







以下并不是我原创(包括图片),都是来源于网络收集。如CSDN博主,朝夕教育,AI等。
什么是运动控制
运控是指“控制移动”之意,可以利用各种电机进行位置控制等操作,让机器听懂你的指令。
什么是运动控制接口板
是一个中间件,将你的指令传达给具体的实现设备。比如电脑输入了一个步进电机走十步的指令,接口板根据电脑输入的脉冲数量,转换成对应的步进量,让设备去实行。
它的主要任务是接收指令、翻译指令,然后让设备按指令动起来。
- 接收指令:比如你用C#编程告诉它“让这个电机转5圈”。
- 翻译指令:它会把你的指令转成机械能懂的信号(比如脉冲信号)。
- 发出指令:然后传给机械,让它动起来。
什么是电机驱动单元
这是用于驱动步进电机和伺服电机的控制单元。通过向驱动单元进行控制信号的设置/获取,从而进行电机控制。
什么是步进电机
它不像普通电机那样一直转,而是按照你的指令,一步一步地走,每一步都很精确。是可高精度定位的电机,与输入脉冲同步,呈阶梯状地一点点旋转一定角度。由于步进电机根据输入脉冲准确旋转,所以无需旋转量检测就能够高精度定位。一般的分辨率是:1步(1个脉冲)= 1.8°、 0.72°、0.36°等。
什么是步进角
向电机驱动器输入1个脉冲时步进电机转动的角度。一般精度分为:1步(1个脉冲)= 1.8°、 0.72°、0.36°等。
什么是转速
步进电机转动的速度
什么是失步
控制器要求步进十步,但只走了八步,未走的两步叫失步。
什么是伺服电机
是一种“更聪明、更听话”的电机。它不仅能像普通电机那样转动,还能精准控制转速、位置和力矩,而且知道自己“转到了哪儿”或者“用多大力”,所以经常用在需要高精度控制的场景。
伺服电机分为交流伺服电机和直流伺服电机,具备检测转角的编码器,进行闭环高精度的定位。
什么是编码器输入
是运动控制系统中用于反馈位置、速度或方向信息的关键组件。编码器是一种传感器,它能够将机械位移转换为电信号,从而提供有关旋转轴或线性运动的详细信息。编码器通常分为两种主要类型:增量型编码器和绝对型编码器。
编码器输入的主要功能是接收编码器反馈的信息,并将这些信息用于控制和监测设备的动作,比如:
- 控制电机的位置:知道电机转到了哪儿。
- 调节电机的速度:确保转速符合要求。
- 修正动作的误差:如果偏离了目标位置,可以通过反馈信号重新调整。
编码器输入是怎么工作的
- 编码器发送信号:编码器会根据运动状态产生一系列脉冲信号或电压信号,表示当前的位置或速度。
- 设备接收信号:这些信号通过编码器输入端口进入控制系统,比如PLC或驱动器。
- 分析信号:系统根据接收到的信号计算出实际的位置和速度。如果和设定值有差异,控制器会调整设备的运行状态。
主要用途
- 从伺服电机输出脉冲→管理/控制位置信息
- 步进电机的失步检测
脉冲输出信号/输出格式
- 两脉冲方式(独立脉冲输出)
这是输出正方向用(CW)、负正方向用(CCW)2种独立脉冲信号,进行控制的方式。CW(Clock Wise)表示顺时针旋转(右旋),CCW(Counter Clock Wise)表示反时针方向(左旋)。
- OUT(提前脉冲输出)、DIR(滞后脉冲输出)方式
输出OUT(提前脉冲输出)信号和DIR(滞后脉冲输出)信号。当DIR与OUT相位相差+90°时,朝正方向(顺时针方向)动作(旋转)。当DIR与OUT相位相差-90°时,朝负方向(反时针方向)动作(旋转)。
多轴同步、接口板间多轴同步
运动控制接口板能够对多个轴之间的同时开始/停止进行同步控制。此外,连接的同步控制线缆,多可进行16块(128个轴)的同步控制。使用8轴接口板时,还可以4轴为单位分组。
限位输出
限位输出其实就是用来检测电机的停止点、减速点和原点,通过反馈信号实现高精度定位控制,防止设备过冲或超出安全范围运行,确保系统动作精准可靠。
+SD / -SD(方向减速)
就是在电机接近运动范围的某个方向极限时,提前触发信号让电机慢下来(减速),以防止过冲或撞到限位点。
ORG(原点限位)的作用
- 归零点:ORG是电机或者机械设备的“归零点”,用于校准和初始化设备的位置。
————比如,数控机床开机时,需要找到“原点”,让设备知道刀具的初始位置。 - 定位基准:ORG是所有运动和定位的基准点。设备以原点为参考来计算后续的绝对位置。
- 复位操作:在发生故障或重启时,通过返回原点(回原点操作)来让设备恢复到一个已知的状态,避免偏移或误差累积。
PTP动作
PTP动作(Point-to-Point Motion),用简单来说,就是让电机或者机械臂从一个点移动到另一个点,而不在意它怎么走过去,只要到达目标点就行。这种运动模式追求快速和高效,而不是轨迹的精确控制。
JOG动作
JOG动作(Jogging Motion),用简单话来说,就是点动操作,让电机或者机械设备以连续、低速、可控的方式移动。通常用在调试、测试或设备微调时。电机从起始速度开始运行,加速至最大速度后连续运动;只有当接收到停止指令或外部停止信号后,才减速停止。连续运动指令其实就是速度控制指令。
ORG动作
ORG(原点复位)动作是使电机移动到原点的动作。
运动控制分类
根据有无反馈和如何反馈可以分为开环控制系统、闭环控制系统和半闭环控制系统三类。
-
开环控制系统:
是一种没有反馈机制的控制系统,它根据预设指令执行操作而不监测或调整输出结果。这种系统的设计基于一个假设:系统的输入与预期输出之间存在确定的关系,并且在运行过程中不会受到外部干扰或变化的影响。 -
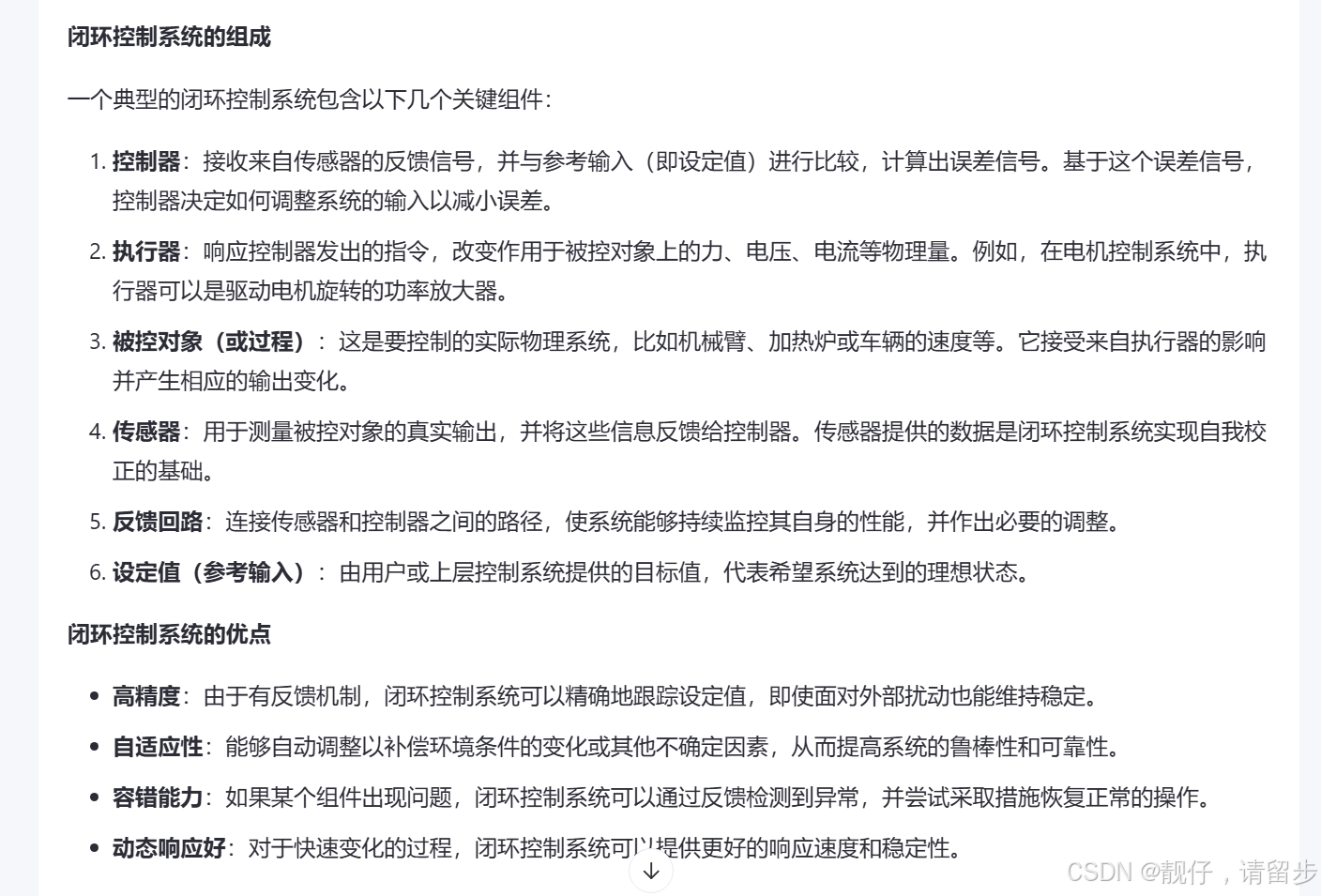
闭环控制系统(也称为反馈控制系统):是一种通过监测输出并与期望的设定值进行比较,然后根据差异调整输入来纠正偏差的系统。这种控制方式能够自动调节和优化系统的性能,确保输出尽可能接近所需的设定值,即使在存在干扰或不确定性的情况下也能保持良好的控制精度。
-
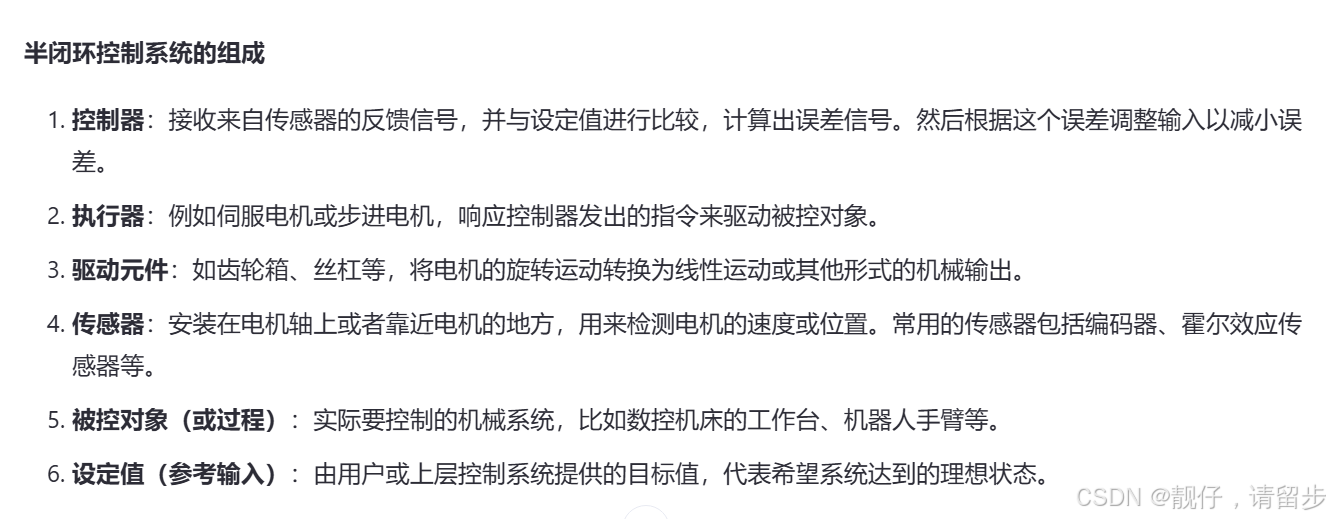
半闭环控制系统(也称为半封闭环控制系统):是一种介于开环控制系统和全闭环控制系统之间的控制方式。它通常用于运动控制系统中,特别是在需要高精度位置或速度控制的应用场景下。半闭环控制系统的主要特点是在执行器之后、但不在最终输出端之前进行反馈测量。这意味着传感器不是直接监测最终的机械输出(如工作台的实际位置),而是监测驱动元件的状态(如电机轴的位置或速度)。
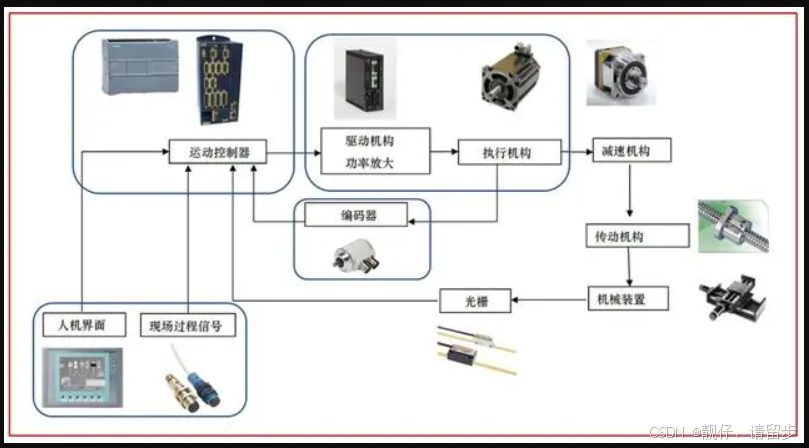
运动控制器
运动控制器是运动控制系统的核心部件,负责产生运动路径的控制指令,用于设备的逻辑控制,将运动参数分配给需要运动的轴,并对被控对象的外部环境变化及时做出响应。
通用运动控制器通常都提供一系列运动规划方法,基于对冲击、加速度和速度等这些可影响动态轨迹精度的量值加以限制,提供对运动控制过程的运动参数的设置和运动相关的指令,使其按预先规定的运动参数和规定的轨迹完成相应的动作。
运动控制器通过一定的通信手段将控制信号或命令发送给驱动器,驱动器为执行机构(通常为电机)提供转动能源动力,运动控制器接收并且分析反馈信号,得到跟随误差后,根据控制器的算法,产生减小误差的控制信号,从而提高了运动控制的精度。典型的控制器有下几类:PLC可编程逻辑控制器、专用的运动控制器。
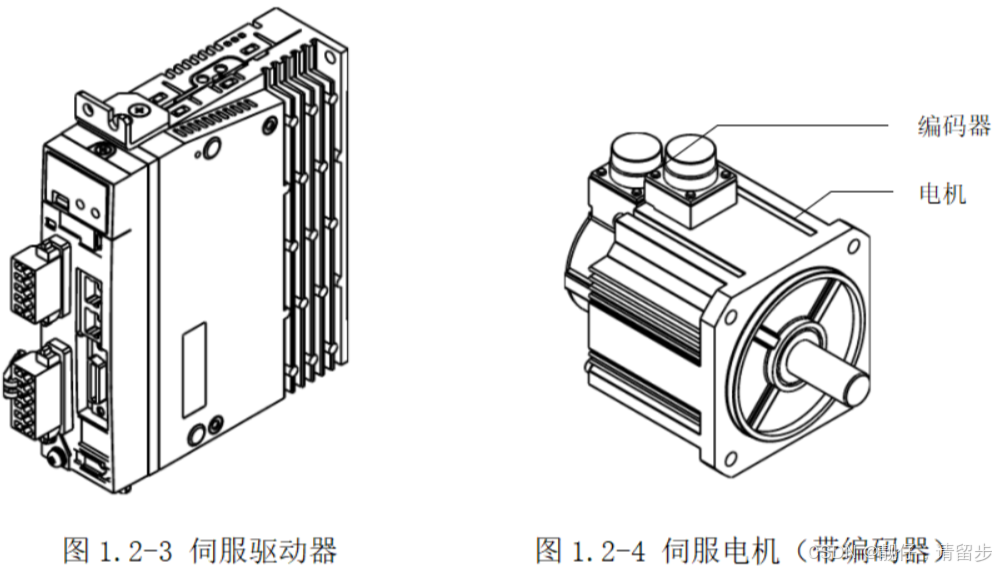
驱动器
驱动器是运动控制系统的转换装置,用于将来自运动控制器的控制信号转换为执行机构的运动,典型的驱动器如变频器、步进驱动器、伺服驱动器。
控制器产生的命令信号是微小信号,通过驱动器放大这些信号以满足电机的工作需求,故伺服驱动器(servo drives)又称为“伺服控制器”或“伺服放大器”,属于伺服系统的一部分,主要应用于高精度的定位系统。
伺服驱动器一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度传动系统的控制。尤其是应用于交流永磁同步电机控制的伺服驱动器已经成为国内广泛采用的产品。伺服驱动器的调速范围宽、精度高、可靠性高,还提供多种参数供用户调节。
步进驱动器是将接收到的运动指令转换为步进电机的角位移(对应步距角)的执行机构。通常情况下接收对应位移的脉冲信号时,当步进驱动器接收到一个脉冲信号,按设定的方向转动一个步距角,它的旋转是以固定的角度一步一步运行的。外部控制器可以通过控制脉冲个数来控制步进电机的角位移量,从而达到调速和定位的目的。步进系统被广泛应用于雕刻机、电脑绣花机、数控机床、包装机械、点胶机、切料送料系统、测量仪器等设备上。
执行机构
执行机构是运动控制系统中的控制对象,用于将驱动信号转换为位移、旋转等,执行机构通过一些机械机构连接,实现控制对象的运动。常见的执行机构如各种类型的电机、液压、启动设备。
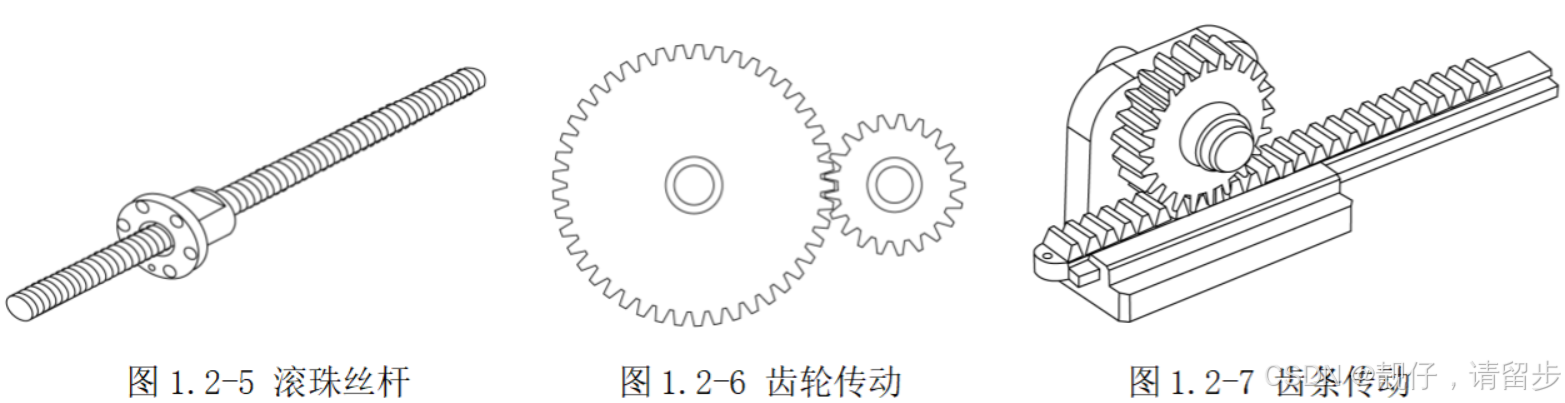
常见的传动机构有:滚珠丝杆、齿轮传动、齿条传动、带传动、丝杆传动,链传动、液压传动、气压传动等。
电机主要分为步进电机和伺服电机,二者的控制方式不同,步进电机通过控制脉冲的个数控制转动角度的,一个脉冲对应一个步距角。伺服电机通过控制定子电角度的旋转,带动转子的旋转,并经过编码器的反馈构成闭环,从定位到目标角度。伺服电机运行平稳,还具有较强的过载能力,各方面性能优于步进电机。
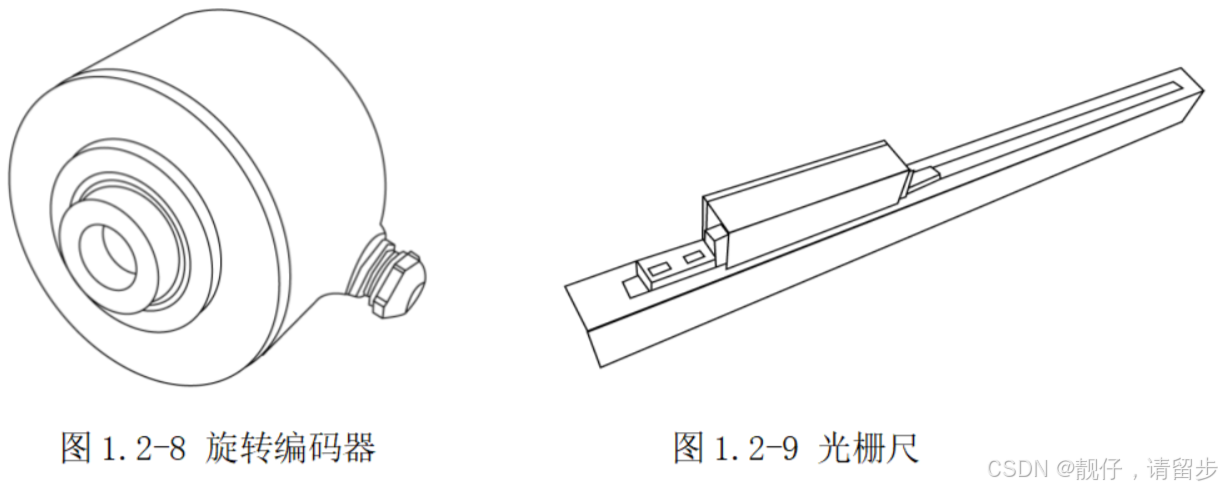
反馈装置
反馈装置是运动控制系统中进行检测并处理反馈的装置,主要反馈的是负载的位置和速度,例如编码器、光栅尺等,编码器是一种非常常见的反馈装置。伺服电机一般自带编码器,如图1.2-4左侧模块,编码器用于反馈电机的实际运行情况,例如电机的当前位置和速度。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









