






#include"stdio.h"
#include"gd32f30x.h"
#include"keydiver.h"
#include "systick.h"
unsigned short intervals[6];
unsigned short ratiovals[6];
dma_parameter_struct dmacfg1;
dma_parameter_struct dmacfg2;
int a=0;
int t,r;
void pwm_init(){
rcu_periph_clock_enable(RCU_TIMER1);
timer_parameter_struct timercfg;
timercfg.prescaler = 12U;//5k
timercfg.alignedmode = TIMER_COUNTER_EDGE;
timercfg.counterdirection = TIMER_COUNTER_UP;
timercfg.period = 5U;
timercfg.clockdivision = TIMER_CKDIV_DIV1;
timercfg.repetitioncounter = 0U;
timer_init(TIMER1,&timercfg);
timer_oc_parameter_struct pwmcfg;
pwmcfg.outputstate = (uint16_t)TIMER_CCX_ENABLE;
pwmcfg.ocpolarity = TIMER_OC_POLARITY_HIGH;
pwmcfg.ocidlestate = TIMER_OC_IDLE_STATE_LOW;
timer_channel_output_config(TIMER1,TIMER_CH_1,&pwmcfg);
timer_channel_output_mode_config(TIMER1,TIMER_CH_1,TIMER_OC_MODE_PWM0);
//
timer_channel_output_pulse_value_config(TIMER1,TIMER_CH_1,25000U);
rcu_periph_clock_enable(RCU_GPIOA);
gpio_deinit(RCU_GPIOA);
gpio_init(GPIOA,GPIO_MODE_AF_PP,GPIO_OSPEED_50MHZ,GPIO_PIN_1);
timer_enable(TIMER1);
}
void pwm_capture(){
rcu_periph_clock_enable(RCU_TIMER0);
timer_parameter_struct timercfg;
timercfg.prescaler = 1U-1;//5k
timercfg.alignedmode = TIMER_COUNTER_EDGE;
timercfg.counterdirection = TIMER_COUNTER_UP;
timercfg.period = 65536U-1;
timercfg.clockdivision = TIMER_CKDIV_DIV1;
timercfg.repetitioncounter = 0U;
timer_init(TIMER0,&timercfg);
timer_ic_parameter_struct inputcfg;
inputcfg.icpolarity = TIMER_IC_POLARITY_RISING;
inputcfg.icselection = TIMER_IC_SELECTION_DIRECTTI;
inputcfg.icprescaler = TIMER_IC_PSC_DIV1;
inputcfg.icfilter = 0U;
timer_input_capture_config(TIMER0,TIMER_CH_0,&inputcfg);
inputcfg.icpolarity = TIMER_IC_POLARITY_FALLING;
inputcfg.icselection = TIMER_IC_SELECTION_INDIRECTTI;
timer_input_capture_config(TIMER0,TIMER_CH_1,&inputcfg);
rcu_periph_clock_enable(RCU_GPIOA);
gpio_init(GPIOA,GPIO_MODE_IN_FLOATING,GPIO_OSPEED_50MHZ,GPIO_PIN_8);
// timer_interrupt_enable(TIMER0,TIMER_INT_CH0);
// timer_interrupt_enable(TIMER0,TIMER_INT_CH1);
// timer_interrupt_enable(TIMER0,TIMER_INT_UP);
// timer_interrupt_flag_clear(TIMER0,TIMER_INT_FLAG_CH0);
// timer_interrupt_flag_clear(TIMER0,TIMER_INT_FLAG_CH1);
// timer_interrupt_flag_clear(TIMER0,TIMER_INT_FLAG_UP);
// nvic_irq_enable(TIMER0_UP_IRQn,1,2);
// nvic_irq_enable(TIMER0_Channel_IRQn,2,2);
timer_dma_enable(TIMER0,TIMER_DMA_CH0D);
timer_dma_enable(TIMER0,TIMER_DMA_CH1D);
rcu_periph_clock_enable(RCU_DMA0);
dmacfg1.periph_addr = TIMER0+0x34;
dmacfg1.periph_width = DMA_PERIPHERAL_WIDTH_16BIT;
dmacfg1.periph_inc = DMA_PERIPH_INCREASE_DISABLE;
dmacfg1.memory_addr = (uint32_t)intervals;
dmacfg1.memory_width = DMA_MEMORY_WIDTH_16BIT;
dmacfg1.memory_inc = DMA_MEMORY_INCREASE_ENABLE;
dmacfg1.number = 6U;
dmacfg1.direction = DMA_PERIPHERAL_TO_MEMORY;
dmacfg1.priority = DMA_PRIORITY_LOW;
dma_init(DMA0,DMA_CH1,&dmacfg1);
dmacfg2.periph_addr = TIMER0+0x34;
dmacfg2.periph_width = DMA_PERIPHERAL_WIDTH_16BIT;
dmacfg2.periph_inc = DMA_PERIPH_INCREASE_DISABLE;
dmacfg2.memory_addr = (uint32_t)ratiovals;
dmacfg2.memory_width = DMA_MEMORY_WIDTH_16BIT;
dmacfg2.memory_inc = DMA_MEMORY_INCREASE_ENABLE;
dmacfg2.number = 6U;
dmacfg2.direction = DMA_PERIPHERAL_TO_MEMORY;
dmacfg2.priority = DMA_PRIORITY_LOW;
dma_init(DMA0,DMA_CH1,&dmacfg1);
}
volatile unsigned long overcnt=0;
volatile unsigned long intervalcnt=0;
volatile unsigned long ratialcnt=0;
volatile unsigned long intervalcnt0=0;
volatile unsigned long ratialcnt0=0;
volatile unsigned long state=0;
void TIMER0_channel_IRQHandler(){
if(timer_interrupt_flag_get(TIMER0,TIMER_INT_FLAG_CH0)){
timer_disable(TIMER0);
timer_interrupt_flag_clear(TIMER0,TIMER_INT_FLAG_CH0);
timer_counter_value_config(TIMER0,0);
intervalcnt=overcnt+timer_channel_capture_value_register_read(TIMER0,TIMER_CH_0);
intervalcnt0=intervalcnt;
overcnt=0;
timer_counter_value_config(TIMER0,0);
timer_enable(TIMER0);
}
if(timer_interrupt_flag_get(TIMER0,TIMER_INT_FLAG_CH1)){
timer_interrupt_flag_clear(TIMER0,TIMER_INT_FLAG_CH1);
ratialcnt=overcnt+timer_channel_capture_value_register_read(TIMER0,TIMER_CH_0);
}
}
void TIMER0_UP_IRQHandler(){
if(timer_interrupt_flag_get(TIMER0,TIMER_INT_FLAG_UP)){
timer_interrupt_flag_clear(TIMER0,TIMER_INT_FLAG_UP);
overcnt+=50000U;
}
}
void TIMER0_Channel_IRQHandler(){
if(timer_interrupt_flag_get(TIMER0,TIMER_INT_FLAG_UP)){
timer_interrupt_flag_clear(TIMER0,TIMER_INT_FLAG_UP);}
}
int main()
{
pwm_init();
pwm_capture();
while(1){
dma_channel_disable(DMA0,DMA_CH1);
dma_channel_disable(DMA0,DMA_CH2);
timer_disable(TIMER0);
dma_init(DMA0,DMA_CH1,&dmacfg1);
dma_init(DMA0,DMA_CH2,&dmacfg2);
timer_counter_value_config(TIMER0,0);
timer_enable(TIMER0);
while(!dma_flag_get(DMA0,DMA_CH2,DMA_FLAG_FTF));
while(!dma_flag_get(DMA0,DMA_CH1,DMA_FLAG_FTF));
dma_flag_clear(DMA0,DMA_CH2,DMA_FLAG_FTF);
dma_flag_clear(DMA0,DMA_CH1,DMA_FLAG_FTF);
t=intervals[5]-intervals[4];
r=ratiovals[5]-intervals[5];
if(r>t){r-=t;}
if(r<0){r+=t;}
a=1;
}
}使用dma,上升沿触发通道0,给到内存,下降沿触发通道1,给到内存中,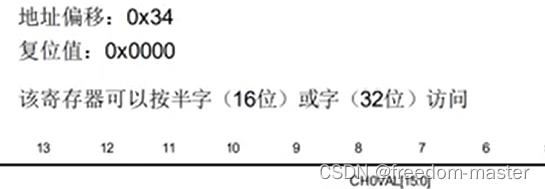
找到通道0的地址
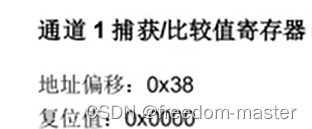
通道1的地址
有可能下降沿先发生,所以要先判断一下,然后将得到的两个时刻相减,进而求出周期和占空比。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









