







收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
RRT算法原理图解
- 开始
本人很懒,习惯了只看不写。废话少说,直奔主题:原始RRT算法原理图文简介(图都是我自己按照步骤一幅幅画的——闲的蛋疼,但应该比较直观易懂,能被借鉴参考也算我的功德)。
RRT是一种通用方法,原理也较为简单,不受机器人类型和自由度的约束。下面按结合一组过程实例化的图片来讲解一下RRT实现路径规划的原理。
第一步:如图所示:在地图中添加了机器人的起点(蓝色)和终点(黄色),黑色部分表示障碍物。将起点初始化为生长树的根节点(此时的树只包含起点这一个节点,就像还只是一颗种子);

第二步:向地图中的自由空间(非障碍区)随机位置生成一个随机点(图中三角形),也随便举个栗子画一下;

第三步:以刚刚生成的随机点为目标,遍历生长树上的现存节点,计算每个节点到该随机点的距离,筛选出距离最小的节点作为最近点。此时树上仅存在起点(一颗没发芽的种子),所以直接选取起点为最近点。以最近点和随机点的连线(图中我牵的红线)为生长方向(随机点仅起确定生长方向的作用);

第四步:从最近点向目标点生长,生长的长度为步长,(每一次生长的步长是固定的,步长看情况设定:太短导致算法搜索速度变慢,太长导致生长会跨过障碍物),从此时的最近点也就是起点沿着生长方向生长一个步长得到一个生长点(空心圆圈);

种子终于要发芽了!
第五步:判断新生成的生长点是否与障碍物有碰撞,若没有碰撞则将生长点添加到树上(发芽成功),若碰撞了就剔除该生长点,生长作废(发芽失败,等待重新发芽),图中很明显是没有碰到障碍物,发芽成功!此时的生长树上就存在了两个节点(蓝色);

第六步:再次生成随机点(我们根据图慢慢来讲解啊)

第七步:以刚刚生成的随机点为目标,遍历生长树上的现存节点,计算每个节点到该随机点的距离,筛选出距离最小的节点作为最近点。和上面第三步相同,计算筛选出此时生长树上离随机节点最近的最近点依然是起点,然后以最近点和随机点的连线为生长方向(继续牵线);

第八步:重复了第四步:从最近点向目标点生长,得到了新的生长点;

第九步:判断是否成功,又重复了第五步。。。很明显又成功了,你说气不气人?把新的生长点纳入生长树中(现在树上已经有三个节点了)

第十步:再来!重复操作,加随机点!看图!(争取把多种情况实例化说一遍,针对小白)

第十一步:同第三步,这次筛选出来的最近点终于不是起点了,而是第九步最新纳入生长树上的节点,直接牵线;

第十二步:如图,最近点向随机节点靠近一个步长,生成了一个生长点(长到了障碍物里面)。


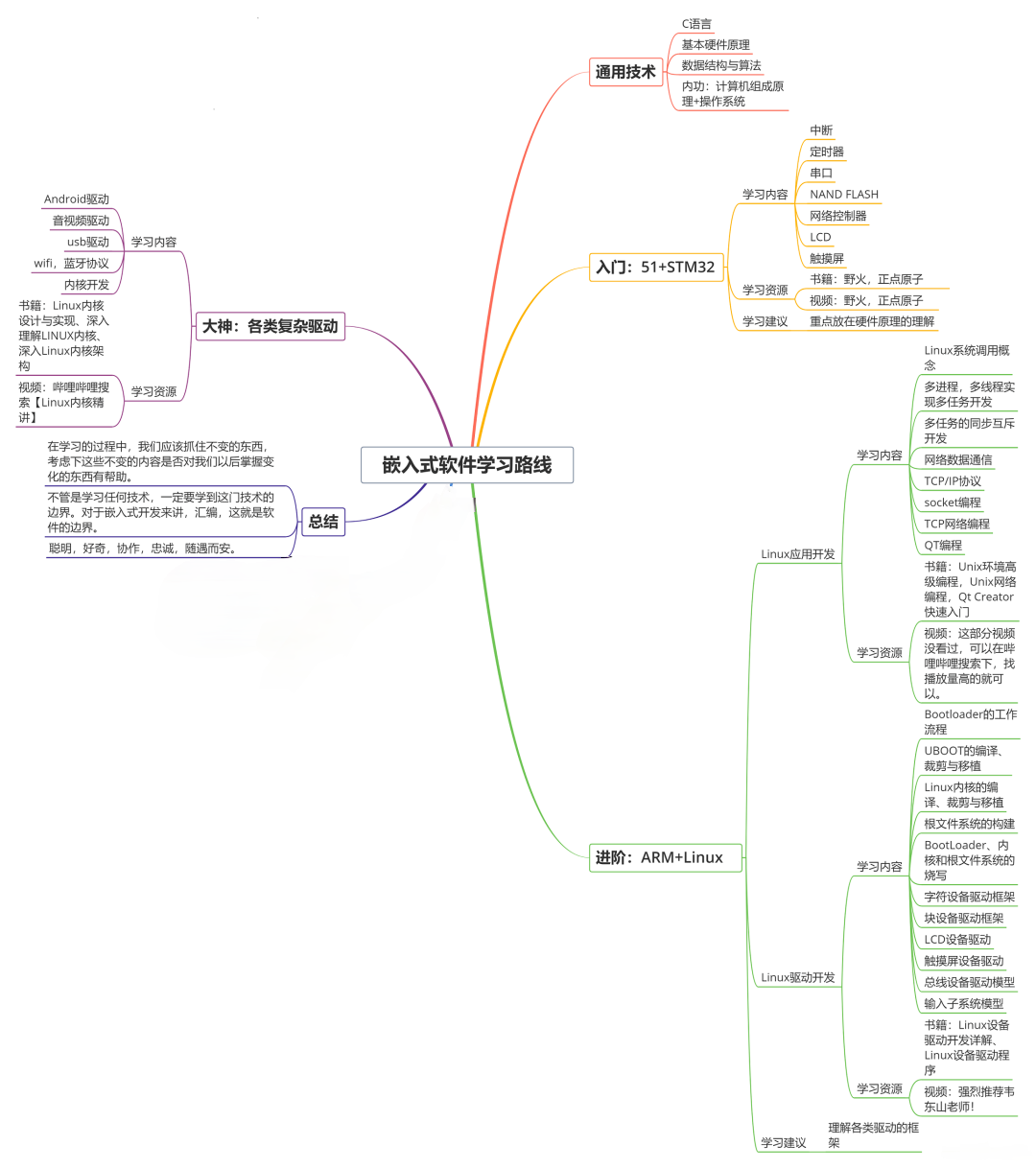
既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!
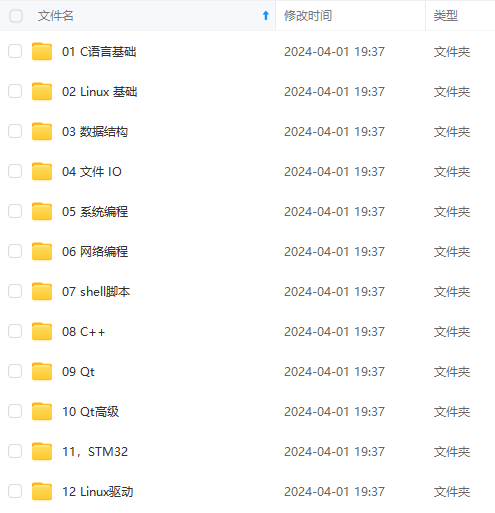
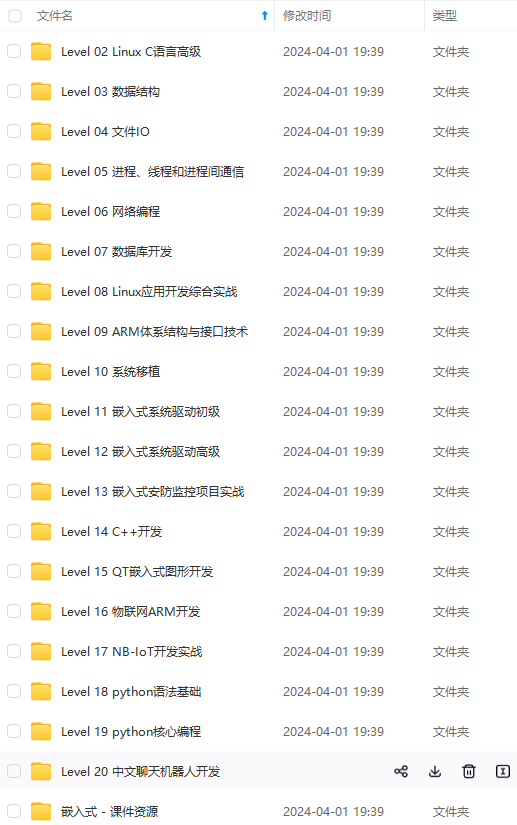
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)















 3万+
3万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









