






DS1302芯片是CT107D单片机中一个结构相对简单的一个模块,但是通过它就可以实现实时时钟的功能。
电路结构
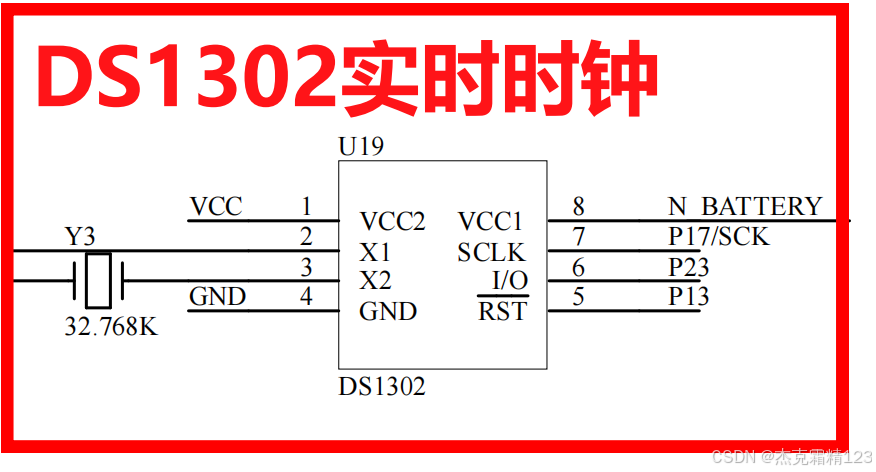
如图,我们先将看到左方,重点看到2,3管脚链接的晶振,32.768K的频率使得DS1302能够以秒的时间计算。然后8号管脚连接了电池,但是CT107D不存在独立电池供它使用所以,单片机一旦断电它也会停止工作。7号管脚连接的是串行时钟,同时与P17连接。6号管脚与P23口连接,这个实现IO口的双向通讯。5号管脚连接P13口实现控制通讯。所以总体看到DS1302就是通过三个管脚进行通讯。
DS1302特性
这里引用用户手册的内容。
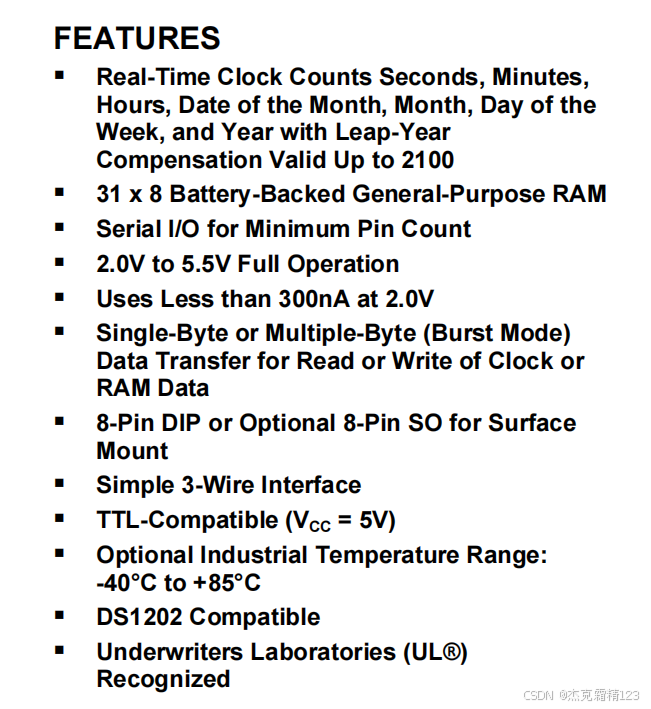
提取几个重要内容:
- 1 实时时钟:计时秒分时,日月年(包括闰年),但是年份至多计算到2100年。
- 2 31字节的寄存器
- 3 串行IO口
- 4 工作电压2~5V
- 6 单字节或多字节(突发模式)传输,可用于读写寄存器
- 8 三线通信接口(三线SPI协议)
- 10 工作温度-40~85℃
地址与指令
DS1302的使用需要通过确定的指令操作。这里是DS1302的地址/指令表。
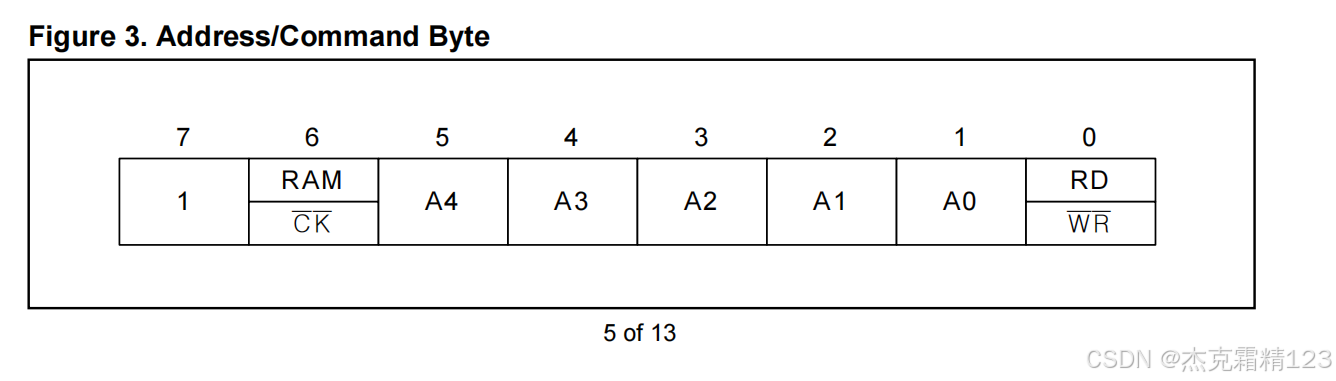
最高位控制DS1302的工作,置为1工作,置为0停止;第6位控制寄存器/时钟,置为1访问寄存器,置为0访问时钟;中间A4~A0则是对应寄存器地址;最低位控制读写,置为1是读操作,置为0是写操作。
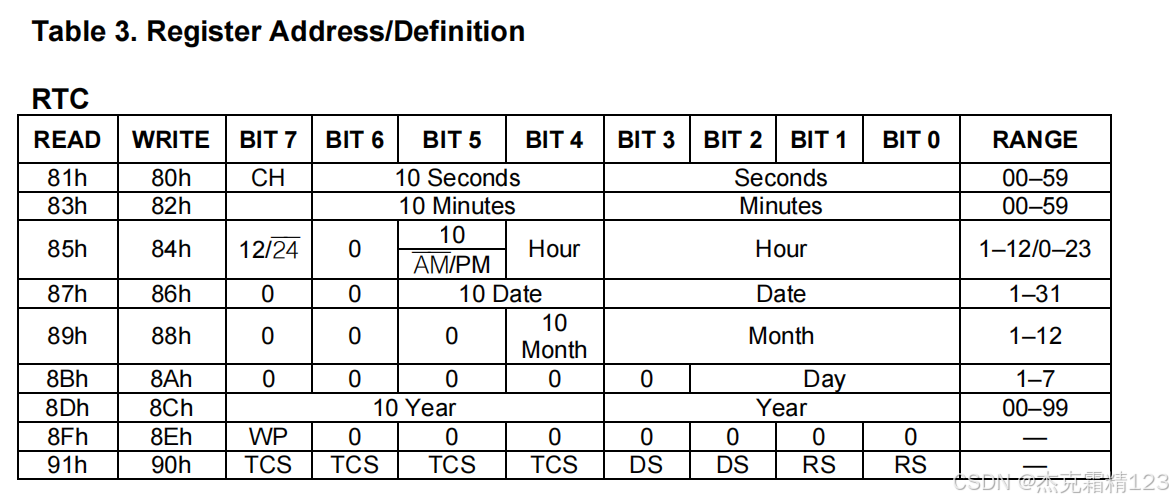
上图是对应各种读写操作的指令表,以及数据流的数据结构。图的内容较多,但是醒目这里不过多赘述。
SPI协议
DS1302芯片的数据交换依靠SPI协议执行。但是SPI协议相对单总线等是相对简单的。这里展示SPI协议的时序图。
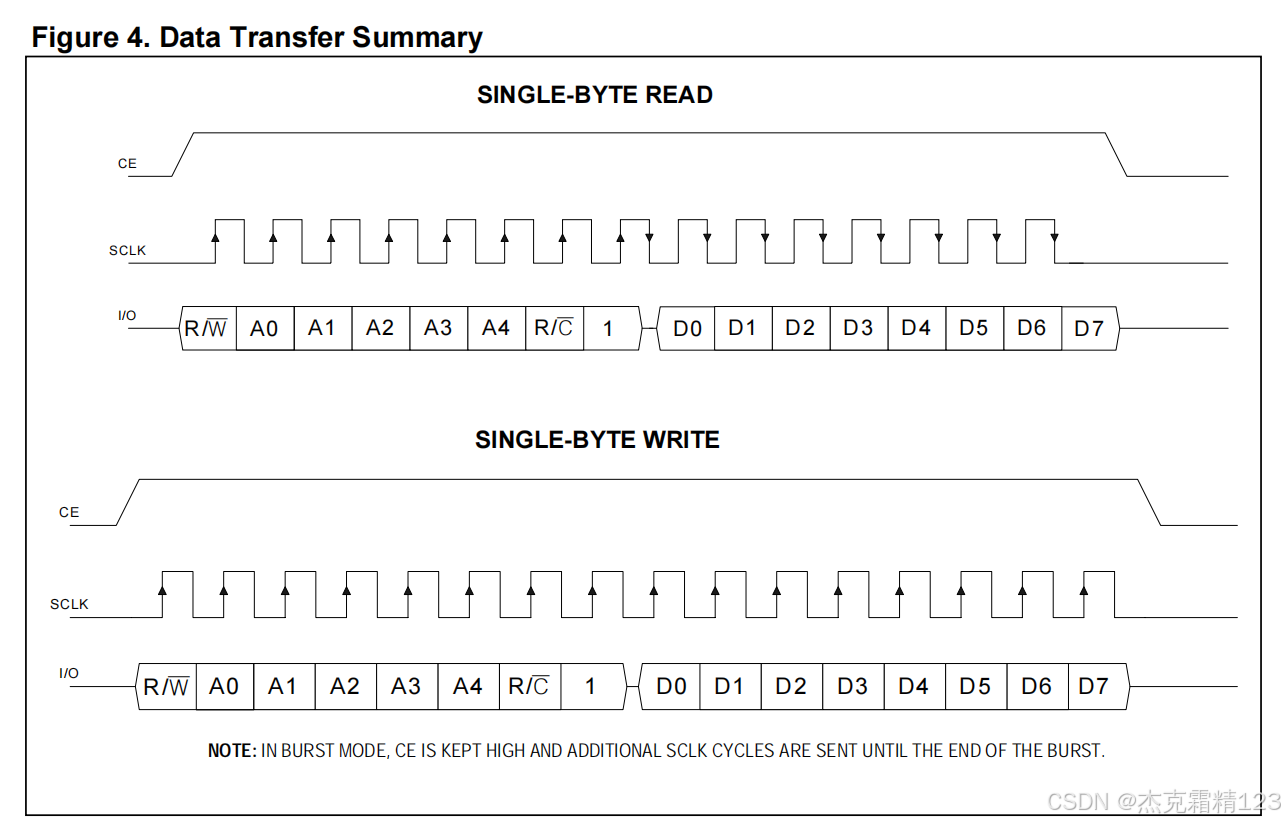
上图展示了读写操作的时序图。 我们能够看到读写单字节不同之处在与读操作读取下降冲激,写操作读取上升冲激。前半段相同,因为是上文提到的的控制指令。各个位的数据可以参照读写操作的指令表的数据结构。
代码操作
上文将基本内容罗列出来就可以看懂代码了。
1.写操作
sbit SCK = P17;
sbit SDA = P23;
sbit RST = P13;
void vWrite_Ds1302_Byte(unsigned char temp)
{
unsigned char i;
for (i=0;i<8;i++)
{
SCK=0;
SDA=temp&0x01;
temp>>=1;
SCK=1;
}
}
void vWrite_Ds1302( unsigned char address,unsigned char dat )
{
RST=0;
_nop_();
SCK=0;
_nop_();
RST=1;
_nop_();
vWrite_Ds1302_Byte(address);
vWrite_Ds1302_Byte(dat);
RST=0;
}2.读操作
unsigned char ucRead_Ds1302 ( unsigned char address )
{
unsigned char i,temp=0x00;
RST=0;
_nop_();
SCK=0;
_nop_();
RST=1;
_nop_();
vWrite_Ds1302_Byte(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0;
_nop_();
RST=0;
SCK=0;
_nop_();
SCK=1;
_nop_();
SDA=0;
_nop_();
SDA=1;
_nop_();
return (temp);
}3.进制转换,因为读出来的数据是16进制,如果要显示到数码管,那就要转换成10进制,同样的,我们要写入的也是16进制数,所以也要将我门常用的10进制数转化一下。我们可以通过宏定义来解决。
#define DecToBCD(dec) (dec/10*16)+(dec%10)
#define BCDToDec(bcd) (bcd/16*10)+(bcd%16)4.程序范例(因为它能开发的操作很多所以这里只做时分秒的示范)
#include <STC15F2K60S2.H>
void vDevice_Ctrl(unsigned char p0,unsigned char p2)
{
P0 = p0;
P2 = P2&0x1f|p2; //与运算0x1f是为了保证iic通讯的正常
P2 &= 0x1f;
}
void vSystem_Init()
{
vDevice_Ctrl(0x00,0xa0);
vDevice_Ctrl(0xff,0x80);
vDevice_Ctrl(0xff,0xe0);
}
unsigned char smg_code[10]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F};
unsigned char smg_ctrl[8]={0x01,0x02,0x04,0x08,0x10,0x20,0x040,0x80};
unsigned char smg_buf[8];
unsigned char second,minute,hour;
void ReadRTC()
{
second = BCDToDec(ucRead_Ds1302(0x81));
minute = BCDToDec(ucRead_Ds1302(0x83));
hour = BCDToDec(ucRead_Ds1302(0x85));
}
void SMG_process()
{
smg_buf[0] = smg_code[hour/10];
smg_buf[1] = smg_code[hour%10]|0x80;
smg_buf[2] = smg_code[minute/10];
smg_buf[3] = smg_code[minute%10]|0x80;
smg_buf[4] = smg_code[second/10];
smg_buf[5] = smg_code[second%10];
}
void vTimer2_Init()
{
AUXR |= 0x04; //定时器时钟1T模式
T2L = 0x20; //设置定时初始值
T2H = 0xD1; //设置定时初始值
AUXR |= 0x10; //定时器2开始计时
IE2 |= 0x04; //定时器2中断
EA = 1; //开启总中断
}
void SMG_display()
{
static unsigned char smg_i;
vDevice_Ctrl(0x00,0xe0);
vDevice_Ctrl(~smg_buf[smg_i],0xe0);
vDevice_Ctrl(smg_ctrl[smg_i],0xc0);
smg_i = (smg_i+1)%8;
}
void main()
{
vSystem_Init();
SetRTC(12,45,20);//12时45分20秒作为起始
vTimer2_Init();
while(1)
{
ReadRTC();
SMG_process();
}
}
void Timer2_IRC() interrupt 12
{
SMG_display();
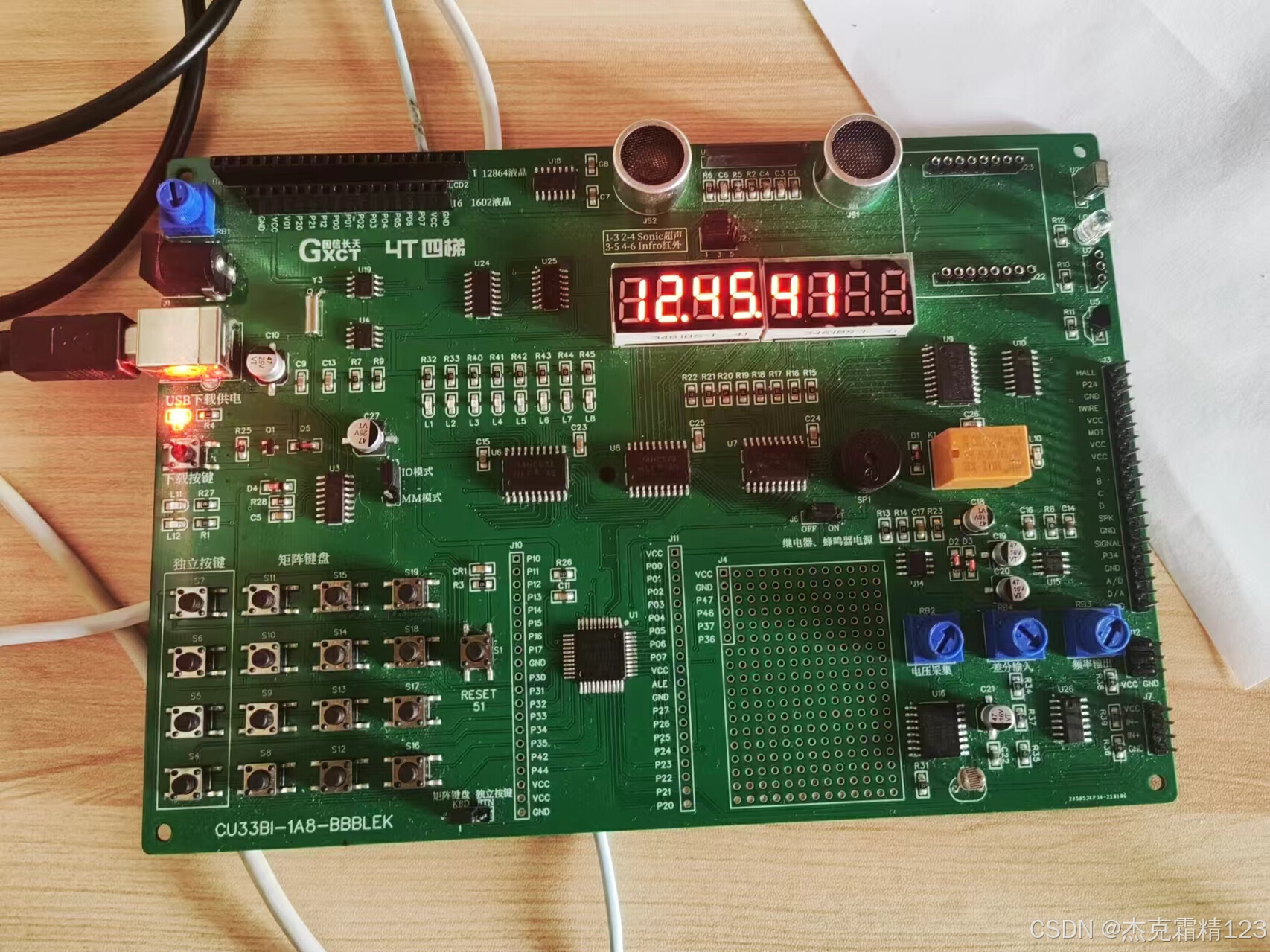
}预期结果

















 4017
4017

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









