







一、高斯光束的理论公式
- 光强分布
高斯光束在横截面上的光强分布为:
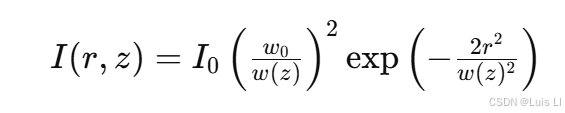
其中:
- I0:束腰处的最大光强。
- r:离光轴的径向距离。
- w(z):在距离 zzz 处的光斑半径。
- w0:束腰处的最小光斑半径。
- 光斑半径变化
光斑半径随传播距离的变化为:
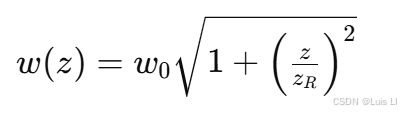
其中,瑞利长度 Zr定义为:
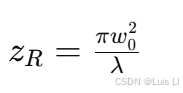
λ为光的波长。
- 相位分布
高斯光束的相位分布为:

其中:
- k=2π/λ:波数。
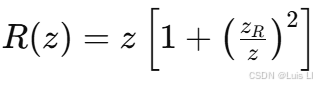 :波前曲率半径。
:波前曲率半径。
二、大气衰减的朗伯定律
当光束在大气中传播时,光强按照朗伯定律呈指数衰减:

其中:
- α:大气衰减系数。
- I0:入射光强。
- z:传播距离。
三、模型的建立与线性化
- 综合模型
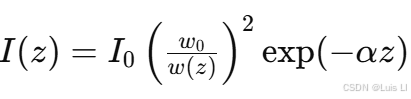
结合高斯光束的传播特性和大气衰减,得到光强随距离的综合模型:
- 模型线性化
为了使用最小二乘法,需要将模型线性化。取自然对数:

如果在束腰附近,![]() ,则:
,则:

这样,模型变为关于 z的线性关系。
四、最小二乘法拟合
- 数据准备
- 测量:在不同距离 zi处测量光强 Ii。
- 线性化:
- 建立线性方程
![]()
- 计算最小二乘解
目标是最小化残差平方和:


% 参数设定
w0 = 1e-3; % 光束束腰半径 (m)
lambda = 6.328e-9; % 波长 (m)
zR = pi * w0^2 / lambda; % 瑞利长度 (m)
alpha_true = 0.01; % 大气衰减系数 (1/m)
I0 = 1; % 入射光强
% 生成距离数据
z = linspace(0, 50, 100); % 传播距离 (m)
% 计算光斑半径
w_z = w0 * sqrt(1 + (z / zR).^2);
% 计算接收光强
I_z = I0 * (w0 ./ w_z).^2 .* exp(-alpha_true * z);
% 加入测量噪声
noise_level = 0.05; % 噪声水平
I_z_noisy = I_z .* (1 + noise_level * randn(size(I_z)));
% 数据线性化
y = log(I_z_noisy);
% 最小二乘法拟合
p = polyfit(z, y, 1);
alpha_fit = -p(1);
ln_I0_fit = p(2);
% 绘制结果
figure;
scatter(z, y, 'b', 'DisplayName', '测量数据');
hold on;
plot(z, polyval(p, z), 'r-', 'DisplayName', '线性拟合');
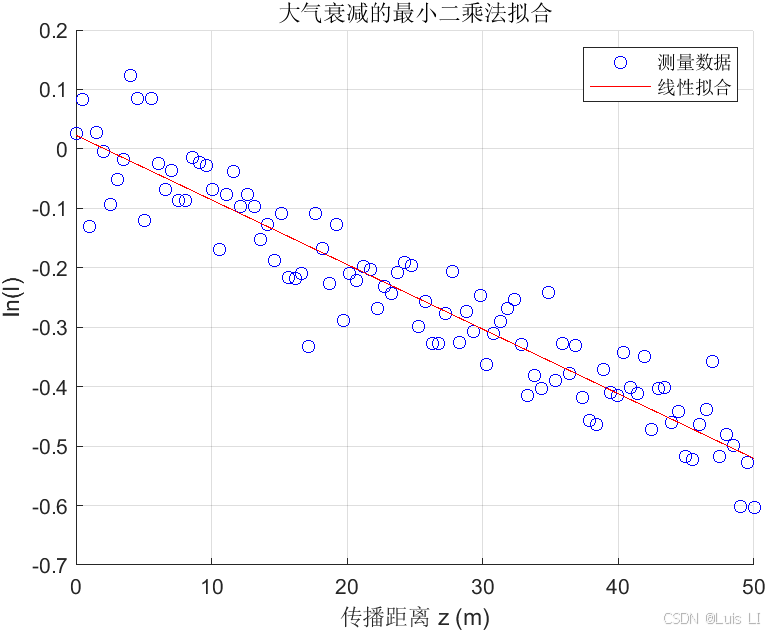
xlabel('传播距离 z (m)');
ylabel('ln(I)');
title('大气衰减的最小二乘法拟合');
legend;
grid on;
% 显示拟合结果
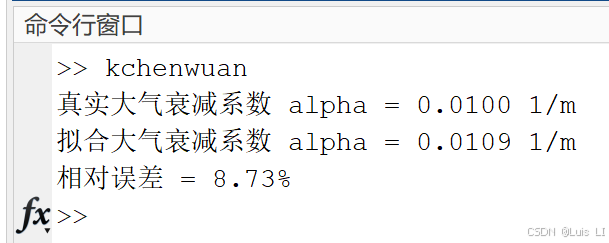
fprintf('真实大气衰减系数 alpha = %.4f 1/m\n', alpha_true);
fprintf('拟合大气衰减系数 alpha = %.4f 1/m\n', alpha_fit);
fprintf('相对误差 = %.2f%%\n', abs((alpha_fit - alpha_true) / alpha_true * 100));
六、结果分析
- 拟合精度:通过比较拟合得到的α 和真实值,可以评估拟合的准确性。
- 误差来源:噪声、模型近似(忽略 w(z)的变化)都会影响结果。
- 改进方法:若发现误差较大,可考虑非线性拟合,或者在模型中保留w(z) 的变化。
七、注意事项
-
模型精确性:当传播距离较大时,不能忽略w(z) 对光强的影响,需使用非线性拟合方法。
-
数据质量:实验数据的准确性直接影响拟合结果,需确保光功率计和测距仪的精度。
-
环境因素:大气参数可能随环境变化(如湿度、温度),在实验中应尽量控制或记录这些因素。
-
Matlab仿真:代码中参数可根据实际情况调整,注意单位一致性。
八、总结
通过结合高斯光束的传播特性和大气衰减的朗伯定律,我们建立了光强随传播距离变化的数学模型。利用最小二乘法对模拟数据进行了拟合,成功估计了大气衰减系数。该仿真过程不仅验证了理论模型,也为实际实验的数据处理和分析提供了参考。
MWORK代码(清除注释%,更换为#,注意单双引号)
% 参数设定
w0 = 1e-3; % 光束束腰半径 (m)
lambda = 532e-9; % 波长 (m)
zR = pi * w0^2 / lambda; % 瑞利长度 (m)
alpha_true = 0.01; % 大气衰减系数 (1/m)
I0 = 1; % 入射光强
% 生成距离数据
z = linspace(0, 50, 100); % 传播距离 (m)
% 计算光斑半径
w_z = w0 * sqrt(1 + (z / zR).^2);
% 计算接收光强
I_z = I0 * (w0 ./ w_z).^2 .* exp(-alpha_true * z);
% 加入测量噪声
noise_level = 0.05; % 噪声水平
I_z_noisy = I_z .* (1 + noise_level * randn(size(I_z)));
% 数据线性化
y = log(I_z_noisy);
% 最小二乘法拟合
p = polyfit(z, y, 1);
alpha_fit = -p(1);
ln_I0_fit = p(2);
% 绘制结果
figure;
scatter(z, y, 'b', 'DisplayName', '测量数据');
hold on;
plot(z, polyval(p, z), 'r-', 'DisplayName', '线性拟合');
xlabel('传播距离 z (m)');
ylabel('ln(I)');
title('大气衰减的最小二乘法拟合');
legend('show');
grid on;
% 显示拟合结果
fprintf('真实大气衰减系数 alpha = %.4f 1/m\n', alpha_true);
fprintf('拟合大气衰减系数 alpha = %.4f 1/m\n', alpha_fit);
fprintf('相对误差 = %.2f%%\n', abs((alpha_fit - alpha_true) / alpha_true * 100));


















 3528
3528

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









