







收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
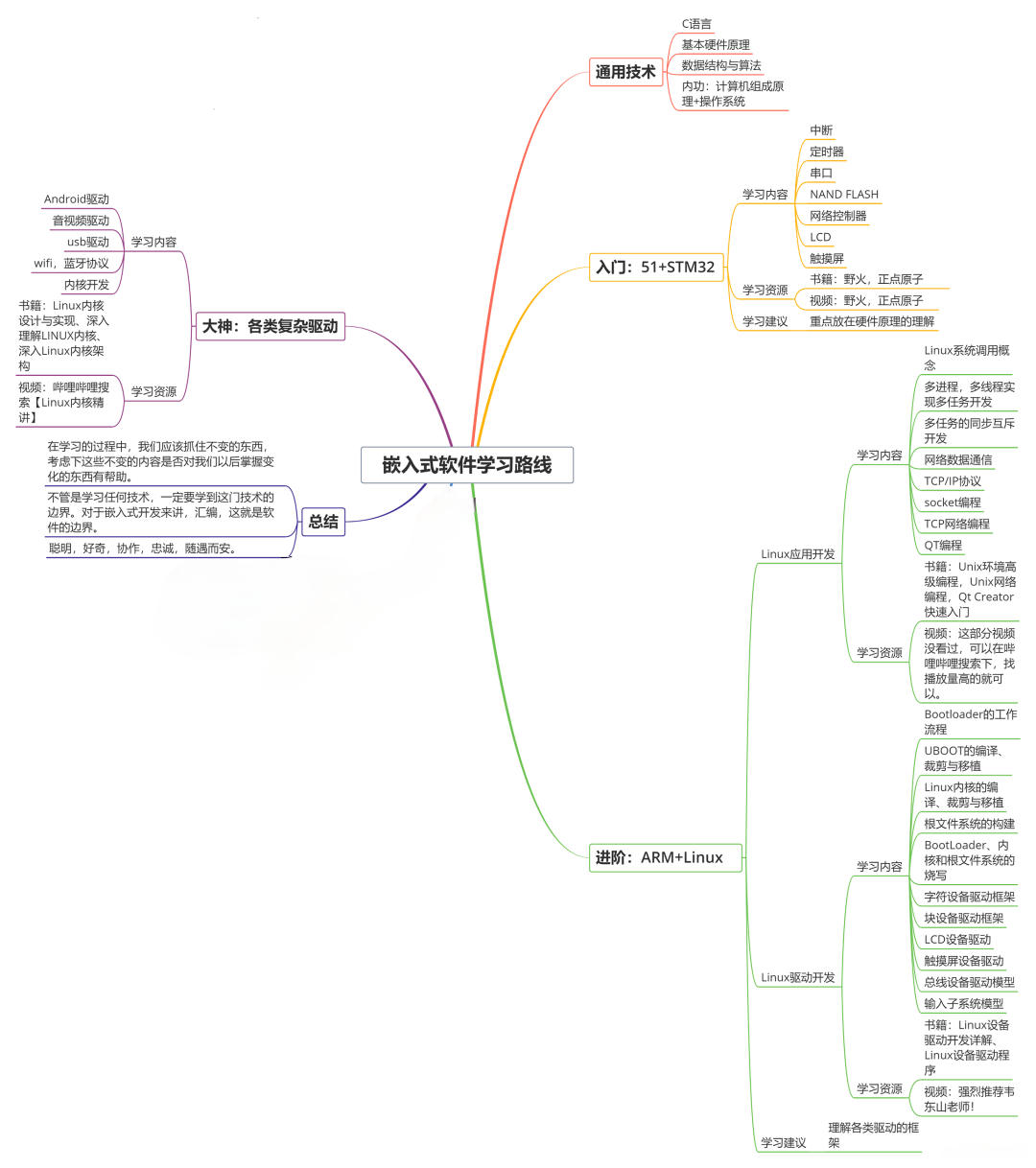
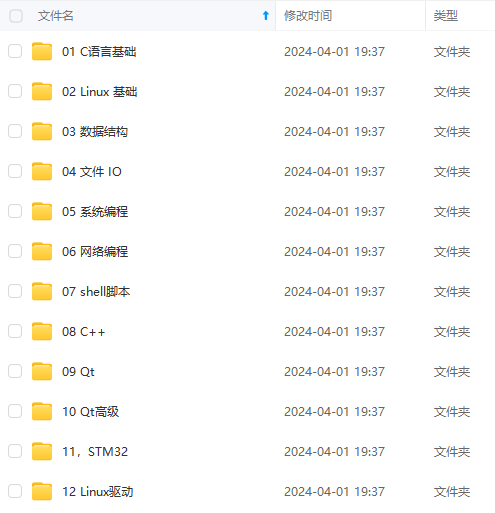
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
char PCD_Request(uint8_t RequestMode, uint8_t *pCardType)
{
int status;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
MFRC\_ClrBitMask(MFRC_Status2Reg, 0x08);//关内部温度传感器
MFRC\_WriteReg(MFRC_BitFramingReg, 0x07); //存储模式,发送模式,是否启动发送等
MFRC\_SetBitMask(MFRC_TxControlReg, 0x03);//配置调制信号13.56MHZ
CmdFrameBuf[0] = RequestMode;
status = MFRC\_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 1, CmdFrameBuf, &unLen);
if((status == PCD_OK) && (unLen == 0x10))
{
\*pCardType = CmdFrameBuf[0];
\*(pCardType + 1) = CmdFrameBuf[1];
}
return status;
}
* 防冲撞
/***************************************************************************************
* 函数名称:PCD_Anticoll
* 功能描述:防冲突,获取卡号
* 入口参数:-pSnr:用于保存卡片序列号,4字节
* 出口参数:-pSnr:卡片序列号,4字节
* 返 回 值:-status:错误代码(PCD_OK、PCD_NOTAGERR、PCD_ERR)
* 说 明:无
***************************************************************************************/
char PCD_Anticoll(uint8_t *pSnr)
{
char status;
uint8_t i, snr_check = 0;
uint16_t unLen;
uint8_t CmdFrameBuf[MFRC_MAXRLEN];
MFRC\_ClrBitMask(MFRC_Status2Reg, 0x08);
MFRC\_WriteReg(MFRC_BitFramingReg, 0x00);
MFRC\_ClrBitMask(MFRC_CollReg, 0x80);
CmdFrameBuf[0] = PICC_ANTICOLL1;
CmdFrameBuf[1] = 0x20;
status = MFRC\_CmdFrame(MFRC_TRANSCEIVE, CmdFrameBuf, 2, CmdFrameBuf, &unLen);
if(status == PCD_OK)
{
for(i = 0; i < 4; i++)
{
\*(pSnr + i) = CmdFrameBuf[i];
snr_check ^= CmdFrameBuf[i];
}
if(snr_check != CmdFrameBuf[i])
{
status = PCD_ERR;
}
}
switch (status)
{
case PCD_OK:
printf("寻卡OK\r\n");break;
case PCD_ERR:
printf("寻卡ERROR\r\n");break;
case PCD_NOTAGERR:
printf("无卡\r\n");break;
}
MFRC\_SetBitMask(MFRC_CollReg, 0x80);
return status;
}
### 4.2 二级内部调用函数
* 宏定义
//三目运算符true取前面那个
#define RS522_RST(N) HAL_GPIO_WritePin(RC522_RST_GPIO_Port, RC522_RST_Pin, N1?GPIO_PIN_SET:GPIO_PIN_RESET)
#define RS522_NSS(N) HAL_GPIO_WritePin(RC522_CS_GPIO_Port, RC522_CS_Pin, N1?GPIO_PIN_SET:GPIO_PIN_RESET)
#define osDelay HAL_Delay
* MFRC管脚配置
/**************************************************************************************
* 函数名称:MFRC_Init
* 功能描述:MFRC初始化
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:MFRC的SPI接口速率为0~10Mbps
***************************************************************************************/
void MFRC_Init(void)
{
RS522_NSS(1);
RS522_RST(1);
}
* PCD复位 并初始化配置
/**************************************************************************************
* 函数名称:PCD_Reset
* 功能描述:PCD复位
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void PCD_Reset(void)
{
/*硬复位*/
RS522_RST(1);//用到我们的复位引脚
osDelay(2);
RS522_RST(0);
osDelay(2);
RS522_RST(1);
osDelay(2);
/\*软复位\*/
MFRC\_WriteReg(MFRC_CommandReg, MFRC_RESETPHASE);
osDelay(2);
/\*复位后的初始化配置\*/
MFRC\_WriteReg(MFRC_ModeReg, 0x3D); //CRC初始值0x6363
MFRC\_WriteReg(MFRC_TReloadRegL, 30); //定时器重装值
MFRC\_WriteReg(MFRC_TReloadRegH, 0);
MFRC\_WriteReg(MFRC_TModeReg, 0x8D); //定时器设置
MFRC\_WriteReg(MFRC_TPrescalerReg, 0x3E); //定时器预分频值
MFRC\_WriteReg(MFRC_TxAutoReg, 0x40); //100%ASK
PCD\_AntennaOff(); //关天线
osDelay(2);
PCD\_AntennaOn(); //开天线
}
* 关闭天线
/**************************************************************************************
* 函数名称:PCD_AntennaOn
* 功能描述:开启天线,使能PCD发送能量载波信号
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:每次开启或关闭天线之间应至少有1ms的间隔
***************************************************************************************/
void PCD_AntennaOn(void)
{
uint8_t temp;
temp = MFRC_ReadReg(MFRC_TxControlReg);
if (!(temp & 0x03))
{
MFRC_SetBitMask(MFRC_TxControlReg, 0x03);
}
}
* 开启天线
/**************************************************************************************
* 函数名称:PCD_AntennaOff
* 功能描述:关闭天线,失能PCD发送能量载波信号
* 入口参数:无
* 出口参数:无
* 返 回 值:无
* 说 明:每次开启或关闭天线之间应至少有1ms的间隔
***************************************************************************************/
void PCD_AntennaOff(void)
{
MFRC_ClrBitMask(MFRC_TxControlReg, 0x03);
}
* RC与M1卡通讯帧函数
/**************************************************************************************
* 函数名称:MFRC_CmdFrame
* 功能描述:MFRC522和ISO14443A卡通讯的命令帧函数
* 入口参数:-cmd:MFRC522命令字
* -pIndata:MFRC522发送给MF1卡的数据的缓冲区首地址
* -InLenByte:发送数据的字节长度
* -pOutdata:用于接收MF1卡片返回数据的缓冲区首地址
* -pOutLenBit:MF1卡返回数据的位长度
* 出口参数:-pOutdata:用于接收MF1卡片返回数据的缓冲区首地址
* -pOutLenBit:用于MF1卡返回数据位长度的首地址
* 返 回 值:-status:错误代码(MFRC_OK、MFRC_NOTAGERR、MFRC_ERR)
* 说 明:无
***************************************************************************************/
char MFRC_CmdFrame(uint8_t cmd, uint8_t *pInData, uint8_t InLenByte, uint8_t *pOutData, uint16_t *pOutLenBit)
{
uint8_t lastBits;
uint8_t n;
uint32_t i;
char status = MFRC_ERR;
uint8_t irqEn = 0x00;
uint8_t waitFor = 0x00;
/\*根据命令设置标志位\*/
switch(cmd)
{
case MFRC_AUTHENT: //Mifare认证
irqEn = 0x12;
waitFor = 0x10; //idleIRq中断标志
break;
case MFRC_TRANSCEIVE: //发送并接收数据
irqEn = 0x77;
waitFor = 0x30; //RxIRq和idleIRq中断标志
break;
}
/\*发送命令帧前准备\*/
MFRC\_WriteReg(MFRC_ComIEnReg, irqEn | 0x80); //开中断
MFRC\_ClrBitMask(MFRC_ComIrqReg, 0x80); //清除中断标志位SET1
MFRC\_WriteReg(MFRC_CommandReg, MFRC_IDLE); //取消当前命令的执行
MFRC\_SetBitMask(MFRC_FIFOLevelReg, 0x80); //清除FIFO缓冲区及其标志位
/\*发送命令帧\*/
for(i = 0; i < InLenByte; i++) //写入命令参数
{
MFRC\_WriteReg(MFRC_FIFODataReg, pInData[i]);
}
MFRC\_WriteReg(MFRC_CommandReg, cmd); //执行命令
if(cmd == MFRC_TRANSCEIVE)
{
MFRC\_SetBitMask(MFRC_BitFramingReg, 0x80); //启动发送
}
i = 300000; //根据时钟频率调整,操作M1卡最大等待时间25ms
do
{
n = MFRC\_ReadReg(MFRC_ComIrqReg);
i--;
}
while((i != 0) && !(n & 0x01) && !(n & waitFor)); //等待命令完成
MFRC\_ClrBitMask(MFRC_BitFramingReg, 0x80); //停止发送
/\*处理接收的数据\*/
if(i != 0)
{
if(!(MFRC\_ReadReg(MFRC_ErrorReg) & 0x1B))
{
status = MFRC_OK;
if(n & irqEn & 0x01)
{
status = MFRC_NOTAGERR;
}
if(cmd == MFRC_TRANSCEIVE)
{
n = MFRC\_ReadReg(MFRC_FIFOLevelReg);
lastBits = MFRC\_ReadReg(MFRC_ControlReg) & 0x07;
if (lastBits)
{
\*pOutLenBit = (n - 1) \* 8 + lastBits;
}
else
{
\*pOutLenBit = n \* 8;
}
if(n == 0)
{
n = 1;
}
if(n > MFRC_MAXRLEN)
{
n = MFRC_MAXRLEN;
}
for(i = 0; i < n; i++)
{
pOutData[i] = MFRC\_ReadReg(MFRC_FIFODataReg);
}
}
}
else
{
status = MFRC_ERR;
}
}
MFRC\_SetBitMask(MFRC_ControlReg, 0x80); //停止定时器运行
MFRC\_WriteReg(MFRC_CommandReg, MFRC_IDLE); //取消当前命令的执行
return status;
}
### 4.3 第三级最底层函数
* 读一个寄存器
/**************************************************************************************
* 函数名称:MFRC_ReadReg
* 功能描述:读一个寄存器
* 入口参数:-addr:待读的寄存器地址
* 出口参数:无
* 返 回 值:-data:读到寄存器的数据
* 说 明:无
***************************************************************************************/
uint8_t MFRC_ReadReg(uint8_t addr)
{
uint8_t AddrByte, data;
AddrByte = ((addr << 1 ) & 0x7E ) | 0x80; //求出地址字节
RS522_NSS(0); //NSS拉低
SPI2_RW_Byte(AddrByte); //写地址字节
data = SPI2_RW_Byte(0x00); //读数据
RS522_NSS(1); //NSS拉高
return data;
}
* 设置寄存器的位
/**************************************************************************************
* 函数名称:MFRC_SetBitMask
* 功能描述:设置寄存器的位
* 入口参数:-addr:待设置的寄存器地址
* -mask:待设置寄存器的位(可同时设置多个bit)
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void MFRC_SetBitMask(uint8_t addr, uint8_t mask)
{
uint8_t temp;
temp = MFRC_ReadReg(addr); //先读回寄存器的值
MFRC_WriteReg(addr, temp | mask); //处理过的数据再写入寄存器
}
* 清除寄存器的位
/**************************************************************************************
* 函数名称:MFRC_ClrBitMask
* 功能描述:清除寄存器的位
* 入口参数:-addr:待清除的寄存器地址
* -mask:待清除寄存器的位(可同时清除多个bit)
* 出口参数:无
* 返 回 值:无
* 说 明:无
***************************************************************************************/
void MFRC_ClrBitMask(uint8_t addr, uint8_t mask)
{
uint8_t temp;
temp = MFRC_ReadReg(addr); //先读回寄存器的值
MFRC_WriteReg(addr, temp & ~mask); //处理过的数据再写入寄存器
}
### 4.4 头文件
#ifndef _RC522_H
#define _RC522_H
//头文件
//************************************************
#include “gpio.h”//要一些引脚上的宏定义
#include “spi.h”//硬件SPI的定义
#include “printf.h”
#include “main.h”//Laber User上的宏定义
//************************************************
//MFRC522驱动程序
//************************************************
/*MFRC522寄存器定义*/
//PAGE0
#define MFRC_RFU00 0x00
#define MFRC_CommandReg 0x01
#define MFRC_ComIEnReg 0x02
#define MFRC_DivlEnReg 0x03
#define MFRC_ComIrqReg 0x04
#define MFRC_DivIrqReg 0x05
#define MFRC_ErrorReg 0x06
#define MFRC_Status1Reg 0x07
#define MFRC_Status2Reg 0x08
#define MFRC_FIFODataReg 0x09
#define MFRC_FIFOLevelReg 0x0A
#define MFRC_WaterLevelReg 0x0B
#define MFRC_ControlReg 0x0C
#define MFRC_BitFramingReg 0x0D
#define MFRC_CollReg 0x0E
#define MFRC_RFU0F 0x0F
//PAGE1
#define MFRC_RFU10 0x10
#define MFRC_ModeReg 0x11
#define MFRC_TxModeReg 0x12
#define MFRC_RxModeReg 0x13
#define MFRC_TxControlReg 0x14
#define MFRC_TxAutoReg 0x15 //中文手册有误
#define MFRC_TxSelReg 0x16
#define MFRC_RxSelReg 0x17
#define MFRC_RxThresholdReg 0x18
#define MFRC_DemodReg 0x19
#define MFRC_RFU1A 0x1A
#define MFRC_RFU1B 0x1B
#define MFRC_MifareReg 0x1C
#define MFRC_RFU1D 0x1D
#define MFRC_RFU1E 0x1E
#define MFRC_SerialSpeedReg 0x1F
//PAGE2
#define MFRC_RFU20 0x20
#define MFRC_CRCResultRegM 0x21
#define MFRC_CRCResultRegL 0x22
#define MFRC_RFU23 0x23
#define MFRC_ModWidthReg 0x24
#define MFRC_RFU25 0x25
#define MFRC_RFCfgReg 0x26
#define MFRC_GsNReg 0x27
#define MFRC_CWGsCfgReg 0x28
#define MFRC_ModGsCfgReg 0x29
#define MFRC_TModeReg 0x2A
#define MFRC_TPrescalerReg 0x2B
#define MFRC_TReloadRegH 0x2C
#define MFRC_TReloadRegL 0x2D
#define MFRC_TCounterValueRegH 0x2E
#define MFRC_TCounterValueRegL 0x2F
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
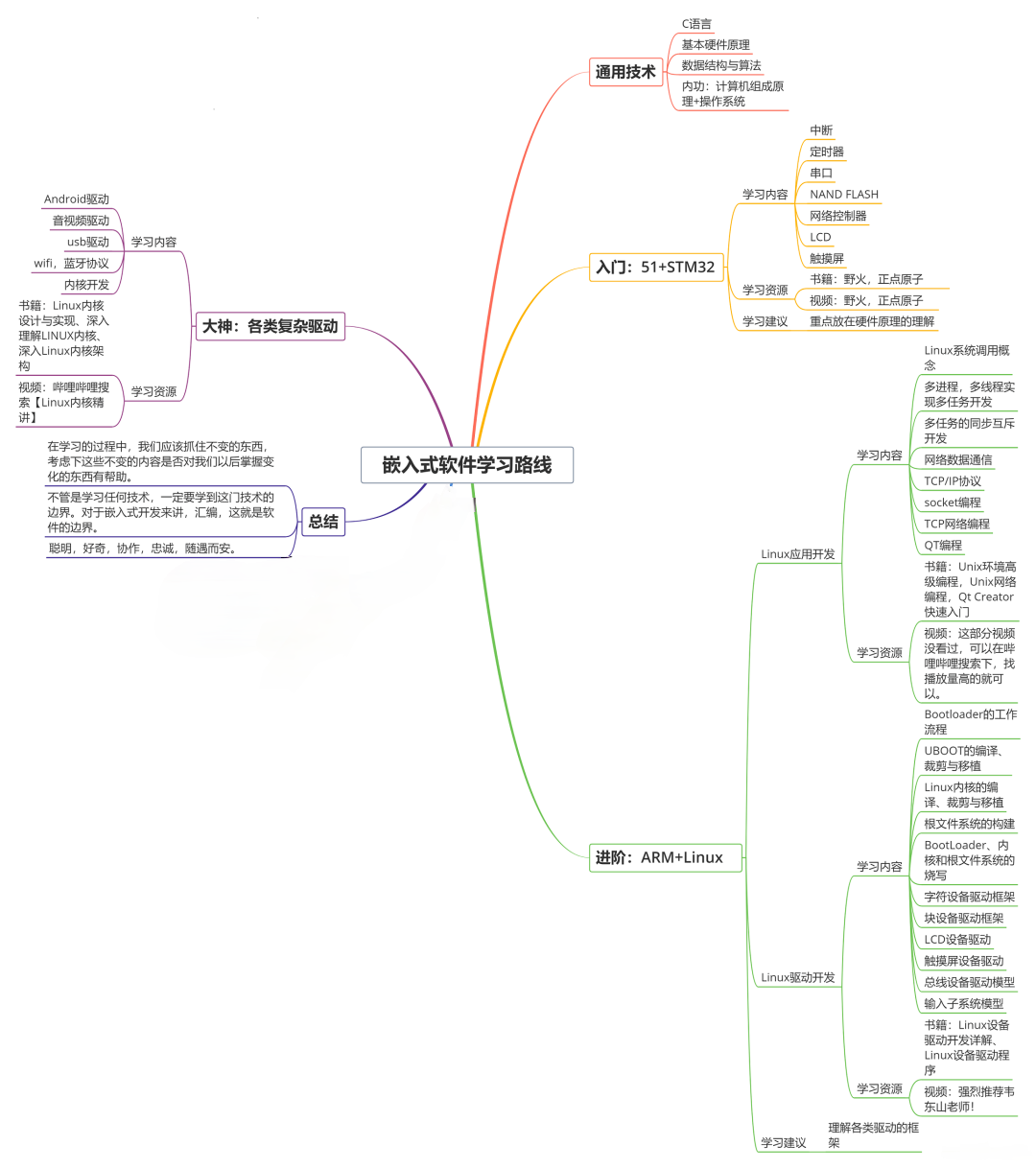
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
adRegH 0x2C
#define MFRC_TReloadRegL 0x2D
#define MFRC_TCounterValueRegH 0x2E
#define MFRC_TCounterValueRegL 0x2F
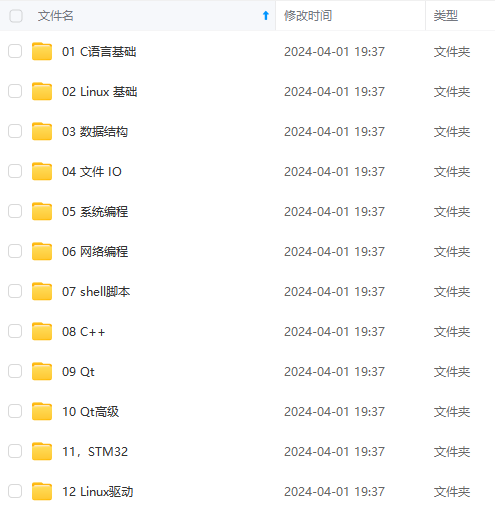
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
[外链图片转存中…(img-j205M7iW-1715909797731)]
[外链图片转存中…(img-k4T4LlEo-1715909797732)]
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 9249
9249











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









