
//定时器时钟初始化
HAL_TIM_Base_Start_IT(&htim3);
//开启PWM
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_2);
}
//LCD显示函数
void Display(void)
{
char temp[20];
if(display_flag == 1)
{
display_flag = 0;
if(show->page == 1)
{
LCD_DisplayStringLine(Line1,(uint8_t*)" PSD ");
if(count_flag_1 == 1){sprintf(temp," B1:%d ",password->mima_1);}
else if(count_flag_1 == 0){sprintf(temp," B1:@ ");}
LCD_DisplayStringLine(Line3,(uint8_t*)temp);
if(count_flag_2 == 1){sprintf(temp," B2:%d ",password->mima_2);}
else if(count_flag_2 == 0){sprintf(temp," B2:@ ");}
LCD_DisplayStringLine(Line4,(uint8_t*)temp);
if(count_flag_3 == 1){sprintf(temp," B3:%d ",password->mima_3);}
else if(count_flag_3 == 0){sprintf(temp," B3:@ ");}
LCD_DisplayStringLine(Line5,(uint8_t*)temp);
}
else if(show->page == 2)
{
LCD_DisplayStringLine(Line1,(uint8_t*)" STA ");
sprintf(temp," F:%dHz ",pwm_data->fre);
LCD_DisplayStringLine(Line3,(uint8_t*)temp);
sprintf(temp," D:%d%% ",pwm_data->duty);//连用两个百分号是强制打印一个百分号
LCD_DisplayStringLine(Line4,(uint8_t*)temp);
sprintf(temp," ");//用空白进行覆盖
LCD_DisplayStringLine(Line5,(uint8_t*)temp);
}
}
}
//操作系统处理函数
void Os_operate(void)
{
if(operate_flag == 1)
{
char key_state = 0;
operate_flag = 0;
key_state = key_pro();
switch(key_state)
{
case 1:
{
if(count_flag_1 == 1)
{
if(++password->mima_1 >= 10){password->mima_1 = 0;}//保证输入的密码位在0到9之间循环
}
else if(count_flag_1 == 0)//1.初次上电 或者 2.重新回到页面1 或者 3.密码输入失败
{
count_flag_1 = 1;//进入密码调整状态
password->mima_1 = 0;
}
break;
}
case 2:
{
if(count_flag_2 == 1)
{
if(++password->mima_2 >= 10){password->mima_2 = 0;}
}
else if(count_flag_2 == 0)
{
count_flag_2 = 1;
password->mima_2 = 0;
}
break;
}
case 3:
{
if(count_flag_3 == 1)
{
if(++password->mima_3 >= 10){password->mima_3 = 0;}
}
else if(count_flag_3 == 0)
{
count_flag_3 = 1;
password->mima_3 = 0;
}
break;
}
case 4:
{
result_config();//密码判断
if(password_result == 1)
{
show->page = 2;
pwmled_flag = 1;
}
else if(password_result == 0)
{
if(++error_count >= 3){led_flash_flag = 1;error_count = 0;}
}
count_flag_1 = 0;//清空刚刚的密码输入状态
count_flag_2 = 0;
count_flag_3 = 0;
password->mima_1 = 0;//清空刚刚的密码输入
password->mima_2 = 0;
password->mima_3 = 0;
break;
}
default:
{
break;
}
}
}
}
//密码判断函数
void result_config(void)
{
if((password->mima_1 == password->mima_true_1) && (password->mima_2 == password->mima_true_2) && (password->mima_3 == password->mima_true_3))
{
password_result = 1;
}
else
{
password_result = 0;
}
}
//PWM判断函数
void pwm_config(void)
{
if(pwm_flag == 1)
{
pwm_flag = 0;
if(pwmled_flag == 1)
{
pwm_data->duty = 10;
pwm_data->fre = 2000;
__HAL_TIM_SetAutoreload(&htim2,500-1);//2kHz
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,50-1);//10%
}
else
{
pwm_data->duty = 50;
pwm_data->fre = 1000;
__HAL_TIM_SetAutoreload(&htim2,1000-1);//1kHz
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_2,500-1);//50%
}
}
}
void led_config(void)
{
if(led_flag == 1)
{
led_flag = 0;
changeAllLedByNumber(OFF);
if(pwmled_flag == 1)
{
changeLedStateByLocation(LED1,ON);
}
else
{
changeLedStateByLocation(LED1,OFF);
}
if(led_flash_flag == 1)
{
if(led_toggle == 1){changeLedStateByLocation(LED2,ON);}
else if(led_toggle == 0){changeLedStateByLocation(LED2,OFF);}
}
}
}
//定时器中断回调函数
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) // 1ms
{
static u16 tim_tick = 0;
tim_tick++;
if(tim_tick % 20 == 0)//0.02s,50Hz
{
led_flag = 1;
pwm_flag = 1;
}
if(tim_tick % 25 == 0)//0.025s,40Hz
{
operate_flag = 1;//OS
if(pwmled_flag == 1)
{
if(++pwmled_count>=200){pwmled_flag = 0;pwmled_count = 0;show->page = 1;}//倒计时5s后,清空计数和标志位,将页面切换回1
}
}
if(tim_tick % 50 == 0)//0.05s,20Hz
{
display_flag = 1;//LCD
}
if(tim_tick >= 100)//0.1s,10Hz
{
if(led_flash_flag == 1)//led2
{
led_toggle = 1 - led_toggle;
if(++led_flash_count >= 50){led_flash_flag = 0;led_flash_count = 0;led_toggle = 1;}//倒计时5s后,清空标志位和计数值,同时刷新led_toggle
}
tim_tick = 0;
}
}
//串口接收中断回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
if(huart->Instance == USART1)//串口一接收
{
sprintf(mimabox_1,"%d",password->mima_true_1);
sprintf(mimabox_2,"%d",password->mima_true_2);
sprintf(mimabox_3,"%d",password->mima_true_3);
if((ucRxbuff[0] == mimabox_1[0]) && (ucRxbuff[1] == mimabox_2[0]) && (ucRxbuff[2] == mimabox_3[0]))
{
password->mima_true_1 = ucRxbuff[4] - '0';
password->mima_true_2 = ucRxbuff[5] - '0';
password->mima_true_3 = ucRxbuff[6] - '0';
printf("%d\r\n",password->mima_true_1);
printf("%d\r\n",password->mima_true_2);
printf("%d\r\n",password->mima_true_3);
}
HAL_UART_Receive_IT(&huart1, (uint8_t*)ucRxbuff, sizeof(ucRxbuff));
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
项目工程文件
主打一个开源共享,一起进步。
通过网盘分享的文件:shengsai_13.zip
链接: https://pan.baidu.com/s/19LEb8qbN3v4hjwiA7zbzMA?pwd=1732 提取码: 1732
可以照搬使用我的代码,但如果用于参加比赛或者其他公开使用,请务必私信联系我,并表明出处。

















 916
916

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









