







 本文介绍了使用Webots进行机器人仿真、ROSQT实现人机交互、SolidWorks模型导出urdf、ROS机械臂开发框架、边缘计算技术的应用,以及如何结合MATLAB和ROS进行联合仿真,还探讨了ROS中集成AI模型库和语音交互功能。
本文介绍了使用Webots进行机器人仿真、ROSQT实现人机交互、SolidWorks模型导出urdf、ROS机械臂开发框架、边缘计算技术的应用,以及如何结合MATLAB和ROS进行联合仿真,还探讨了ROS中集成AI模型库和语音交互功能。
机器人开发简要
前言
我创作这篇博客的目的是记录学习技术过程中的笔记。希望通过分享自己的学习经历,能够帮助到那些对相关领域感兴趣或者正在学习的人们。
1.Webots作为地表最强的通用型机器人仿真神器
2.ROS QT实现人机交互界面
3.SolidWorks模型导出urdf(统一机器人描述格式)
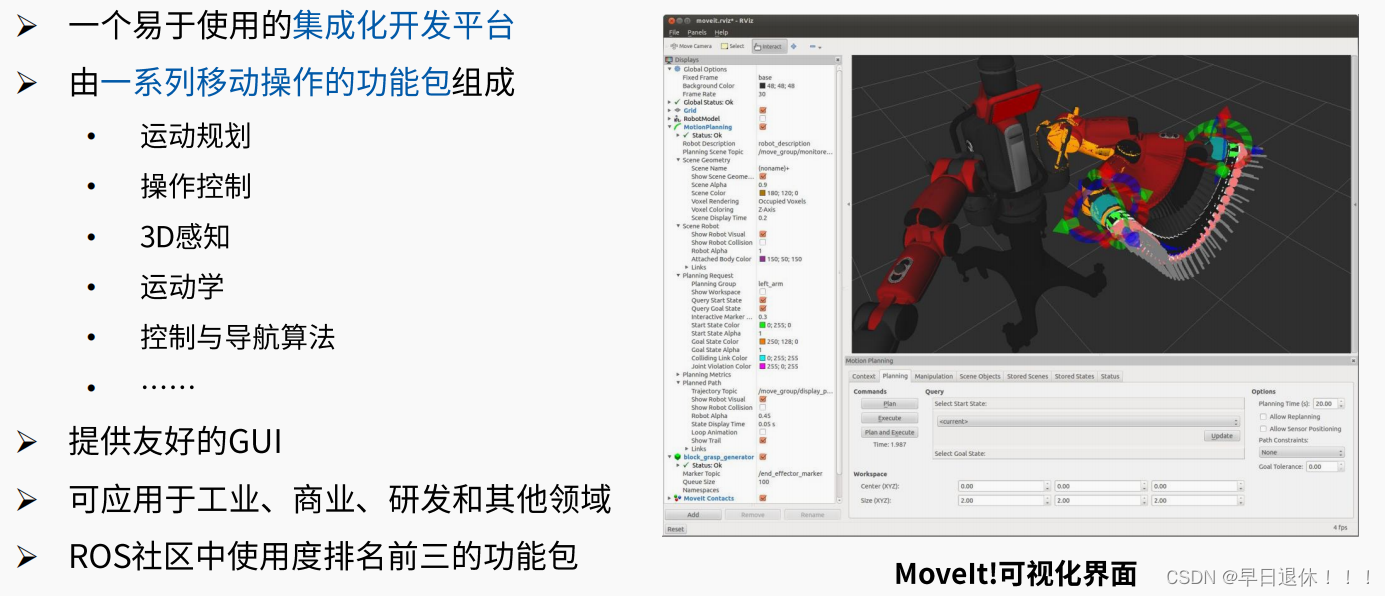
4.ROS机械臂开发框架——Movelt
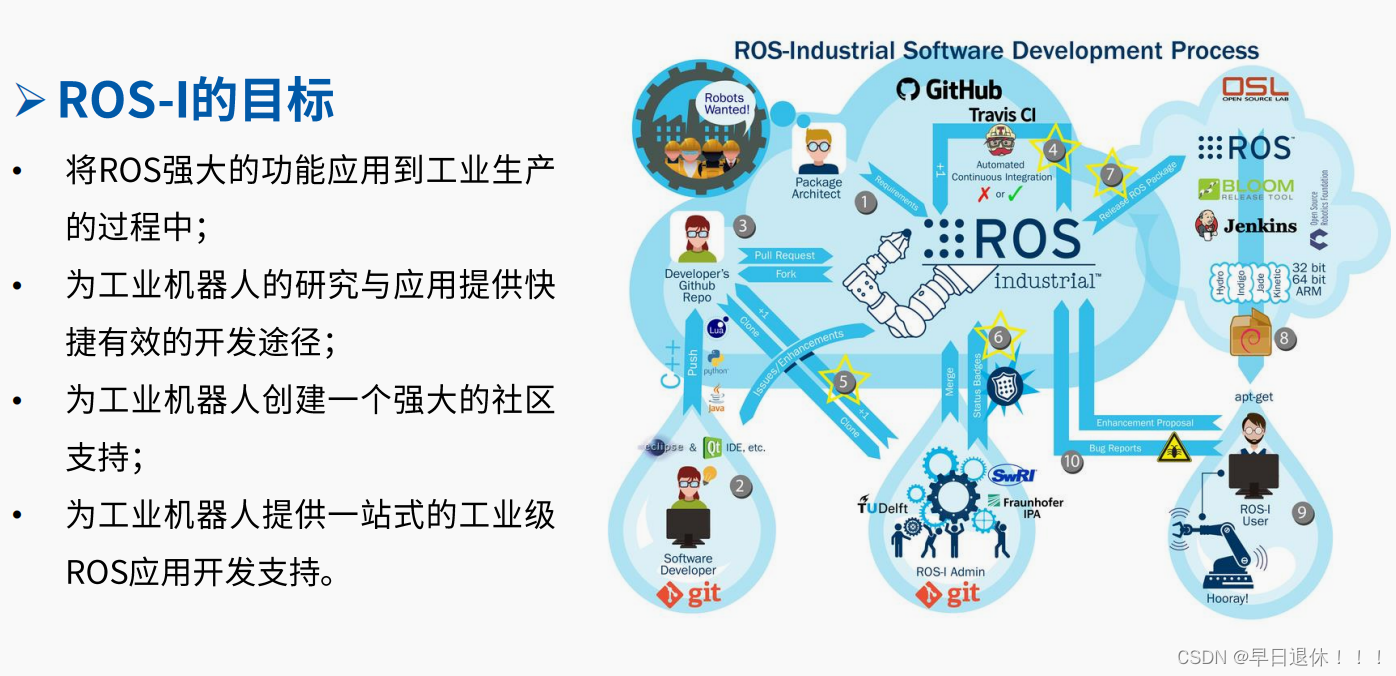
5.ROS-I框架
6.将英特尔神经计算棒2代与树莓派结合,部署人工智能和计算机视觉的边缘计算应用
7.在ROS中集成讯飞SDK实现语音交互
8.ROS人机交互界面
- 在ROS环境下利用QtCreator工具开发一款人机交互软件,包括librviz库开发、速度仪表盘显示、订阅并显示图像话题等功能的实现。在Qt中订阅与发布ROS的话题,并将ROS的话题消息在Qt中进行可视化显示。
9.MATLAB与ROS联合仿真

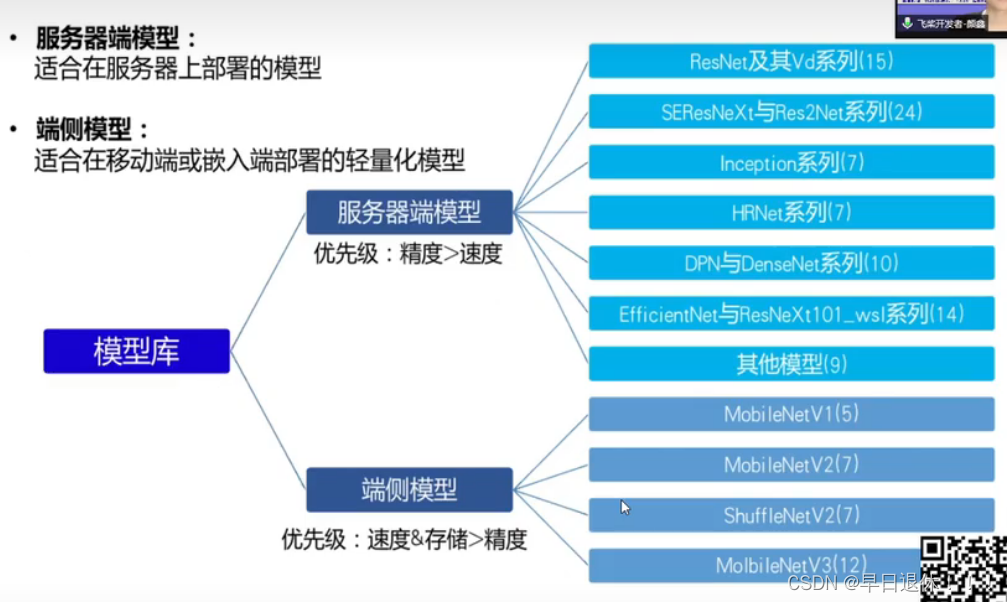
10.AI模型库


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









