







MacOS
pip3 install PPOCRLabel
pip3 install opencv-contrib-python-headless==4.2.0.32 # 如果下载过慢请添加"-i https://mirror.baidu.com/pypi/simple"
PPOCRLabel --lang ch # 启动
如果上述安装出现问题,可以参考3.6节 错误提示
1.2.2 本地构建whl包并安装
cd PaddleOCR/PPOCRLabel
python3 setup.py bdist_wheel
pip3 install dist/PPOCRLabel-1.0.2-py2.py3-none-any.whl -i https://mirror.baidu.com/pypi/simple
1.2.3 通过Python脚本运行PPOCRLabel
如果您对PPOCRLabel文件有所更改,通过Python脚本运行会更加方面的看到更改的结果
cd ./PPOCRLabel # 切换到PPOCRLabel目录
python PPOCRLabel.py --lang ch
2.1 操作步骤
-
安装与运行:使用上述命令安装与运行程序。
-
打开文件夹:在菜单栏点击 “文件” - “打开目录” 选择待标记图片的文件夹[1].
-
自动标注:点击 ”自动标注“,使用PPOCR超轻量模型对图片文件名前图片状态[2]为 “X” 的图片进行自动标注。
-
手动标注:点击 “矩形标注”(推荐直接在英文模式下点击键盘中的 “W”),用户可对当前图片中模型未检出的部分进行手动绘制标记框。点击键盘Q,则使用四点标注模式(或点击“编辑” - “四点标注”),用户依次点击4个点后,双击左键表示标注完成。
-
标记框绘制完成后,用户点击 “确认”,检测框会先被预分配一个 “待识别” 标签。
-
重新识别:将图片中的所有检测画绘制/调整完成后,点击 “重新识别”,PPOCR模型会对当前图片中的所有检测框重新识别[3]。
-
内容更改:双击识别结果,对不准确的识别结果进行手动更改。
-
确认标记:点击 “确认”,图片状态切换为 “√”,跳转至下一张。
-
删除:点击 “删除图像”,图片将会被删除至回收站。
-
导出结果:用户可以通过菜单中“文件-导出标记结果”手动导出,同时也可以点击“文件 - 自动导出标记结果”开启自动导出。手动确认过的标记将会被存放在所打开图片文件夹下的_Label.txt_中。在菜单栏点击 “文件” - "导出识别结果"后,会将此类图片的识别训练数据保存在_crop_img_文件夹下,识别标签保存在_rec_gt.txt_中[4]。
2.2 注意
[1] PPOCRLabel以文件夹为基本标记单位,打开待标记的图片文件夹后,不会在窗口栏中显示图片,而是在点击 “选择文件夹” 之后直接将文件夹下的图片导入到程序中。
[2] 图片状态表示本张图片用户是否手动保存过,未手动保存过即为 “X”,手动保存过为 “√”。点击 “自动标注”按钮后,PPOCRLabel不会对状态为 “√” 的图片重新标注。
[3] 点击“重新识别”后,模型会对图片中的识别结果进行覆盖。因此如果在此之前手动更改过识别结果,有可能在重新识别后产生变动。
[4] PPOCRLabel产生的文件放置于标记图片文件夹下,包括一下几种,请勿手动更改其中内容,否则会引起程序出现异常。
| 文件名 | 说明 |
| — | — |
| Label.txt | 检测标签,可直接用于PPOCR检测模型训练。用户每确认5张检测结果后,程序会进行自动写入。当用户关闭应用程序或切换文件路径后同样会进行写入。 |
| fileState.txt | 图片状态标记文件,保存当前文件夹下已经被用户手动确认过的图片名称。 |
| Cache.cach | 缓存文件,保存模型自动识别的结果。 |
| rec_gt.txt | 识别标签。可直接用于PPOCR识别模型训练。需用户手动点击菜单栏“文件” - "导出识别结果"后产生。 |
| crop_img | 识别数据。按照检测框切割后的图片。与rec_gt.txt同时产生。 |
3.1 快捷键
| 快捷键 | 说明 |
| — | — |
| Ctrl + shift + R | 对当前图片的所有标记重新识别 |
| W | 新建矩形框 |
| Q | 新建四点框 |
| Ctrl + E | 编辑所选框标签 |
| Ctrl + R | 重新识别所选标记 |
| Ctrl + C | 复制并粘贴选中的标记框 |
| Ctrl + 鼠标左键 | 多选标记框 |
| Backspace | 删除所选框 |
| Ctrl + V | 确认本张图片标记 |
| Ctrl + Shift + d | 删除本张图片 |
| D | 下一张图片 |
| A | 上一张图片 |
| Ctrl++ | 缩小 |
| Ctrl– | 放大 |
| ↑→↓← | 移动标记框 |
3.2 内置模型
-
默认模型:PPOCRLabel默认使用PaddleOCR中的中英文超轻量OCR模型,支持中英文与数字识别,多种语言检测。
-
模型语言切换:用户可通过菜单栏中 “PaddleOCR” - “选择模型” 切换内置模型语言,目前支持的语言包括法文、德文、韩文、日文。具体模型下载链接可参考PaddleOCR模型列表.
-
自定义模型:如果用户想将内置模型更换为自己的推理模型,可根据自定义模型代码使用,通过修改PPOCRLabel.py中针对PaddleOCR类的实例化,通过修改PPOCRLabel.py中针对PaddleOCR类的实例化) 实现,例如指定检测模型:
self.ocr = PaddleOCR(det=True, cls=True, use_gpu=gpu, lang=lang),在det_model_dir中传入 自己的模型即可。
3.3 导出标记结果
PPOCRLabel支持三种导出方式:
- 自动导出:点击“文件 - 自动导出标记结果”后,用户每确认过一张图片,程序自动将标记结果写入Label.txt中。若未开启此选项,则检测到用户手动确认过5张图片后进行自动导出。
默认情况下自动导出功能为关闭状态
-
手动导出:点击“文件 - 导出标记结果”手动导出标记。
-
关闭应用程序导出
3.4 导出部分识别结果
针对部分难以识别的数据,通过在识别结果的复选框中取消勾选相应的标记,其识别结果不会被导出。被取消勾选的识别结果在标记文件 label.txt 中的 difficult 变量保存为 True 。
注意:识别结果中的复选框状态仍需用户手动点击确认后才能保留
3.5 数据集划分
在终端中输入以下命令执行数据集划分脚本:
cd ./PPOCRLabel # 将目录切换到PPOCRLabel文件夹下
python gen_ocr_train_val_test.py --trainValTestRatio 6:2:2 --datasetRootPath …/train_data
参数说明:
-
trainValTestRatio是训练集、验证集、测试集的图像数量划分比例,根据实际情况设定,默认是6:2:2 -
datasetRootPath是PPOCRLabel标注的完整数据集存放路径。默认路径是PaddleOCR/train_data分割数据集前应有如下结构:
|-train_data
|-crop_img
|- word_001_crop_0.png
|- word_002_crop_0.jpg
|- word_003_crop_0.jpg
| …
| Label.txt
| rec_gt.txt
|- word_001.png
|- word_002.jpg
|- word_003.jpg
| …
3.6 错误提示
-
如果同时使用whl包安装了paddleocr,其优先级大于通过paddleocr.py调用PaddleOCR类,whl包未更新时会导致程序异常。
-
PPOCRLabel不支持对中文文件名的图片进行自动标注。
-
针对Linux用户:如果您在打开软件过程中出现**objc[XXXXX]**开头的错误,证明您的opencv版本太高,建议安装4.2版本:
pip install opencv-python==4.2.0.32
- 如果出现
Missing string id开头的错误,需要重新编译资源:
pyrcc5 -o libs/resources.py resources.qrc
- 如果出现
module 'cv2' has no attribute 'INTER_NEAREST'错误,需要首先删除所有opencv相关包,然后重新安装4.2.0.32版本的headless opencv
pip install opencv-contrib-python-headless==4.2.0.32
==================================================================
完成数据的标注就可以看是训练检测器了。找到Lable.txt,将其中一部分放到train_label.txt ,将一部分放到test_label.txt,将图片放到ppocr(这个文件夹的名字和标注时的图片文件夹的名字一致),如下:
/PaddleOCR/train_data/icdar2015/text_localization/
└─ ppocr/ 图片存放的位置
└─ train_label.txt icdar数据集的训练标注
└─ test_label.txt icdar数据集的测试标注
如果路径不存在,请手动创建。
然后下载预训练模型,将其放到pretrain_models文件夹中,命令如下:
根据backbone的不同选择下载对应的预训练模型
下载MobileNetV3的预训练模型
wget -P ./pretrain_models/ https://paddleocr.bj.bcebos.com/pretrained/MobileNetV3_large_x0_5_pretrained.pdparams
或,下载ResNet18_vd的预训练模型
wget -P ./pretrain_models/ https://paddleocr.bj.bcebos.com/pretrained/ResNet18_vd_pretrained.pdparams
或,下载ResNet50_vd的预训练模型
wget -P ./pretrain_models/ https://paddleocr.bj.bcebos.com/pretrained/ResNet50_vd_ssld_pretrained.pdparams
然后修改该config文件,路径: configs/det/det_mv3_db.yml,打开文件对里面的参数进行修改该。
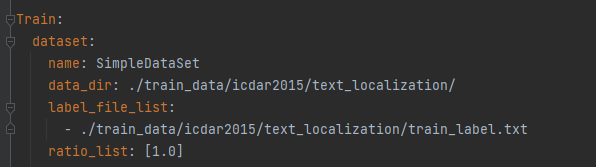
按照自己定义的路径,修改训练集的路径。
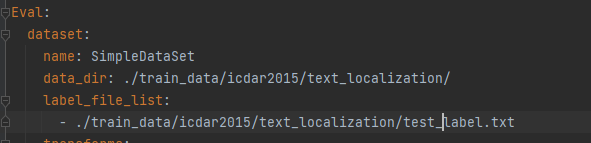
按照自己定义的路径,修改验证集的路径。
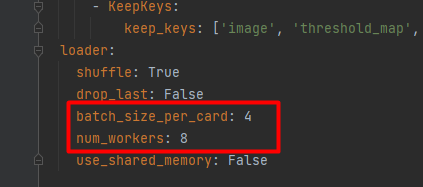
对BatchSize的修改。
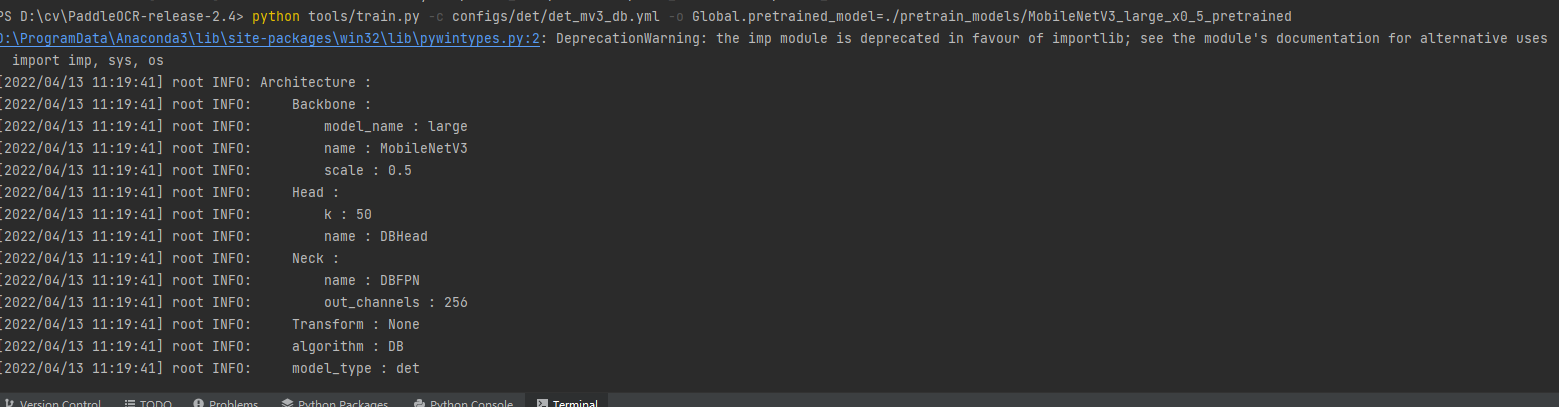
完成上面的工作就可以启动训练了,在pycharm的Terminal中输入命令:
注意:在PaddleOCR的根目录执行命令。
单机单卡训练 mv3_db 模型
python tools/train.py -c configs/det/det_mv3_db.yml -o Global.pretrained_model=./pretrain_models/MobileNetV3_large_x0_5_pretrained
更多的训练方式如下:
单机单卡训练 mv3_db 模型
python3 tools/train.py -c configs/det/det_mv3_db.yml \
-o Global.pretrained_model=./pretrain_models/MobileNetV3_large_x0_5_pretrained
单机多卡训练,通过 --gpus 参数设置使用的GPU ID
python3 -m paddle.distributed.launch --gpus ‘0,1,2,3’ tools/train.py -c configs/det/det_mv3_db.yml \
-o Global.pretrained_model=./pretrain_models/MobileNetV3_large_x0_5_pretrained
多机多卡训练,通过 --ips 参数设置使用的机器IP地址,通过 --gpus 参数设置使用的GPU ID
python3 -m paddle.distributed.launch --ips=“xx.xx.xx.xx,xx.xx.xx.xx” --gpus ‘0,1,2,3’ tools/train.py -c configs/det/det_mv3_db.yml \
-o Global.pretrained_model=./pretrain_models/MobileNetV3_large_x0_5_pretrained
==================================================================
在训练识别器之间,我们还有一步要做,就是将标注的数据裁剪出来。裁剪代码如下:
import json
import os
import numpy as np
import cv2
def get_rotate_crop_image(img, points):
‘’’
img_height, img_width = img.shape[0:2]
left = int(np.min(points[:, 0]))
right = int(np.max(points[:, 0]))
top = int(np.min(points[:, 1]))
bottom = int(np.max(points[:, 1]))
img_crop = img[top:bottom, left:right, :].copy()
points[:, 0] = points[:, 0] - left
points[:, 1] = points[:, 1] - top
‘’’
assert len(points) == 4, “shape of points must be 4*2”
求范数,得到宽度
img_crop_width = int(
max(
np.linalg.norm(points[0] - points[1]),
np.linalg.norm(points[2] - points[3])))
# 求范数,得到高度
img_crop_height = int(
max(
np.linalg.norm(points[0] - points[3]),
np.linalg.norm(points[1] - points[2])))
pts_std = np.float32([[0, 0], [img_crop_width, 0],
[img_crop_width, img_crop_height],
[0, img_crop_height]])
#计算得到转换矩阵
M = cv2.getPerspectiveTransform(points, pts_std)
#实现透视变换
dst_img = cv2.warpPerspective(
img,
M, (img_crop_width, img_crop_height),
borderMode=cv2.BORDER_REPLICATE,
flags=cv2.INTER_CUBIC)
dst_img_height, dst_img_width = dst_img.shape[0:2]
if dst_img_height * 1.0 / dst_img_width >= 1.5:
dst_img = np.rot90(dst_img)
return dst_img
自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数Python工程师,想要提升技能,往往是自己摸索成长或者是报班学习,但对于培训机构动则几千的学费,着实压力不小。自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年Python开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。



既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上Python开发知识点,真正体系化!
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新
如果你觉得这些内容对你有帮助,可以添加V获取:vip1024c (备注Python)

(1)Python所有方向的学习路线(新版)
这是我花了几天的时间去把Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。
最近我才对这些路线做了一下新的更新,知识体系更全面了。
(2)Python学习视频
包含了Python入门、爬虫、数据分析和web开发的学习视频,总共100多个,虽然没有那么全面,但是对于入门来说是没问题的,学完这些之后,你可以按照我上面的学习路线去网上找其他的知识资源进行进阶。
(3)100多个练手项目
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了,只是里面的项目比较多,水平也是参差不齐,大家可以挑自己能做的项目去练练。

间去把Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。
最近我才对这些路线做了一下新的更新,知识体系更全面了。
(2)Python学习视频
包含了Python入门、爬虫、数据分析和web开发的学习视频,总共100多个,虽然没有那么全面,但是对于入门来说是没问题的,学完这些之后,你可以按照我上面的学习路线去网上找其他的知识资源进行进阶。
(3)100多个练手项目
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了,只是里面的项目比较多,水平也是参差不齐,大家可以挑自己能做的项目去练练。















 850
850

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









