







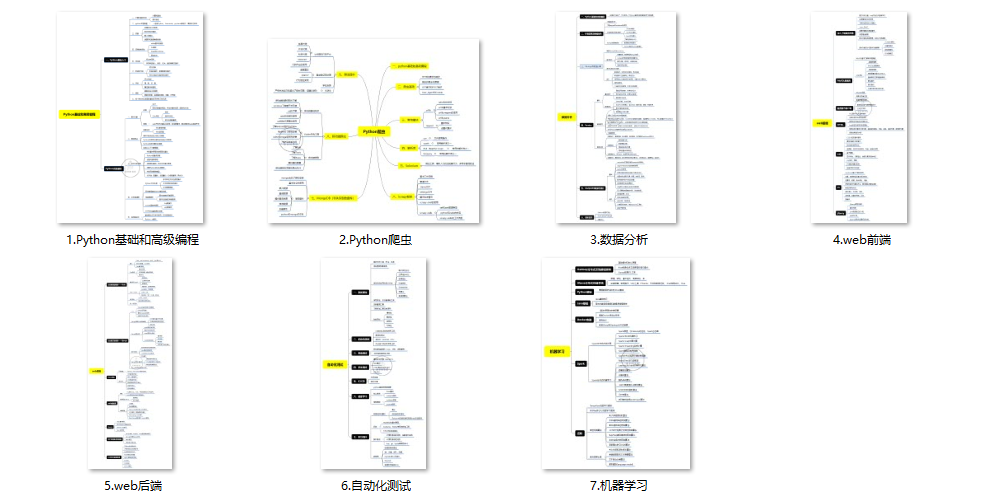
(1)Python所有方向的学习路线(新版)
这是我花了几天的时间去把Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。
最近我才对这些路线做了一下新的更新,知识体系更全面了。
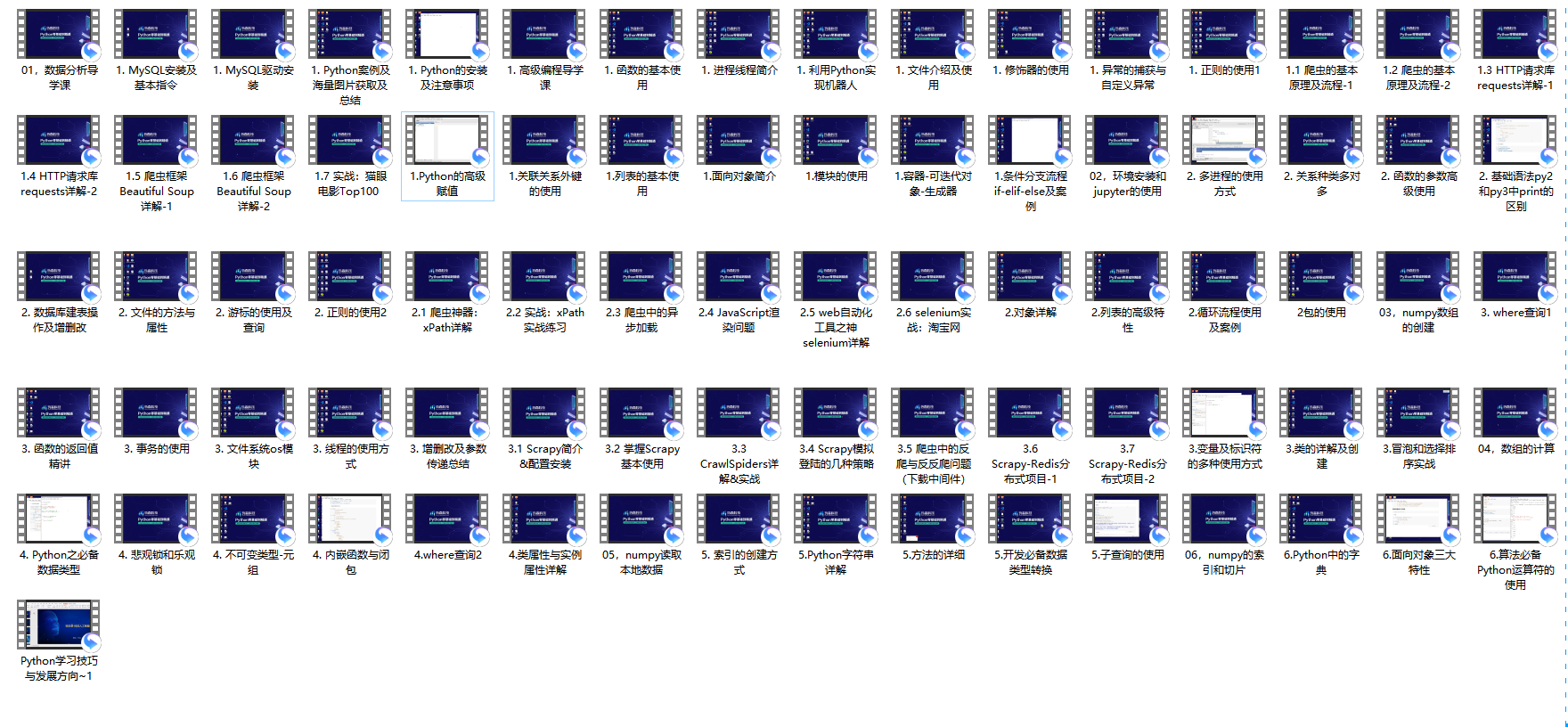
(2)Python学习视频
包含了Python入门、爬虫、数据分析和web开发的学习视频,总共100多个,虽然没有那么全面,但是对于入门来说是没问题的,学完这些之后,你可以按照我上面的学习路线去网上找其他的知识资源进行进阶。
(3)100多个练手项目
我们在看视频学习的时候,不能光动眼动脑不动手,比较科学的学习方法是在理解之后运用它们,这时候练手项目就很适合了,只是里面的项目比较多,水平也是参差不齐,大家可以挑自己能做的项目去练练。

网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
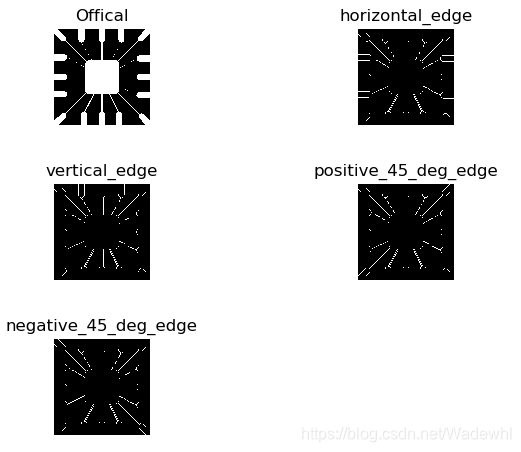
图像增强算法
拉普拉斯算子,自编写实现,利用空域卷积运算实现滤波
具有图像增强效果,同时亦可用于边缘检测、角点检测
import cv2
import numpy as np
import matplotlib.pyplot as plt
if name == ‘__main__’:
src = cv2.imread(‘enhance.jpg’, 1)
plt.subplot(3, 2, 1)
plt.imshow(src)
plt.axis('off')
plt.title('Offical')
kernel = np.array([[-1, -1, -1],
[2, 2, 2],
[-1, -1, -1]])
horizontal_edge = cv2.filter2D(src, cv2.CV_32F, kernel)
horizontal_edge = cv2.convertScaleAbs(horizontal_edge)
# \_, horizontal\_edge = cv2.threshold(horizontal\_edge, horizontal\_edge.max() \* 0.8, 255, cv2.THRESH\_BINARY)
plt.subplot(3, 2, 2)
plt.imshow(horizontal_edge)
plt.axis('off')
plt.title('horizontal\_edge')
kernel = np.array([[-1, 2, -1],
[-1, 2, -1],
[-1, 2, -1]])
vertical_edge = cv2.filter2D(src, ddepth=cv2.CV_32F, kernel=kernel)
vertical_edge = cv2.convertScaleAbs(vertical_edge)
# \_, vertical\_edge = cv2.threshold(vertical\_edge, vertical\_edge.max() \* 0.8, 255, cv2.THRESH\_BINARY)
plt.subplot(3, 2, 3)
plt.imshow(vertical_edge)
plt.axis('off')
plt.title('vertical\_edge')
kernel = np.array([[-1, -1, 2],
[-1, 2, -1],
[2, -1, -1]])
positive_45_deg_edge = cv2.filter2D(src, ddepth=cv2.CV_32F, kernel=kernel)
positive_45_deg_edge = cv2.convertScaleAbs(positive_45_deg_edge)
# positive\_45\_deg\_edge = cv2.threshold(positive\_45\_deg\_edge, positive\_45\_deg\_edge.max() \* 0.8, 255, cv2.THRESH\_BINARY)
plt.subplot(3, 2, 4)
plt.imshow(positive_45_deg_edge)
plt.axis('off')
plt.title('positive\_45\_deg\_edge')
kernel = np.array([[2, -1, -1],
[-1, 2, -1],
[-1, -1, 2]])
negative_45_deg_edge = cv2.filter2D(src, ddepth=cv2.CV_32F, kernel=kernel)
negative_45_deg_edge = cv2.convertScaleAbs(negative_45_deg_edge)
# negative\_45\_deg\_edge = cv2.threshold(negative\_45\_deg\_edge, negative\_45\_deg\_edge.max() \* 0.8, 255, cv2.THRESH\_BINARY)
cv2.imshow('negative\_45\_deg\_edge', negative_45_deg_edge)
plt.subplot(3, 2, 5)
plt.imshow(negative_45_deg_edge)
plt.axis('off')
plt.title('negative\_45\_deg\_edge')
plt.show()
结果展示:
### LoG和DoG算子
LoG和DoG算子是拉普拉斯算子的改进方法。
LoG:高斯拉普拉斯算子(LoG,Laplacian of Gaussian),首先对图像进行高斯暖卷积滤波进行降噪处理,再采用Laplace算子进行边缘检测。
DoG:高斯函数差分(DoG, Difference of Gaussian), 是可以通过将图像与高斯函数进行卷积得到一幅图像的低通滤波结果,即去噪过程,这里的Gaussian和高斯低通滤波器的高斯一样,是一个函数,即为正态分布函数。同时,它对高斯拉普拉斯LoG的近似.
图像增强算法
LoG和DoG算子
均为基于拉普拉斯算子的改进
可用于边缘检测和角点检测
import cv2
import numpy as np
import matplotlib.pyplot as plt
def genGaussianKernel(ksize, sigma):
half_ksize = ksize // 2
C = 2 * np.pi * sigma * sigma
x = y = np.linspace(-half_ksize, half_ksize, ksize)
x, y = np.meshgrid(x, y)
kernel = np.exp(-(x ** 2 + y ** 2) / (2 * sigma ** 2)) / C
return kernel
def zerosCrossing(src, thresh):
dsize = (src.shape[1], src.shape[0])
M = np.array([[1, 0, -1], [0, 1, 0]], dtype=np.float32)
shift_left = cv2.warpAffine(src, M, dsize)
M = np.array([[1, 0, 1], [0, 1, 0]], dtype=np.float32)
shift_right = cv2.warpAffine(src, M, dsize)
M = np.array([[1, 0, 0], [0, 1, -1]], dtype=np.float32)
shift_up = cv2.warpAffine(src, M, dsize)
M = np.array([[1, 0, 0], [0, 1, 1]], dtype=np.float32)
shift_down = cv2.warpAffine(src, M, dsize)
M = np.array([[1, 0, 1], [0, 1, 1]], dtype=np.float32)
shift_right_down = cv2.warpAffine(src, M, dsize)
M = np.array([[1, 0, -1], [0, 1, -1]], dtype=np.float32)
shift_left_up = cv2.warpAffine(src, M, dsize)
M = np.array([[1, 0, 1], [0, 1, -1]], dtype=np.float32)
shift_right_up = cv2.warpAffine(src, M, dsize)
M = np.array([[1, 0, -1], [0, 1, 1]], dtype=np.float32)
shift_left_down = cv2.warpAffine(src, M, dsize)
shift_left_right_sign = (shift_left \* shift_right)
shift_up_down_sign = (shift_up \* shift_down)
shift_rd_lu_sign = (shift_right_down \* shift_left_up)
shift_ru_ld_sign = (shift_right_up \* shift_left_down)
shift_left_right_norm = abs(shift_left - shift_right)
shift_up_down_norm = abs(shift_up - shift_down)
shift_rd_lu_norm = abs(shift_right_down - shift_left_up)
shift_ru_ld_norm = abs(shift_right_up - shift_left_down)
candidate_zero_crossing = \
((shift_left_right_sign < 0) & (shift_left_right_norm > thresh)).astype('uint8') +\
((shift_up_down_sign < 0) & (shift_up_down_norm > thresh)).astype('uint8') + \
((shift_rd_lu_sign < 0) & (shift_rd_lu_norm > thresh)).astype('uint8') + \
((shift_ru_ld_sign < 0) & (shift_ru_ld_norm > thresh)).astype('uint8')
ResImg = np.zeros(shape=src.shape, dtype=np.uint8)
ResImg[candidate_zero_crossing >= 2] = 255
return ResImg
def LoG(src, ksize, sigma=0, thresh=None, alpha=0.01):
blur_img = cv2.GaussianBlur(src.astype(‘float32’), (ksize, ksize), sigmaX=sigma)
LoG_img = cv2.Laplacian(blur_img, cv2.CV_32F)
if thresh is None:
thresh = abs(LoG_img).max() * alpha
edge_image = zerosCrossing(LoG_img, thresh)
return edge_image
文末有福利领取哦~
👉一、Python所有方向的学习路线
Python所有方向的技术点做的整理,形成各个领域的知识点汇总,它的用处就在于,你可以按照上面的知识点去找对应的学习资源,保证自己学得较为全面。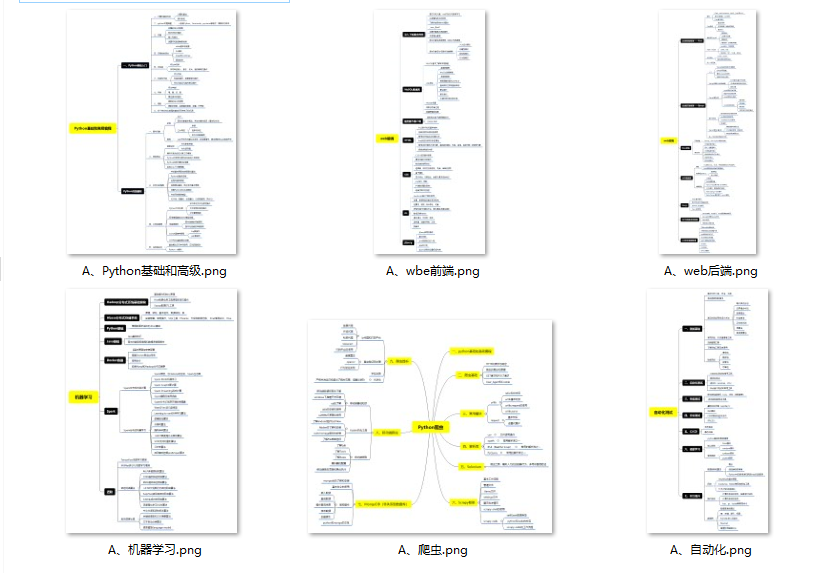
👉二、Python必备开发工具

👉三、Python视频合集
观看零基础学习视频,看视频学习是最快捷也是最有效果的方式,跟着视频中老师的思路,从基础到深入,还是很容易入门的。
👉 四、实战案例
光学理论是没用的,要学会跟着一起敲,要动手实操,才能将自己的所学运用到实际当中去,这时候可以搞点实战案例来学习。(文末领读者福利)
👉五、Python练习题
检查学习结果。
👉六、面试资料
我们学习Python必然是为了找到高薪的工作,下面这些面试题是来自阿里、腾讯、字节等一线互联网大厂最新的面试资料,并且有阿里大佬给出了权威的解答,刷完这一套面试资料相信大家都能找到满意的工作。
👉因篇幅有限,仅展示部分资料,这份完整版的Python全套学习资料已经上传
网上学习资料一大堆,但如果学到的知识不成体系,遇到问题时只是浅尝辄止,不再深入研究,那么很难做到真正的技术提升。
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人,都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









