







 本文详细阐述了BitBake构建工具中校验和处理的复杂性,涉及WORKDIR的排除、run脚本的依赖计算、Python任务的依赖分析,以及如何通过sstate机制管理和加速构建过程。重点介绍了依赖关系的处理策略和签名生成方法,以保证构建的精确性和效率。
本文详细阐述了BitBake构建工具中校验和处理的复杂性,涉及WORKDIR的排除、run脚本的依赖计算、Python任务的依赖分析,以及如何通过sstate机制管理和加速构建过程。重点介绍了依赖关系的处理策略和签名生成方法,以保证构建的精确性和效率。
使问题复杂化的是,有些东西不应该包括在校验和中。首先,有一个给定任务的实际特定构建路径—WORKDIR。工作目录是否更改并不重要,因为它不应影响目标包的输出。此外,构建过程的目标是使本机包或跨包可重定位。
注意:本机包和交叉包都在构建主机上运行。但是,跨包为目标体系结构生成输出。因此校验和需要排除WORKDIR。排除工作目录的简单方法是将WORKDIR设置为某个固定值,并为“run”脚本创建校验和。另一个问题来自“run”脚本,这些脚本包含可能被调用或可能未被调用的函数。增量构建解决方案包含用于计算shell函数之间依赖关系的代码。这段代码用于将“run”脚本缩减到最小值集,从而缓解了这个问题,并使“run”脚本更具可读性。
到目前为止,shell脚本的解决方案已经存在。Python任务呢?即使这些任务比较困难,也可以采用同样的方法。这个过程需要弄清楚Python函数访问的变量以及它调用的函数。同样,增量构建解决方案包含的代码首先确定变量和函数的依赖关系,然后为用作任务输入的数据创建校验和。
像WORKDIR 的例子一样,存在依赖关系应该被忽略的情况。对于这些情况,可以使用如下行指示生成过程忽略依赖项:
PACKAGE_ARCHS[vardepsexclude] = "MACHINE"
此示例确保PACKAGE_ARCHS 变量不依赖于MACHINE的值,即使它引用了MACHINE的值。
同样,在某些情况下,您需要添加BitBake无法找到的依赖项。您可以使用以下行来完成此操作:
PACKAGE_ARCHS[vardeps] = "MACHINE"
这个例子显式地添加MACHINE 变量作为PACKAGE_ARCHS的依赖项。
作为一个例子,考虑一个内嵌Python的例子,BitBake无法找出依赖关系。在调试模式下运行(即使用-DDD)时,BitBake会在发现无法确定依赖关系的内容时生成输出。
到目前为止,仅讨论对任务的直接投入。基于直接输入的信息在代码中称为“basehash”。但是,任务的间接输入问题仍然存在——已经构建并存在于Build Directory中的项目。特定任务的校验和(或签名)需要添加特定任务所依赖的所有任务的哈希值。选择要添加的依赖项是一个策略决策。然而,其效果是生成一个主校验和,它结合了basehash和任务依赖项的散列。
在代码级别上,存在多种方法可以影响basehash和依赖任务哈希。在BitBake配置文件中,可以为BitBake提供一些额外的信息,以帮助它构造basehash。下面的语句有效地生成了一个全局变量依赖排除列表(即变量从未包含在任何校验和中):
BB_HASHBASE_WHITELIST ?= "TMPDIR FILE PATH PWD BB_TASKHASH BBPATH DL_DIR \
SSTATE_DIR THISDIR FILESEXTRAPATHS FILE_DIRNAME HOME LOGNAME SHELL TERM \
USER FILESPATH STAGING_DIR_HOST STAGING_DIR_TARGET COREBASE PRSERV_HOST \
PRSERV_DUMPDIR PRSERV_DUMPFILE PRSERV_LOCKDOWN PARALLEL_MAKE \
CCACHE_DIR EXTERNAL_TOOLCHAIN CCACHE CCACHE_DISABLE LICENSE_PATH SDKPKGSUFFIX"
前面的例子排除了WORKDIR ,因为该变量实际上是作为TMPDIR中的路径构造的,TMPDIR位于白名单中。
决定通过依赖链包含哪些依赖任务哈希的规则更为复杂,通常使用Python函数来完成。meta/lib/oe/sstatesig.py显示了两个示例,并说明了如何在需要时将自己的策略插入到系统中。这个文件定义了OE-Core使用的两个基本签名生成器:“OEBasic”和“OEBasicHash”。默认情况下,BitBake中启用了一个虚拟的“noop”签名处理程序。这意味着行为与以前的版本没有变化。默认情况下,OE-Core通过中的此设置使用“OEBasicHash”签名处理程序bitbake.conf文件:
BB_SIGNATURE_HANDLER ?= "OEBasicHash"
“OEBasicHash” BB_SIGNATURE_HANDLER 与 “OEBasic” 版本相同,但将任务哈希添加到stamp文件中。这将导致更改任务哈希的任何元数据更改,从而自动导致任务再次运行。这就消除了对PR 值的需要,对元数据的更改会自动在构建中产生涟漪。
还值得注意的是,这些签名生成器的最终结果是使一些依赖项和哈希信息可用于构建。这些信息包括:
BB_BASEHASH_task-taskname:配方中每个任务的基本哈希。BB_BASEHASH_filename:taskname:每个依赖任务的基哈希。BBHASHDEPS_filename:taskname:每个任务的任务相关性。BB_TASKHASH:当前正在运行的任务的哈希值。
3 共享状态
解决前面讨论的共享状态和半个状态的校验和问题。问题的另一半是能够在构建期间使用校验和信息,以及能够重用或重建特定组件。
sstate 类是如何“capture”给定任务的快照的相对通用的实现。其思想是构建过程不关心任务输出的来源。输出可以是新生成的,也可以从某个地方下载和解包。换句话说,构建过程不需要担心它的起源。
存在两种类型的输出。一种是在WORKDIR中创建一个目录。一个很好的例子是do_install 或do_package的输出。另一种类型的输出发生在将一组数据合并到共享目录树(如sysroot)中时。
Yocto项目团队试图将实现的细节隐藏在sstate类中。从用户的角度来看,将共享状态包装添加到任务中非常简单,这是一个取自deploy 类的do_deploy 示例:
DEPLOYDIR = "${WORKDIR}/deploy-${PN}"
SSTATETASKS += "do_deploy"
do_deploy[sstate-inputdirs] = "${DEPLOYDIR}"
do_deploy[sstate-outputdirs] = "${DEPLOY_DIR_IMAGE}"
python do_deploy_setscene () {
sstate_setscene(d)
}
addtask do_deploy_setscene
do_deploy[dirs] = "${DEPLOYDIR} ${B}"
do_deploy[stamp-extra-info] = "${MACHINE_ARCH}"
下表说明了前面的示例:
- 在
SSTATETASKS中添加“do_deploy”会在do_deploy 任务之前和之后添加一些必需的sstate相关处理(在sstate 类中实现)。 do_deploy[sstate-inputdirs] = "${DEPLOYDIR}"声明当正常运行时(即不使用sstate缓存时),do_deploy将其输出放在${DEPLOYDIR}中。此输出将成为共享状态缓存的输入。do_deploy[sstate-outputdirs] = "${DEPLOY_DIR_IMAGE}"这一行将共享状态缓存的内容复制到${DEPLOY_DIR_IMAGE}。
注意:如果do_deploy不在共享状态缓存中,或者如果它的输入校验和(签名)与缓存输出时不同,那么任务将运行以填充共享状态缓存,然后共享状态缓存的内容将复制到${DEPLOY_DIR_IMAGE}。如果do_deploy在共享状态缓存中,并且其签名指示缓存的输出仍然有效(即如果没有相关的任务输入发生更改),则共享状态缓存的内容将直接由do_deploy_setscene 任务复制到${DEPLOY_DIR_IMAGE},而跳过do_deploy 任务。
- 以下任务定义是使先前设置生效所需的粘合逻辑:
python do_deploy_setscene () {
sstate_setscene(d)
}
addtask do_deploy_setscene
sstate_setscene()将上述标志作为输入,并通过共享状态缓存加速do_deploy 任务(如果可能)。如果任务被加速,sstate_setscene()将返回True。否则,它将返回False,并运行正常的do_deploy 任务。
do_deploy[dirs] = "${DEPLOYDIR} ${B}"这一行在do_deploy任务运行之前创建${DEPLOYDIR}和${B},并且还将do_deploy的当前工作目录设置为${B}。
注意:在sstate-inputdirs和sstate-outputdirs相同的情况下,可以使用sstate-plaindirs。例如,要保留do_package 任务的${PKGD}和${PKGDEST}输出,请使用以下命令:
do_deploy[stamp-extra-info] = "${MACHINE_ARCH}"这一行将额外的元数据附加到stamp文件中。在这种情况下,元数据使任务特定于机器的体系结构。sstate-inputdirs和sstate-outputdirs也可以用于多个目录。例如,以下命令将PKGDESTWORK和SHLIBWORK声明为共享状态输入目录(填充共享状态缓存),将PKGDATA_DIR和SHLIBSDIR声明为相应的共享状态输出目录:
自我介绍一下,小编13年上海交大毕业,曾经在小公司待过,也去过华为、OPPO等大厂,18年进入阿里一直到现在。
深知大多数嵌入式工程师,想要提升技能,往往是自己摸索成长或者是报班学习,但对于培训机构动则几千的学费,着实压力不小。自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年嵌入式&物联网开发全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友,同时减轻大家的负担。

既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,基本涵盖了95%以上嵌入式&物联网开发知识点,真正体系化!

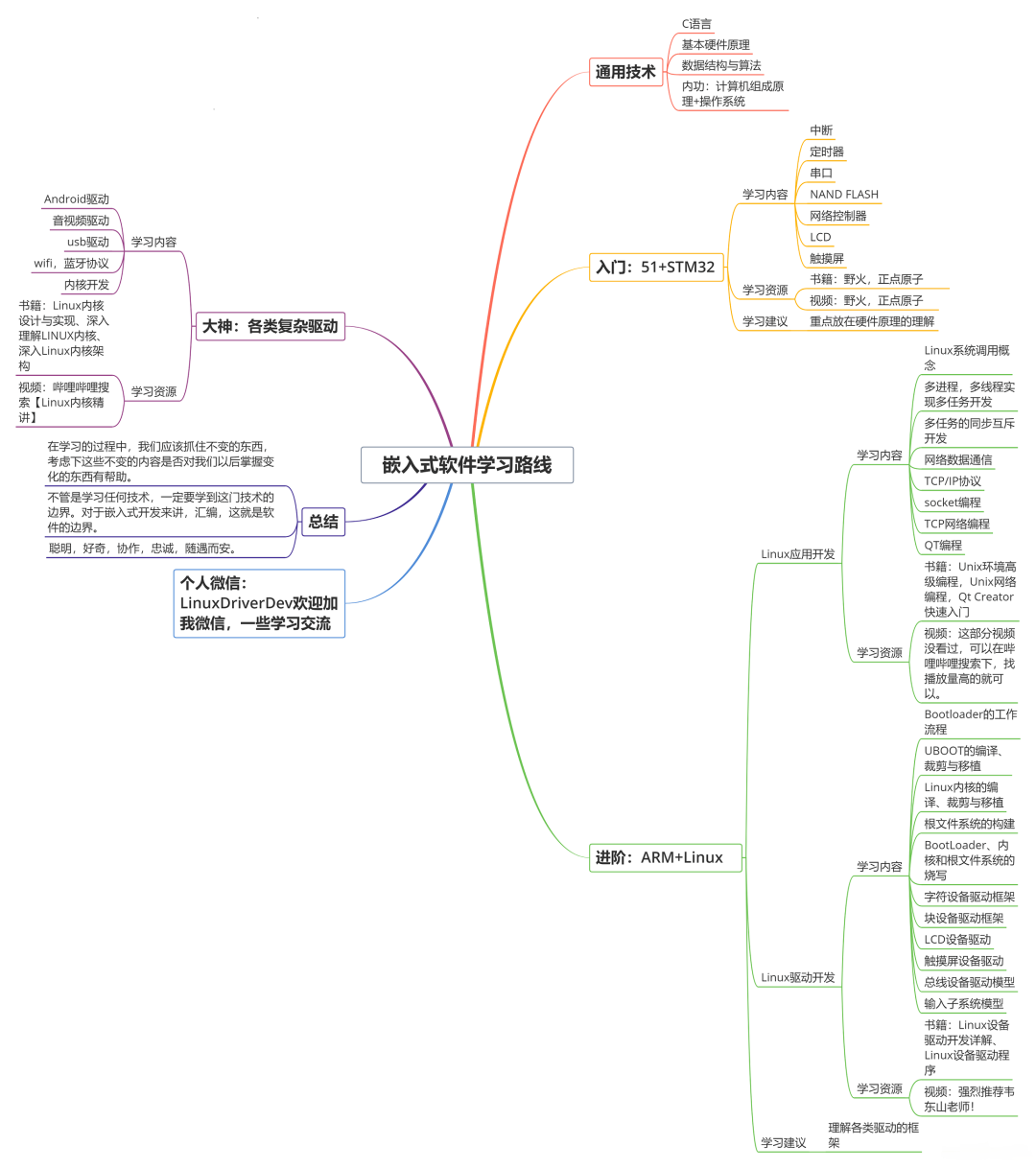
由于文件比较大,这里只是将部分目录大纲截图出来,每个节点里面都包含大厂面经、学习笔记、源码讲义、实战项目、讲解视频,并且后续会持续更新
如果你觉得这些内容对你有帮助,可以+V:Vip1104z获取!!! (备注:嵌入式)

最后
资料整理不易,觉得有帮助的朋友可以帮忙点赞分享支持一下小编~
你的支持,我的动力;祝各位前程似锦,offer不断,步步高升!!!
sdnimg.cn/images/73bb5de17851459088c6af944156ee24.jpg" alt=“img” style=“zoom: 67%;” />
最后
资料整理不易,觉得有帮助的朋友可以帮忙点赞分享支持一下小编~
你的支持,我的动力;祝各位前程似锦,offer不断,步步高升!!!















 1629
1629











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









