







收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
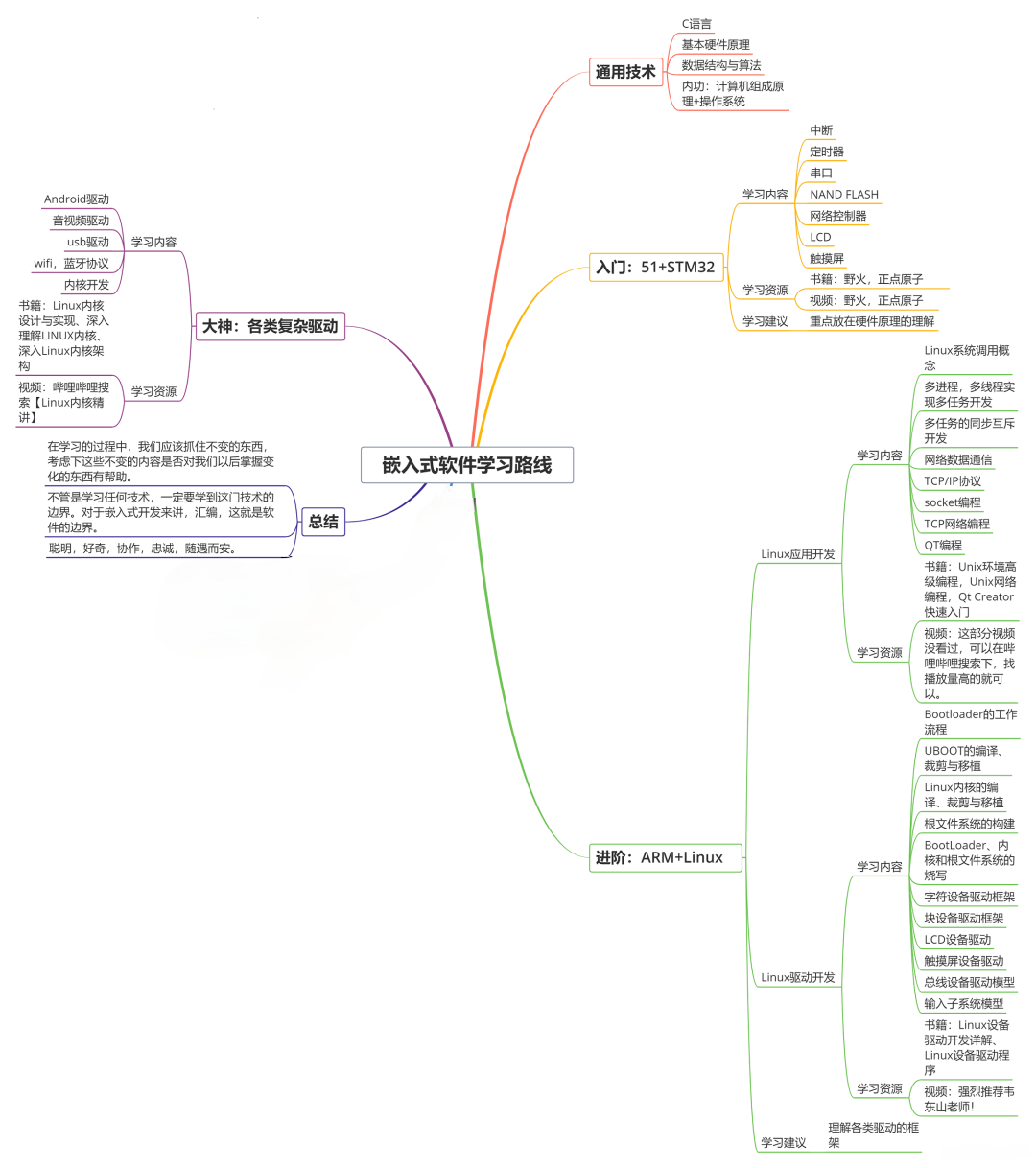
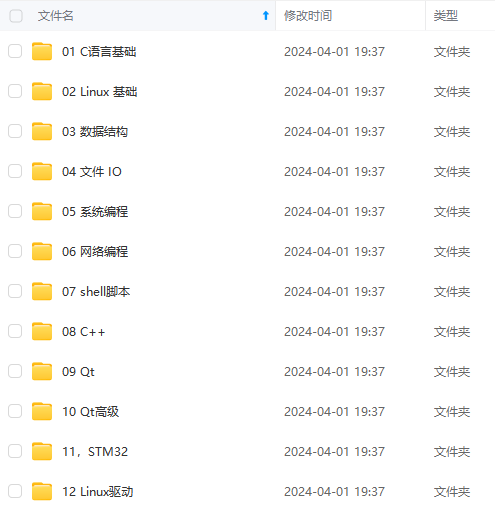
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
小车主控板思路
- 主控板需要完成的功能:
1.接受传输过来的数据
2.根据数据控制电机PWM
3.根据数据控制舵机PWM - 控制电机的PWM实现:
1.一个函数,两个参数:move(dir,speed)
2.dir控制前后,speed控制pwm.
3.如果方向改变需要延迟一定时间 - 控制舵机的pwm实现:
1.一个函数,两个参数:turn(dir,value)
2.dir控制左右,value是设定值控制pwm
3.value需要配合PID算法写好
两个电机控制需要两个tim的pwm,需要四个管脚输出控制正反转.
PID算法实现的时候,舵机有反馈线反馈现在所在的角度.反馈用ADC采样读取
PS: 未测试NRF24L01通信模块前自己留一个串口,使用蓝牙调PID
程序步骤
- 开启时钟(GPIO,TIM, ADC,USART,AFIO)
- 写move函数
- 写PID算法
- 写turn函数
- 配置蓝牙串口
- 调试PID
收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
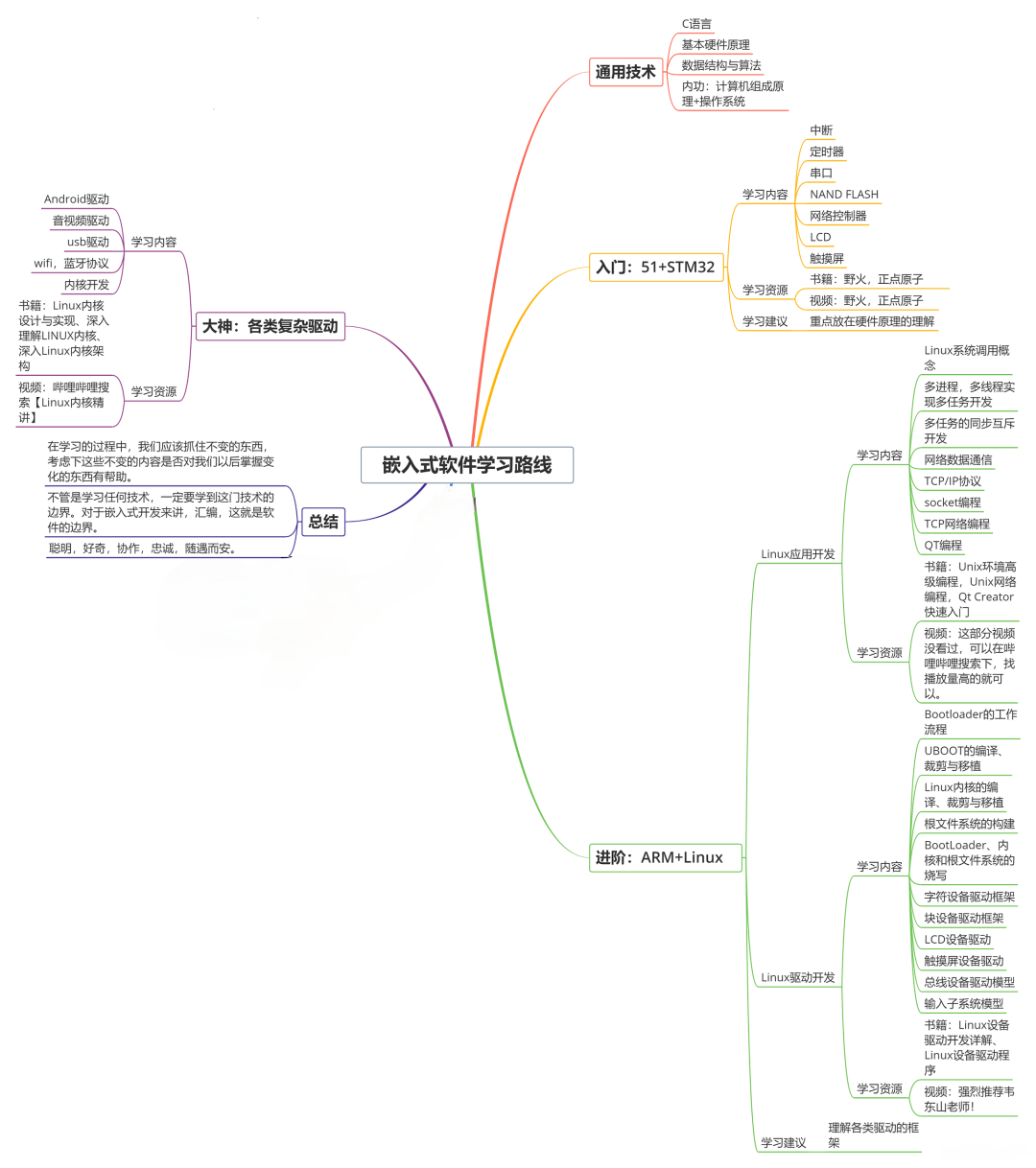
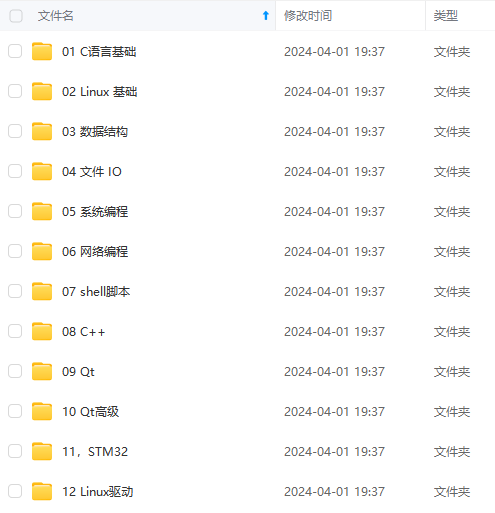
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
正从事IT行业的老鸟或是对IT行业感兴趣的新人**
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!















 4207
4207











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









