







一、编码器定义与核心功能
编码器(Encoder) 是一种将机械运动(旋转或直线位移)转换为电信号的传感器,用于测量位置、速度、角度或方向。核心功能:
- 位置检测:实时反馈机械部件的绝对位置或相对位移
- 速度测量:通过单位时间内的脉冲数计算转速或线速度
- 方向判断:通过信号相位差识别运动方向
- 系统控制:为伺服系统、机器人、机床等提供闭环控制反馈
二、核心分类与技术原理
(一)按运动形式分类
-
旋转编码器(Rotary Encoder)
- 测量旋转运动,输出角位移、转速等信号。
- 细分:
- 增量式(Incremental Encoder)
- 原理:码盘刻有均匀栅格,光源+光敏元件生成A/B两相正交脉冲(相位差90°),通过脉冲计数和相位差判断位移和方向;Z相(零位)用于复位参考点。
- 特点:结构简单、成本低,但断电后位置信息丢失,需回零校准;精度依赖脉冲数(分辨率:50-8000 PPR,脉冲/转)。
- 绝对式(Absolute Encoder)
- 原理:码盘采用多圈同心轨道,每圈对应二进制位(如8位、13位),每个位置输出唯一编码(二进制、格雷码等)。单圈绝对式通过码道数决定分辨率,多圈式通过齿轮组或电池备份实现多圈位置记录。
- 特点:无需参考点,断电后保留位置;精度高(单圈分辨率12-25位),但结构复杂、成本高。
- 混合式编码器:同时输出增量式A/B/Z信号和绝对式位置信号,兼顾成本与功能。
- 增量式(Incremental Encoder)
-
线性编码器(Linear Encoder)
- 测量直线位移,核心部件为标尺(光栅尺、磁栅尺)和读数头。
- 原理:标尺刻有周期性刻度,读数头通过光电或磁电感应生成位移信号,输出形式类似增量式或绝对式。
- 应用:精密机床、半导体设备、坐标测量机(CMM)。
(二)按检测原理分类
-
光电式编码器
- 最主流类型,码盘为玻璃或金属材质,透光/不透光区域对应信号0/1。
- 优点:分辨率高(可达百万脉冲/转)、响应速度快;缺点:怕粉尘、油污,需密封设计。
-
磁电式编码器
- 码盘为磁性材料,通过霍尔元件或磁阻传感器检测磁场变化。
- 优点:抗振动、粉尘、油污,耐恶劣环境;缺点:分辨率较低(通常≤2048 PPR),温度漂移影响精度。
-
电磁式编码器
- 利用电磁感应原理(如感应同步器),通过线圈耦合检测位移。
- 优点:高精度、长寿命,适合高温、高湿环境;缺点:体积大、成本高。
-
电容式编码器
- 通过电容极板间距变化检测位移,较少见,用于超精密场景。
三、核心技术参数与性能指标
-
分辨率(Resolution)
- 旋转编码器:每转输出脉冲数(PPR,Pulses Per Revolution)或位数(Bit)。
- 增量式:如2000 PPR,表示每转2000个脉冲;
- 绝对式:单圈分辨率N位,对应2ⁿ个位置(如17位=131072位置/圈)。
- 线性编码器:最小可检测位移(如1μm、0.1μm)。
- 旋转编码器:每转输出脉冲数(PPR,Pulses Per Revolution)或位数(Bit)。
-
精度(Accuracy)
- 绝对精度:测量值与真实值的最大偏差,单位:角秒(″)或毫米(mm)。
- 重复精度:多次测量同一位置的偏差,反映稳定性(如±5″)。
- 影响因素:码盘刻线误差、安装偏心、信号噪声。
-
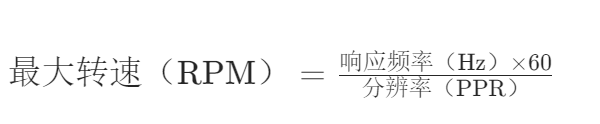
响应频率(Response Frequency)
-
编码器能稳定输出信号的最高频率(Hz),决定最大转速:
-
例:2000 PPR编码器,响应频率100kHz,最大转速= (100,000×60)/2000=3000 RPM。
-
-
输出信号类型
- 增量式:
- 单端信号:A、B、Z(电压或集电极开路,如5V/24V TTL);
- 差分信号:A+/A-、B+/B-、Z+/Z-(RS422,抗干扰能力强,长距离传输)。
- 绝对式:
- 并行输出:直接输出N位二进制码(需多根线缆,易受干扰);
- 串行输出:通过SSI、BiSS、CAN、EtherCAT等总线协议传输(线缆少,抗干扰)。
- 增量式:
-
电源与功耗
- 电压:5V、12V、24V等;
- 功耗:通常10-100mA,低功耗型用于电池设备。
-
防护等级
- IP等级(如IP65:防尘+防低压喷水;IP67:短时浸水),恶劣环境需选高防护型号。
-
机械参数
- 轴径、安装方式(实心轴、空心轴、法兰盘)、转动惯量、最大转速、耐振动/冲击能力(如10G振动,100G冲击)。
四、结构与工作原理
(一)旋转编码器核心部件
-
码盘(Scale/Disk)
- 增量式:单圈均匀刻线,A/B相相差1/4周期,Z相为单刻线(零位)。
- 绝对式:多圈码道,每圈代表一个二进制位(内圈为最高位),格雷码盘相邻位置仅1位变化,避免误码。
-
检测系统
- 光电式:光源(LED)+ 光敏元件(接收透过码盘的光信号);
- 磁电式:永磁体+霍尔传感器阵列(检测磁场分布)。
-
信号处理电路
- 增量式:放大、整形、鉴相(判断A/B相超前/滞后,确定方向);
- 绝对式:编码转换(格雷码转二进制)、纠错、总线协议调制。
(二)工作流程
- 增量式:
- 码盘旋转,A/B相交替输出脉冲,计数器累加/递减;
- 控制器通过脉冲数计算位移,相位差判断方向(A相超前为正,滞后为负);
- Z相每转一次,计数器复位(参考点校准)。
- 绝对式:
- 码盘位置对应唯一编码,直接输出二进制值;
- 多圈式通过齿轮组(机械多圈)或电池(电子多圈)记录圈数,避免单圈限制。
五、典型应用场景
-
工业自动化
- 伺服电机控制(位置闭环)、机床进给系统(线性编码器)、传送带速度同步。
- 例:CNC机床用绝对式编码器实现高精度定位,增量式用于高速动态反馈。
-
机器人领域
- 关节位置检测(多圈绝对式,避免断电复位)、协作机器人扭矩传感器集成。
-
智能设备
- 3D打印机(步进电机控制)、无人机(姿态传感器辅助)、电梯(楼层定位)。
-
航空航天与国防
- 导弹舵机控制、飞机发动机转速监测(耐高温磁电式)、卫星天线角度调整。
-
精密测量
- 三坐标测量机(CMM)、晶圆光刻机(纳米级精度线性编码器)。
六、选型与安装要点
(一)选型步骤
-
确定类型:
- 动态控制、低成本:增量式;
- 高精度定位、断电记忆:绝对式(单圈/多圈);
- 直线位移:线性编码器(光栅尺/磁栅尺)。
-
分辨率与精度:
- 高分辨率(如20位绝对式)用于精密定位,普通场景选10-14位即可。
-
输出接口:
- 短距离、低成本:TTL/集电极开路;
- 长距离、抗干扰:差分信号(RS422)或总线(EtherCAT、PROFINET)。
-
环境适配:
- 粉尘/潮湿:IP67以上;高温(>100℃):电磁式或特殊光电式;强磁场:光电式(避免磁电式)。
(二)安装注意事项
-
机械安装:
- 同轴度:偏差≤0.05mm(避免偏心导致振动和误差);
- 联轴器:弹性联轴器补偿轴向/径向偏差,刚性联轴器用于高精度场景。
-
电气连接:
- 差分信号需用屏蔽双绞线缆,接地良好;
- 绝对式编码器需注意电源稳定性(避免电池没电导致多圈数据丢失)。
-
校准与调试:
- 增量式:首次使用需找零位(Z相脉冲);
- 绝对式:确认初始位置编码与机械零点一致。
七、误差来源与优化
-
机械误差
- 偏心、轴晃动:选择高精度联轴器,定期校准;
- 齿轮间隙(多圈绝对式):采用消隙齿轮或电子多圈(电池备份)。
-
电气误差
- 信号干扰:使用差分输出、屏蔽线,远离动力线缆;
- 分辨率限制:细分技术(如4倍频,增量式脉冲数×4)提升有效精度。
-
环境误差
- 温度漂移:选择宽温型号(如-40℃~+85℃),磁电式需温度补偿;
- 粉尘污染:定期清洁,选用密封结构(如IP68)。
八、前沿技术与发展趋势
-
高分辨率与小型化
- 单圈绝对式达25位(3300万位置/圈),微型编码器直径≤10mm(用于无人机、医疗设备)。
-
多圈无电池技术
- 机械多圈:通过齿轮组传动记录圈数,无需电池,寿命长(如海德汉ERN系列)。
-
智能化与总线集成
- 内置MCU,支持实时诊断(故障预警、温度监测);
- 直接集成工业总线(EtherNet/IP、Modbus TCP),减少信号转换延迟。
-
抗恶劣环境设计
- 磁电式编码器采用MEMS技术,耐振动(>20G)、抗冲击(>1000G);
- 纳米涂层技术提升光电式编码器的防尘防水能力。
-
融合传感器
- 集成温度、加速度传感器,提供多参数反馈;
- 与AI结合,实现预测性维护(如提前预警编码器磨损)。
九、常见问题与解决方案
| 问题 | 原因 | 解决方法 |
|---|---|---|
| 增量式计数错误 | 信号干扰、分辨率不足 | 改用差分信号、增加细分电路 |
| 绝对式位置跳变 | 码盘污染、编码错误 | 清洁码盘、选择格雷码编码 |
| 多圈绝对式数据丢失 | 电池没电(电子多圈) | 定期更换电池、改用机械多圈编码器 |
| 高速旋转时信号丢失 | 响应频率不足 | 选择高响应频率型号,计算最大转速限制 |
| 安装后噪声大 | 同轴度偏差、联轴器刚性不足 | 调整安装精度、更换弹性联轴器 |
十、总结
编码器是工业自动化与智能设备的“眼睛”,其选型需结合精度、环境、成本等多维度需求。增量式适合动态控制,绝对式适合高精度定位,线性编码器则用于直线位移测量。随着技术进步,编码器正朝着高分辨率、智能化、抗恶劣环境方向发展,成为智能制造的核心基础部件。掌握其原理与应用,可有效提升系统控制精度与可靠性。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









