







先自我介绍一下,小编浙江大学毕业,去过华为、字节跳动等大厂,目前阿里P7
深知大多数程序员,想要提升技能,往往是自己摸索成长,但自己不成体系的自学效果低效又漫长,而且极易碰到天花板技术停滞不前!
因此收集整理了一份《2024年最新大数据全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升又不知道该从何学起的朋友。

既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
如果你需要这些资料,可以添加V获取:vip204888 (备注大数据)

正文
dim = (width, int(h \* r))
resized = cv2.resize(image, dim, interpolation=inter)
return resized
上方我们传入resize函数的参数是`orig, height = 500`,那么orig是原始图像的copy,因为取轮廓是不可逆的,所以我们用copy去做,这里我们提取到图像的h和w,因为我们设置了height所以直接跳到`if width is None`,比例`r=height/float(h)`,为了把width设置成和height同比例,所以进行了`dim = (int(w * r), height)`,完成之后呢,就把dim传入到`cv2.resize(image,dim,interpolation=inter)`,这里就把图像进行了同比例的resize操作。完成之后呢我们继续DEBUG继续看。
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (5, 5), 0)
edged = cv2.Canny(gray, 75, 200)
对图像进行了形态学处理,分别是颜色空间转换,也就是彩色BGR转灰度,然后,进行了一次高斯滤波操作,可以让原图像模糊,目的就是为了去除噪音,最后计算出边缘信息,阈值设置为75到200。
cv2.imshow(“Image”, image)
cv2.imshow(“Edged”, edged)
cv2.waitKey(0)
cv2.destroyAllWindows()
展示一下处理之后的结果。
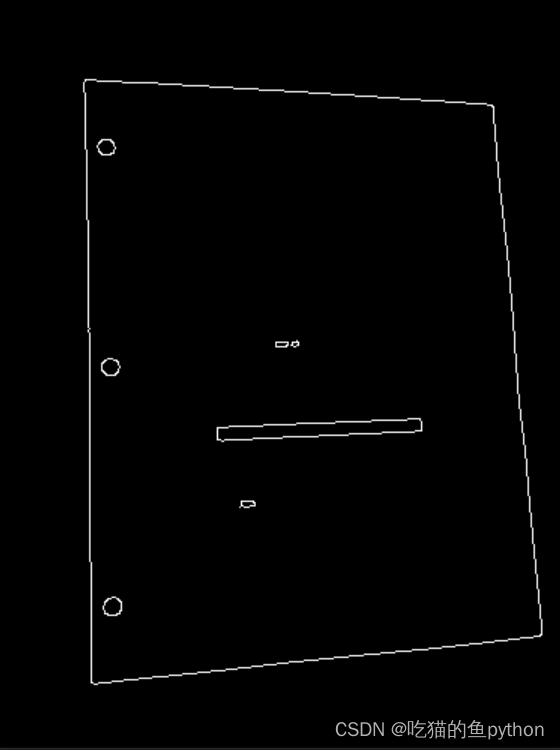
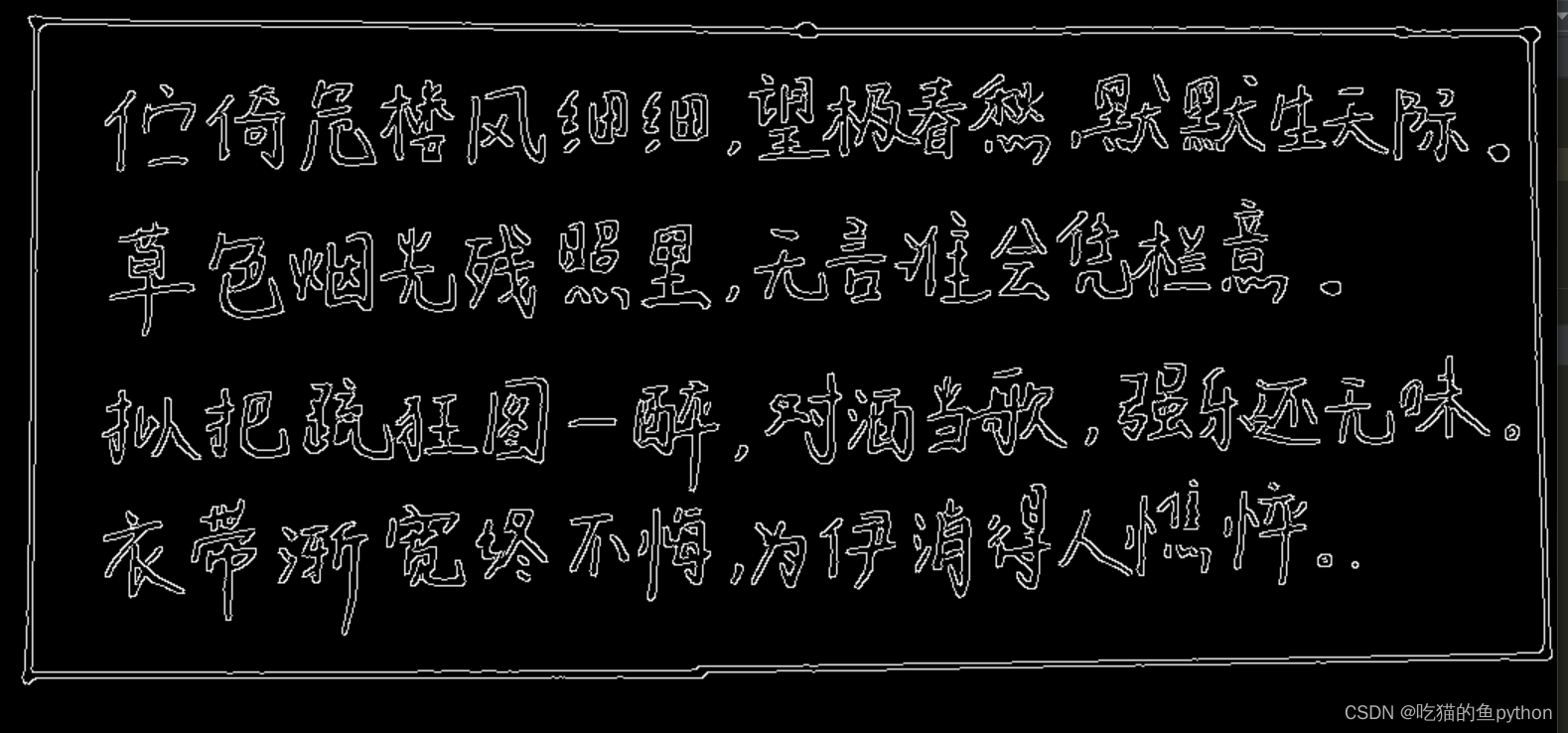
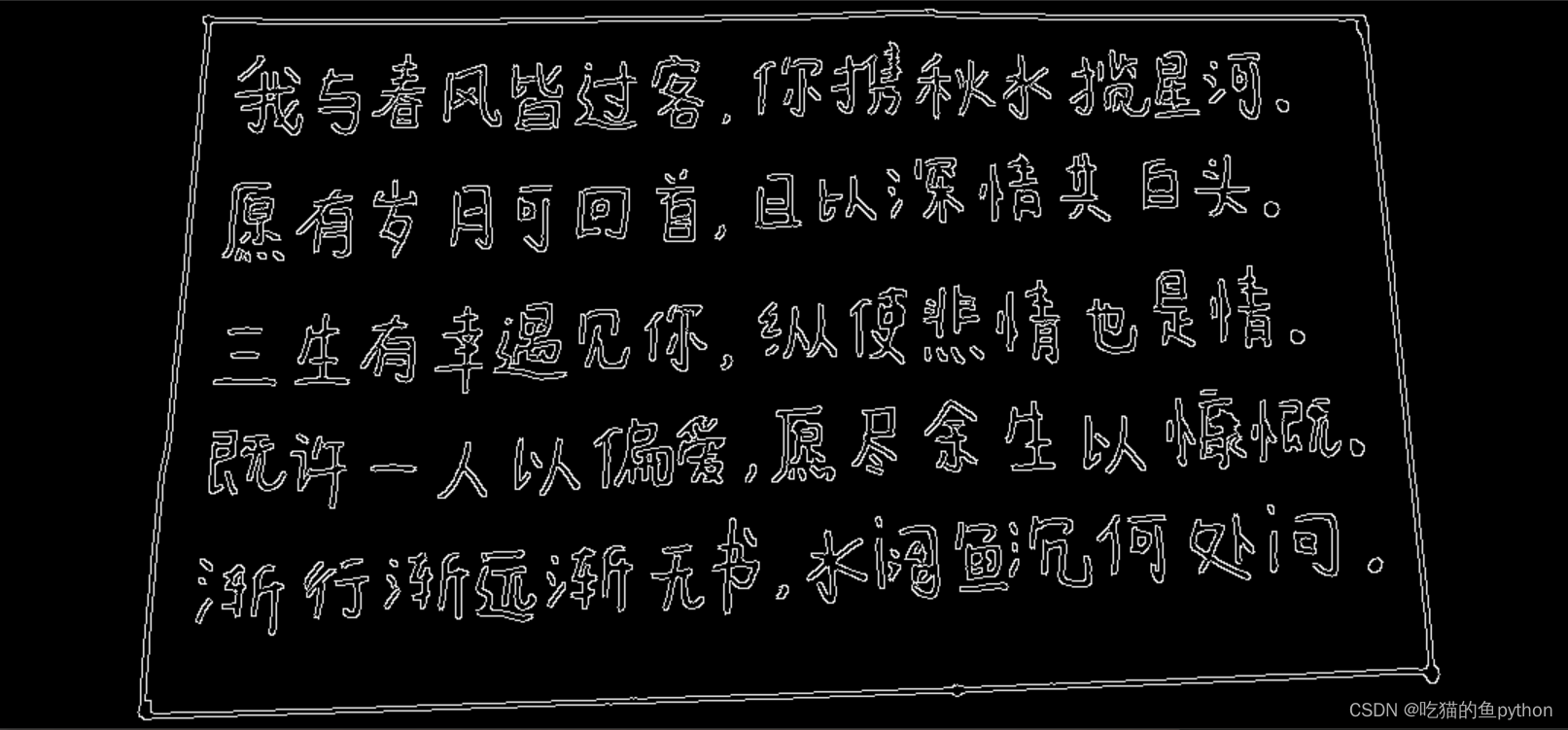
这就是边缘检测之后的结果了,但是边缘检测之后的结果是一个点一个点的,所以我们要进行轮廓的提取。然后我们要进行一个轮廓的提取,我们要对图像中最外面的轮廓进行提取,因为我们要提取文档。
cnts = cv2.findContours(edged.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)[0]
cnts = sorted(cnts, key = cv2.contourArea, reverse = True)[:5]
这里我们首先进行了一个轮廓的提取,里面的参数`cv2.RETR_LIST`表示检测的轮廓不建立等级关系,`cv2.CHAIN_APPROX_SIMPLE`这里表示只简单的进行提取轮廓,用四个点来展示轮廓。因为这里返回了两个参数,老版本的CV返回的三个参数,但是我们只要轮廓参数就好了。所以设置索引为0,得到轮廓后呢,我们把轮廓按照面积大小进行了排序,由大到小,并且只取前五个。
for c in cnts:
# 计算轮廓近似
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
# 4个点的时候就拿出来
if len(approx) == 4:
screenCnt = approx
break
展示结果
print(“STEP 2: 获取轮廓”)
cv2.drawContours(image, [screenCnt], -1, (0, 255, 0), 2)
cv2.imshow(“Outline”, image)
cv2.waitKey(0)
cv2.destroyAllWindows()
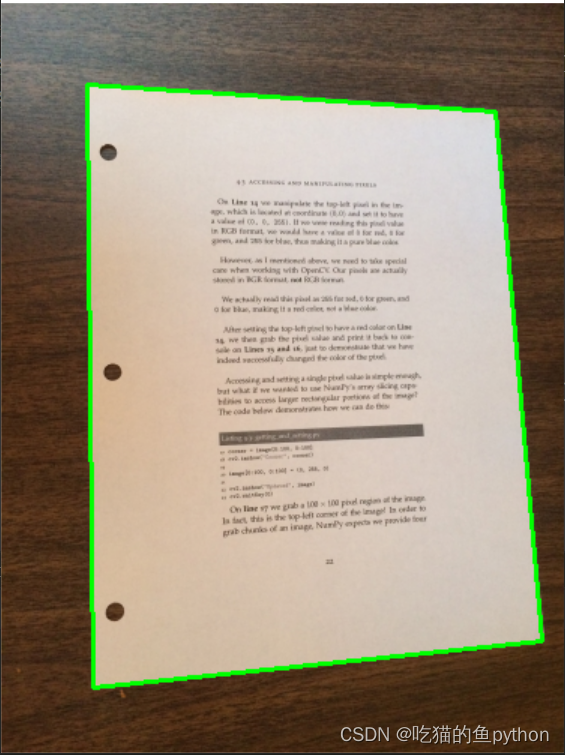
这里`cv2.arcLength`表示计算轮廓的周长。`cv2.approxPolyDP`主要功能是把一个连续光滑曲线折线化,其中`0.02 * peri`表示从原始轮廓到近似轮廓的最大距离,它是一个准确度参数。当轮廓是四个点的时候就拿出来,然后我们进行一个显示。得到的结果是:
接下来就是一个最主要的一个部分,就是透视变换,也就是说我们想把后面的背景全部去掉,也就是想把我们轮廓检测出来的这一块拿出来单独成一个图像,然后方便我们去OCR文字识别。
warped = four_point_transform(orig, screenCnt.reshape(4, 2) * ratio)
我们直接跳进`four_point_transform`函数中。
def four_point_transform(image, pts):
rect = order_points(pts)
(tl, tr, br, bl) = rect
# 计算输入的w和h值
widthA = np.sqrt(((br[0] - bl[0]) \*\* 2) + ((br[1] - bl[1]) \*\* 2))
widthB = np.sqrt(((tr[0] - tl[0]) \*\* 2) + ((tr[1] - tl[1]) \*\* 2))
maxWidth = max(int(widthA), int(widthB))
heightA = np.sqrt(((tr[0] - br[0]) \*\* 2) + ((tr[1] - br[1]) \*\* 2))
heightB = np.sqrt(((tl[0] - bl[0]) \*\* 2) + ((tl[1] - bl[1]) \*\* 2))
maxHeight = max(int(heightA), int(heightB))
# 变换后对应坐标位置
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype = "float32")
# 计算变换矩阵
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
# 返回变换后结果
return warped
首先利用`order_points`获取坐标。我们可以看到首先设定了rect这个0矩阵,用来传我们的坐标点,按顺序找到对应坐标0123分别是 左上,右上,右下,左下
def order_points(pts):
# 一共4个坐标点
rect = np.zeros((4, 2), dtype = “float32”)
s = pts.sum(axis = 1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# 计算右上和左下
diff = np.diff(pts, axis = 1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
这里`pts.sum(axis = 1)`就是把横纵坐标进行一个相加的操作,那么最小的肯定就是左上的点,最大的肯定就是右下。
`np.diff(pts, axis = 1)`是求diff=y-x, 那么最小的是右上,最大的是左下。这样我们就把轮廓的四个点拿出来了。返回去我们继续看,`(tl, tr, br, bl) = rect`这里拿到了这四个点。widthA和widthB分别计算矩形上下的边长分别是多少,我们需要选择一个相对更大的,来把整个文件图片框住。heightA和heightB就是对于竖直的两个边进行了判断。然后定义一个转换后的坐标值。然后需要计算一个如何将当前图像转换到定义好的图像,需要计算一个转换矩阵M,然后我们通过使用原始矩阵\*M就可以得到处理后的结果了。
然后对于经过透视变换的图进行形态学处理。并且展示结果。
warped = cv2.cvtColor(warped, cv2.COLOR_BGR2GRAY)
ref = cv2.threshold(warped, 100, 255, cv2.THRESH_BINARY)[1]
cv2.imwrite(‘scan.jpg’, ref)
print(“STEP 3: 变换”)
cv2.imshow(“Original”, resize(orig, height = 650))
cv2.imshow(“Scanned”, resize(ref, height = 650))
cv2.waitKey(0)
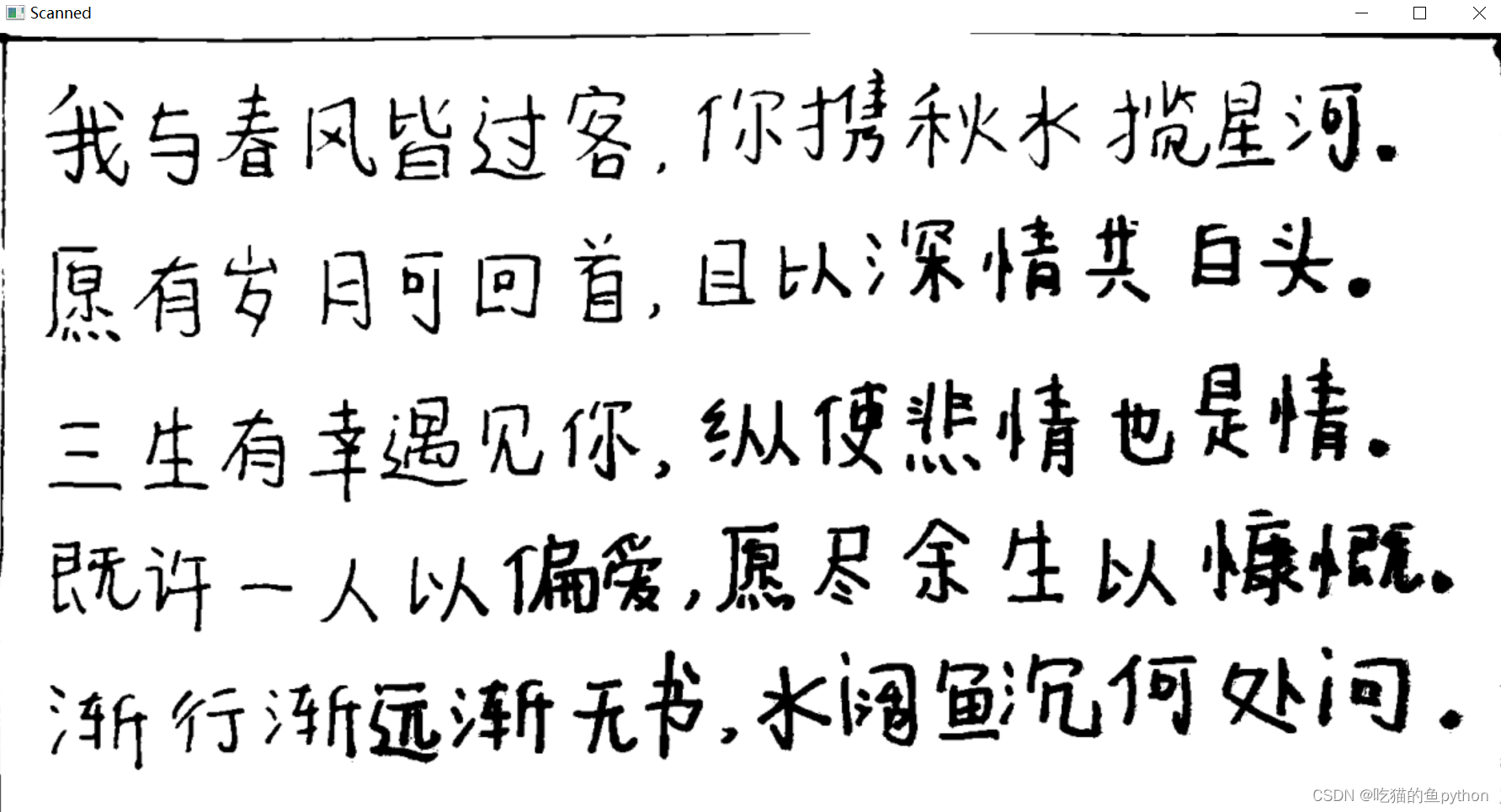
这里我们就把整个轮廓给抠出来了,接下来就是识别的操作。
### 🌟项目OCR识别操作介绍
首先我们先要对OCR文件进行下载:[下载地址]( )

用到的是最后一个。或者`pip install pytesseract`。
导入第三方库
from PIL import Image
import pytesseract
import cv2
import os
image = cv2.imread(‘scan.jpg’)
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
if preprocess == “thresh”:
gray = cv2.threshold(gray, 0, 255,cv2.THRESH_BINARY | cv2.THRESH_OTSU)[1]
if preprocess == “blur”:
gray = cv2.medianBlur(gray, 3)
filename = “{}.png”.format(os.getpid())
cv2.imwrite(filename, gray)
text = pytesseract.image_to_string(Image.open(filename),lang=‘chi_sim’)
print(text)
cv2.imshow(“Image”, image)
cv2.imshow(“Output”, gray)
cv2.waitKey(0)
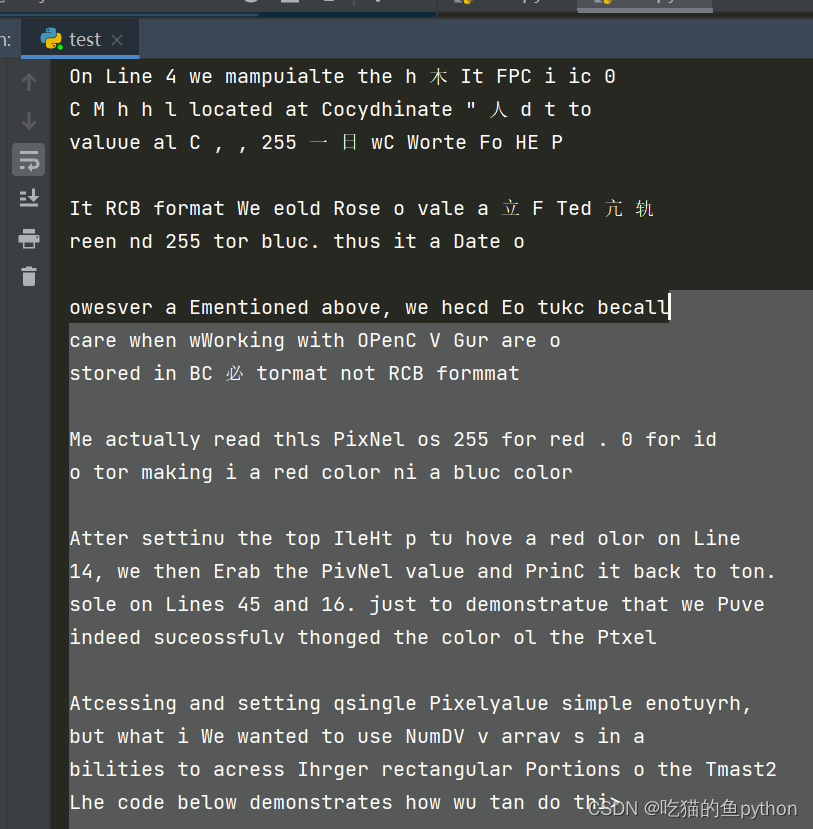
这里就是一些形态学处理,其中包括转灰度,然后进行中值滤波或者二值。最后通过`pytesseract.image_to_string(Image.open(filename),lang='chi_sim')`,进行输出识别内容。最后一个参数指定语言的。然后显示出来把图像。
**网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。**
**需要这份系统化的资料的朋友,可以添加V获取:vip204888 (备注大数据)**

**一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**
学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。**
**需要这份系统化的资料的朋友,可以添加V获取:vip204888 (备注大数据)**
[外链图片转存中...(img-0F7zgZv5-1713434443838)]
**一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!**














 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









