







既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新
后者是为了方便我们管理图的大小,比如resize(img, width=500) 或 resize(img, height=500) 可以把大大小小的图片转换成相应比例的统一宽高的图片,方便我们观察。
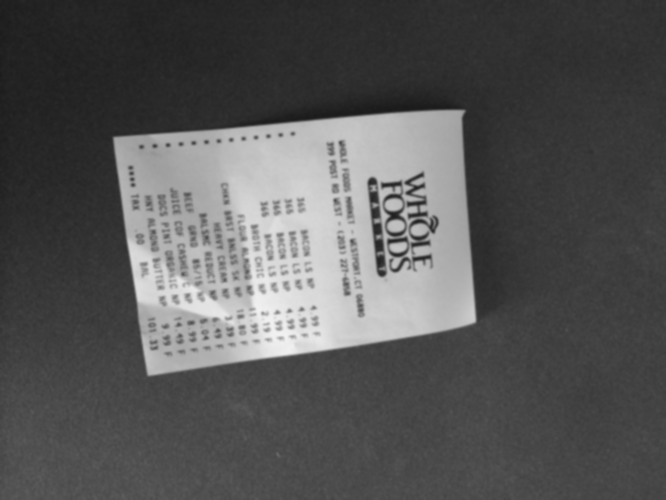
读取输入图片,做预处理;
# 读取输入
image = cv2.imread("./images/receipt.jpg")
# 统一图片大小
orig = image.copy()
image = resize(orig, height=500)
# 记录变化比例 后面会用到
ratio = image.shape[0] / 500.0
# 预处理
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 转化为灰度图
gray = cv2.GaussianBlur(gray, (5, 5), 0) # 高斯滤波降噪
cv_show('edged',gray)
进行边缘检测;
# 边缘检测
edged = cv2.Canny(gray, 75, 200)
cv_show('edged',edged)
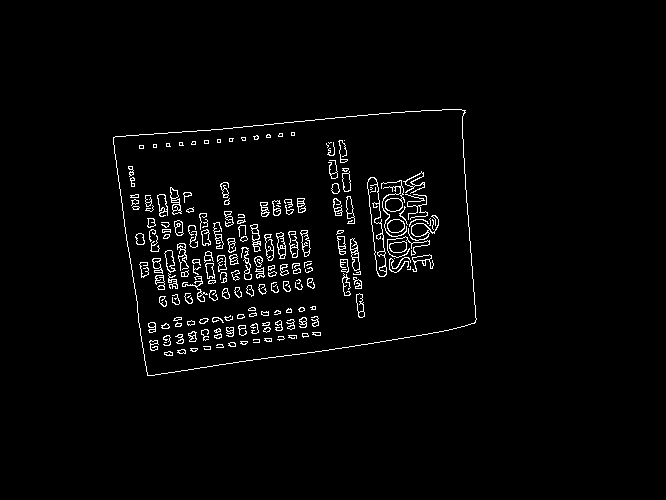
进行轮廓检测;
由于我们后面仿射变换需要的只是图片中对象的四个角的坐标,因此轮廓检测时把面积最大的轮廓拿出来就行。
# 轮廓检测
cnts = cv2.findContours(edged.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)[0]
# 根据面积倒序 只要最大的面积那n组。
need_cnts = sorted(cnts, key=cv2.contourArea, reverse=True)[:4]# 几组都行,其实倒序后的第一个基本上就是面积最大的。
此时,第一个轮廓也有可能与第二个轮廓很像或者基本表示同一个轮廓,毕竟图片中的对象不够平整。 我们先一步进行边缘检测,后一步进行轮廓检测。本例中排序完成后,cnts[0]与cnts[1]都是我们想要的那部分。即下一步绿色框中的图片:
遍历轮廓,进行轮廓近似;
由于我们上一步取出好几组(基本上第一组就是了)可能的轮廓(每个轮廓是一组点集,因为图像并不平整,所以我们接下来进行轮廓近似,我们对这几组进行遍历,确定它有四个点就说明是我们想要的答案。 不明白轮廓近似的建议去了解一下。
# 遍历轮廓
for c in cnts:
# 轮廓近似
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
# 近似成4个点的时候就拿出来
if len(approx) == 4:
screenCnt = approx
break
cv2.drawContours(image, [screenCnt], -1, (0, 255, 0), 2)
cv_show('Outline',image)
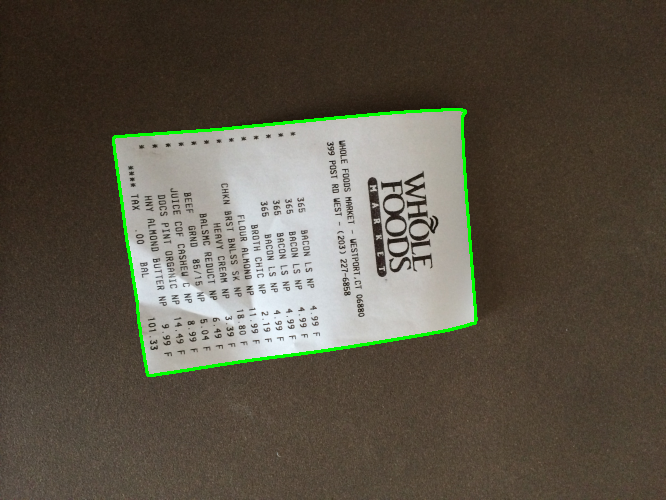
解释一下这一步和上一步:其实就是我们边缘检测后的图片进行轮廓检测,取出轮廓面积最大的n组轮廓,每个轮廓是一组点集,不一定就是四个点,也可能是100个构成一个轮廓,我们按顺序进行轮廓近似,一般循环到第一遍的时候就可以近似成我们想要的上图的这个轮廓了,我们也就得到了这四个顶点。
透视变换
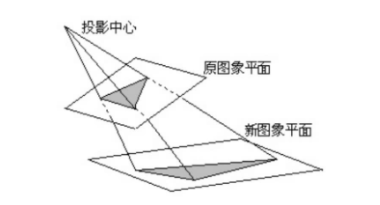
我们上一步拿到了那四个点的坐标,那个对应的轮廓也不是平行的,我们要做的就是把“它正过来”,平铺在图片上。
我们首先要确定四个的位置,左上、右上、右下、左上。
# 处理点坐标,返回rect使其顺序为左上,右上,右下,左下
def order_points(pts):
# 一共4个坐标点
rect = np.zeros((4, 2), dtype="float32")
# 计算左上,右下 左上的x和y都是最小的 右下的x和y都是最大的
s = pts.sum(axis=1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# 计算右上和左下 np.diff后一项减前一项
diff = np.diff(pts, axis=1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
两点间距离公式,我们计算最长的宽高,知道宽和高了我们就可以自己规定个矩阵,根据变换矩阵
把原图转换为“铺平 铺满”后的图片:
def four_point_transform(image, pts):
# 获取输入坐标点
rect = order_points(pts)
tl, tr, br, bl = rect
# 两点间距离公式计算输入的w和h值
widthTop = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
widthBot = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))
# 要最大的 看着方便 下同
maxWidth = max(int(widthTop), int(widthBot))
heightRight = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))
heightLeft = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))
maxHeight = max(int(heightRight), int(heightLeft))
# 变换后对应坐标位置
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype="float32")
# 计算变换矩阵
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
# 返回变换后结果
return warped
我们执行上方函数:
# 透视变换 记得乘以比例,我们之前为了方便观察统一过大小。
warped = four_point_transform(orig, screenCnt.reshape(4, 2) * ratio)
cv_show('warped',resize(warped, height=650))
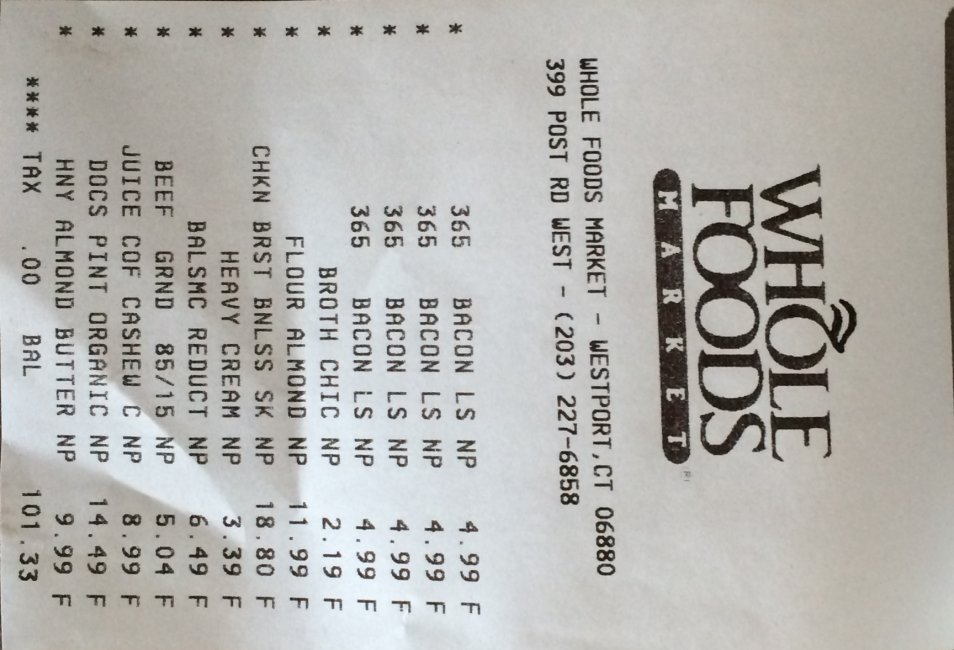
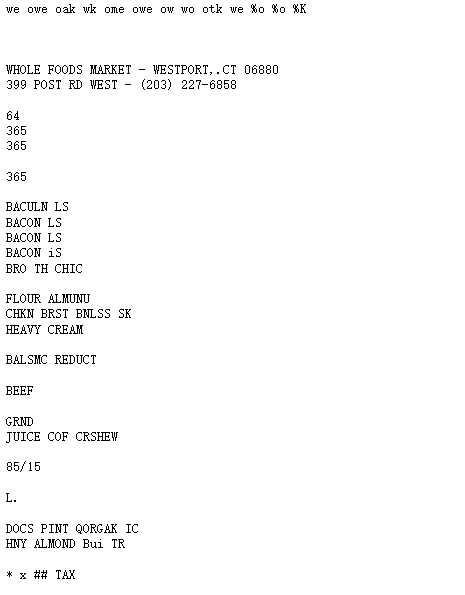
最后进行ocr检测
对上一步获得的warped进行二值处理,使用pytesseract.image_to_string()即可。
from PIL import Image
import pytesseract
warped = cv2.cvtColor(warped, cv2.COLOR_BGR2GRAY)
ref = cv2.threshold(warped, 100, 255, cv2.THRESH_BINARY)[1]
filename = "{}.png".format('内容')
cv2.imwrite(filename, gray)
text = pytesseract.image_to_string(Image.open(filename))
print(text)
os.remove(filename)
得到结果
四、完整代码
# 导入工具包
import os
import cv2
import pytesseract
import numpy as np
from PIL import Image
def cv_show(name, img):
cv2.imshow(name, img)
cv2.waitKey(0)
cv2.destroyAllWindows()
def resize(image, width=None, height=None, inter=cv2.INTER_AREA):
dim = None
(h, w) = image.shape[:2]
if width is None and height is None:
return image
if width is None:
r = height / float(h)
dim = (int(w * r), height)
else:
r = width / float(w)
dim = (width, int(h * r))
resized = cv2.resize(image, dim, interpolation=inter)
return resized
def order_points(pts):
# 一共4个坐标点
rect = np.zeros((4, 2), dtype="float32")
# 按顺序找到对应坐标0123分别是 左上,右上,右下,左下
# 计算左上,右下
s = pts.sum(axis=1)
rect[0] = pts[np.argmin(s)]
rect[2] = pts[np.argmax(s)]
# 计算右上和左下
diff = np.diff(pts, axis=1)
rect[1] = pts[np.argmin(diff)]
rect[3] = pts[np.argmax(diff)]
return rect
def four_point_transform(image, pts):
# 获取输入坐标点
rect = order_points(pts)
tl, tr, br, bl = rect
# 两点间距离公式计算输入的w和h值
widthTop = np.sqrt(((tr[0] - tl[0]) ** 2) + ((tr[1] - tl[1]) ** 2))
widthBot = np.sqrt(((br[0] - bl[0]) ** 2) + ((br[1] - bl[1]) ** 2))
maxWidth = max(int(widthTop), int(widthBot))
heightRight = np.sqrt(((tr[0] - br[0]) ** 2) + ((tr[1] - br[1]) ** 2))
heightLeft = np.sqrt(((tl[0] - bl[0]) ** 2) + ((tl[1] - bl[1]) ** 2))
maxHeight = max(int(heightRight), int(heightLeft))
# 变换后对应坐标位置
dst = np.array([
[0, 0],
[maxWidth - 1, 0],
[maxWidth - 1, maxHeight - 1],
[0, maxHeight - 1]], dtype="float32")
# 计算变换矩阵
M = cv2.getPerspectiveTransform(rect, dst)
warped = cv2.warpPerspective(image, M, (maxWidth, maxHeight))
# 返回变换后结果
return warped
# 读取输入
image = cv2.imread("./images/receipt.jpg")
# 记录比例 后面会用到
ratio = image.shape[0] / 500.0
orig = image.copy()
# 统一图片大小
image = resize(orig, height=500)
# 预处理
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
gray = cv2.GaussianBlur(gray, (5, 5), 0)
# 边缘检测
edged = cv2.Canny(gray, 75, 200)
# 轮廓检测
cnts = cv2.findContours(edged.copy(), cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)[0]
cnts = sorted(cnts, key=cv2.contourArea, reverse=True)[:3]
# 遍历轮廓
for c in cnts:
# 计算轮廓近似
peri = cv2.arcLength(c, True)
approx = cv2.approxPolyDP(c, 0.02 * peri, True)
# 4个点的时候就拿出来
if len(approx) == 4:
screenCnt = approx
break
# 透视变换
warped = four_point_transform(orig, screenCnt.reshape(4, 2) * ratio)
# 文本检测
gray = cv2.cvtColor(warped, cv2.COLOR_BGR2GRAY)



**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新**
**[需要这份系统化资料的朋友,可以戳这里获取](https://bbs.csdn.net/topics/618545628)**
[外链图片转存中...(img-aBOuCuJx-1715633166311)]
[外链图片转存中...(img-YurOOVvh-1715633166311)]
[外链图片转存中...(img-2vcEwwFN-1715633166311)]
**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上大数据知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、讲解视频,并且后续会持续更新**
**[需要这份系统化资料的朋友,可以戳这里获取](https://bbs.csdn.net/topics/618545628)**















 784
784











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









