








既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新
5.2 I2C协议层
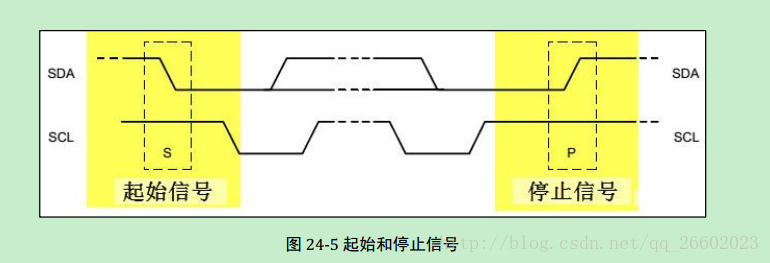
5.3 数据的起始信号与停止信号
5.4数据有效性
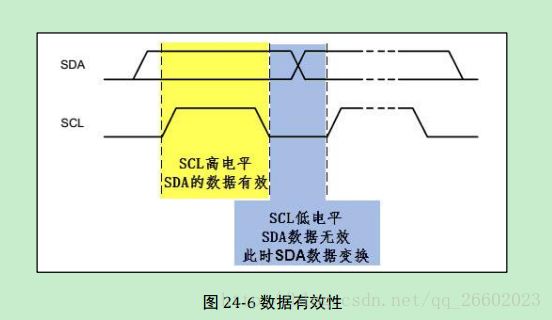
I2C 协议在 SCL 高电平时对 SDA 信号采样, SCL 低电平时 SDA准备下一个数据。
SPI
标准SPI
标准SPI通常就称SPI,它是一种串行外设接口规范,有4根引脚信号:clk , cs, mosi, miso
Dual SPI
它只是针对SPI Flash而言,不是针对所有SPI外设。对于SPI Flash,全双工并不常用,因此扩展了mosi和miso的用法,让它们工作在半双工,用以加倍数据传输。也就是对于Dual SPI Flash,可以发送一个命令字节进入dual mode,这样mosi变成SIO0(serial io 0),mosi变成SIO1(serial io 1),这样一个时钟周期内就能传输2个bit数据,加倍了数据传输
Qual SPI
与Dual SPI类似,也是针对SPI Flash,Qual SPI Flash增加了两根I/O线(SIO2,SIO3),目的是一个时钟内传输4个bit
所以对于SPI Flash,有标准spi flash,dual spi , qual spi 三种类型,分别对应3-wire, 4-wire, 6-wire,在相同clock下,线数越多,传输速率越高。
btw:spi flash一般为NOR Flash
SPI接口介绍
SPI是由美国摩托罗拉公司推出的一种同步串行传输规范,常作为单片机外设芯片串行扩展接 口。SPI有4个引脚:SS(从器件选择线)、SDO(串行数据输出线)、SDI(串行数据输入线)和SCK(同步串行时钟线)。SPI可以用全双工通信 方式同时发送和接收8(16)位数据,过程如下:主机启动发送过程,送出时钟脉冲信号,主移位寄存器的数据通过SDO移入到从移位寄存器,同时从移位寄存 器中的数据通过SDI移人到主移位寄存器中。8(16)个时钟脉冲过后,时钟停顿,主移位寄存器中的8(16)位数据全部移人到从移位寄存器中,随即又被 自动装入从接收缓冲器中,从机接收缓冲器满标志位(BF)和中断标志位(SSPIF)置“1”。同理,从移位寄存器中的8位数据全部移入到主寄存器中,随 即又被自动装入到主接收缓冲器中.主接收缓冲器满标志位(BF)和中断标志位(SSPIF)置“1”。主CPU检测到主接收缓冲器的满标志位或者中断标志 位置1后,就可以读取接收缓冲器中的数据。同样,从CPU检测到从接收缓冲器满标志位或中断标志位置1后,就可以读取接收缓冲器中的数据,这样就完成了一 次相互通信过程。这里设置dsPIC30F6014为主控制器,ISD4002为从器件,通过SPI口完成通信控制的过程。
SPI总线协议
SPI是一个环形总线结构,由ss(cs)、sck、sdi、sdo构成,其时序其实很简单,主要是在sck的控制下,两个双向移位寄存器进行数据交换。
假设下面的8位寄存器装的是待发送的数据10101010,上升沿发送、下降沿接收、高位先发送。
那么第一个上升沿来的时候 数据将会是sdo=1;寄存器=0101010x。下降沿到来的时候,sdi上的电平将所存到寄存器中去,那么这时寄存器=0101010sdi,这样在 8个时钟脉冲以后,两个寄存器的内容互相交换一次。这样就完成里一个spi时序。
例子:
假设主机和从机初始化就绪:并且主机的sbuff=0xaa,从机的sbuff=0x55,下面将分步对spi的8个时钟周期的数据情况演示一遍:假设上升沿发送数据
脉冲 主机sbuff 从机sbuff sdi sdo
0 10101010 01010101 0 0
1上 0101010x 1010101x 0 1
1下 01010100 10101011 0 1
2上 1010100x 0101011x 1 0
2下 10101001 01010110 1 0
3上 0101001x 1010110x 0 1
3下 01010010 10101101 0 1
4上 1010010x 0101101x 1 0
4下 10100101 01011010 1 0
5上 0100101x 1011010x 0 1
5下 01001010 10110101 0 1
6上 1001010x 0110101x 1 0
6下 10010101 01101010 1 0
7上 0010101x 1101010x 0 1
7下 00101010 11010101 0 1
8上 0101010x 1010101x 1 0
8下 01010101 10101010 1 0
这 样就完成了两个寄存器8位的交换,上面的上表示上升沿、下表示下降沿,sdi、sdo相对于主机而言的。其中ss引脚作为主机的时候,从机可以把它拉底被 动选为从机,作为从机的是时候,可以作为片选脚用。根据以上分析,一个完整的传送周期是16位,即两个字节,因为,首先主机要发送命令过去,然后从机根据 主机的名准备数据,主机在下一个8位时钟周期才把数据读回来
SPI 总线是Motorola公司推出的三线同步接口,同步串行3线方式进行通信:一条时钟线SCK,一条数据输入线MOSI,一条数据输出线MISO;用于 CPU与各种外围器件进行全双工、同步串行通讯。SPI主要特点有:可以同时发出和接收串行数据;可以当作主机或从机工作;提供频率可编程时钟;发送结束 中断标志;写冲突保护;总线竞争保护等。图3示出SPI总线工作的四种方式,其中使用的最为广泛的是SPI0和SPI3方式(实线表示):
SPI总线接口及时序
SPI 模块为了和外设进行数据交换,根据外设工作要求,其输出串行同步时钟极性和相位可以进行配置,时钟极性(CPOL)对传输协议没有重大的影响。如果 CPOL=0,串行同步时钟的空闲状态为低电平;如果CPOL=1,串行同步时钟的空闲状态为高电平。时钟相位(CPHA)能够配置用于选择两种不同的传 输协议之一进行数据传输。如果CPHA=0,在串行同步时钟的第一个跳变沿(上升或下降)数据被采样;如果CPHA=1,在串行同步时钟的第二个跳变沿 (上升或下降)数据被采样。SPI主模块和与之通信的外设音时钟相位和极性应该一致。SPI总线接口时序如下所示。

SPI功能模块的设计
根据功能定义及SPI的工作原理,将整个IP Core分为8个子模块:uC接口模块、时钟分频模块、发送数据FIFO模块、接收数据FIFO模块、状态机模块、发送数据逻辑模块、接收数据逻辑模块以及中断形式模块。
深入分析SPI的四种传输协议可以发现,根据一种协议,只要对串行同步时钟进行转换,就能得到其余的三种协议。为了简化设计规定,如果要连续传输多个数据,在两个数据传输之间插入一个串行时钟的空闲等待,这样状态机只需两种状态(空闲和工作)就能正确工作。
CAN
CAN 是Controller Area Network 的缩写(以下称为CAN),是ISO国际标准化的串行通信协议。
它的通信速度较快,通信距离远,最高1Mbps(距离小于40米),最远可达10千里(速率低于5Kbps)。在总线空闲时,所有单元都可以发送消息(多主控制),而两个以上的单元同时开始发送消息时,根据标识符(Identifier 以下称为 ID)决定优先级。ID 并不是表示发送的目的地址,而是表示访问总线的消息的优先级。两个以上的单元同时开始发送消息时,对各消息ID 的每个位进行逐个仲裁比较。仲裁获胜(被判定为优先级最高)的单元可继续发送消息,仲裁失利的单元则立刻停止发送而进行接收工作。
CAN协议经过ISO标准化后有两个标准:ISO11898标准和ISO11519-2标准。其中ISO11898是针对通信速率为125Kbps~1Mbps的高速通信标准,而ISO11519-2是针对通信速率为125Kbps以下的低速通信标准。
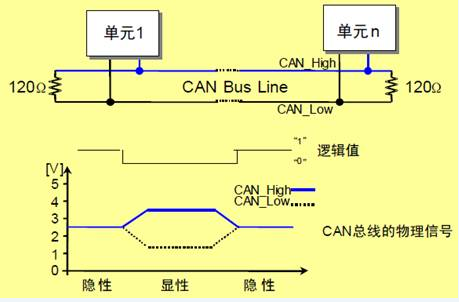
本章,我们使用的是450Kbps的通信速率,使用的是ISO11898标准,该标准的物理层特征如图1所示:
从该特性可以看出,显性电平对应逻辑0,CAN_H和CAN_L之差为2.5V左右。而隐性电平对应逻辑1,CAN_H和CAN_L之差为0V。在总线上显性电平具有优先权,只要有一个单元输出显性电平,总线上即为显性电平。而隐形电平则具有包容的意味,只有所有的单元都输出隐性电平,总线上才为隐性电平(显性电平比隐性电平更强)。另外,在CAN总线的起止端都有一个120Ω的终端电阻,来做阻抗匹配,以减少回波反射。
CAN协议是通过以下5种类型的帧进行的:
l 数据帧
l 摇控帧
l 错误帧
l 过载帧
l 帧间隔
另外,数据帧和遥控帧有标准格式和扩展格式两种格式。标准格式有11 个位的标识符(ID),扩展格式有29 个位的ID。
1.数据帧
数据帧一般由7个段构成,即:
(1) 帧起始。表示数据帧开始的段。
(2) 仲裁段。表示该帧优先级的段。
(3) 控制段。表示数据的字节数及保留位的段。
(4) 数据段。数据的内容,一帧可发送0~8个字节的数据。
(5) CRC段。检查帧的传输错误的段。
(6) ACK段。表示确认正常接收的段。
(7) 帧结束。表示数据帧结束的段。
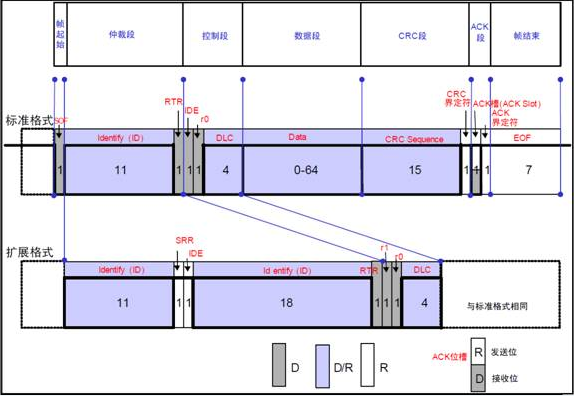
如图2为数据帧的构成:
图中D表示显性电平,R表示隐形电平(下同)。
帧起始,标准帧和扩展帧都是由1个位的显性电平表示帧起始。
仲裁段,表示数据优先级的段,标准帧和扩展帧格式在本段有所区别,标准格式的ID 有11 个位。从ID28 到ID18 被依次发送。禁止高7 位都为隐性(禁止设定:ID=1111111XXXX,原因:can通信采用的是NZR编码,而can的仲裁是靠数据帧中的ID部分来实现的,全为隐性状态,可能导致仲裁失败!)。扩展格式的 ID 有29 个位。基本ID 从ID28 到ID18,扩展ID 由ID17 到ID0 表示。基本ID 和标准格式的ID 相同。禁止高7 位都为隐性(禁止设定:基本ID=1111111XXXX)。
其中RTR位用于标识是否是远程帧(0,数据帧;1,远程帧),IDE位为标识符选择位(0,使用标准标识符;1,使用扩展标识符),SRR位为代替远程请求位,为隐性位,它代替了标准帧中的RTR位。
控制段,由6个位构成,表示数据段的字节数。
数据段,该段可包含0~8个字节的数据。从最高位(MSB)开始输出,标准帧和扩展帧在这个段的定义都是一样的。
CRC段,该段用于检查帧传输错误。由15个位的CRC顺序和1个位的CRC界定符(用于分隔的位)组成,标准帧和扩展帧在这个段的格式也是相同的。
ACK段,此段用来确认是否正常接收。由ACK槽(ACK Slot)和ACK界定符2个位组成。标准帧和扩展帧在这个段的格式也是相同的。
2.远程帧(遥控帧)
远程帧作用:只发送ID号,不发送数据,它将ID发给另一台设备,请求另一台设备返回数据。
3.CAN总线波特率设置
位速率:由发送单元在非同步的情况下发送的每秒钟的位数称为位速率。一个位可分为 4 段。
l 同步段(SS)
l 传播时间段(PTS)
l 相位缓冲段1(PBS1)
l 相位缓冲段2(PBS2)
这些段又由可称为 Time Quantum(以下称为Tq)的最小时间单位构成。
1 位分为4 个段,每个段又由若干个Tq 构成,这称为位时序。
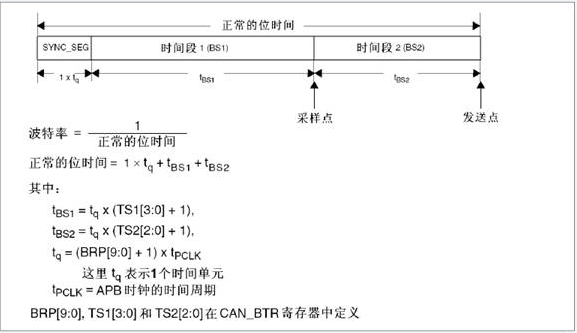
1 位由多少个Tq 构成、每个段又由多少个Tq 构成等,可以任意设定位时序。通过设定位时序,多个单元可同时采样,也可任意设定采样点。STM32把传播时间段和相位缓冲段1(STM32称之为时间段1)合并了,所以STM32的CAN一个位只有3段:同步段(SYNC_SEG)、时间段1(BS1)和时间段2(BS2)。STM32的BS1段可以设置为1~16个时间单元,刚好等于我们上面介绍的传播时间段和相位缓冲段1之和。STM32的CAN位时序如图3所示:
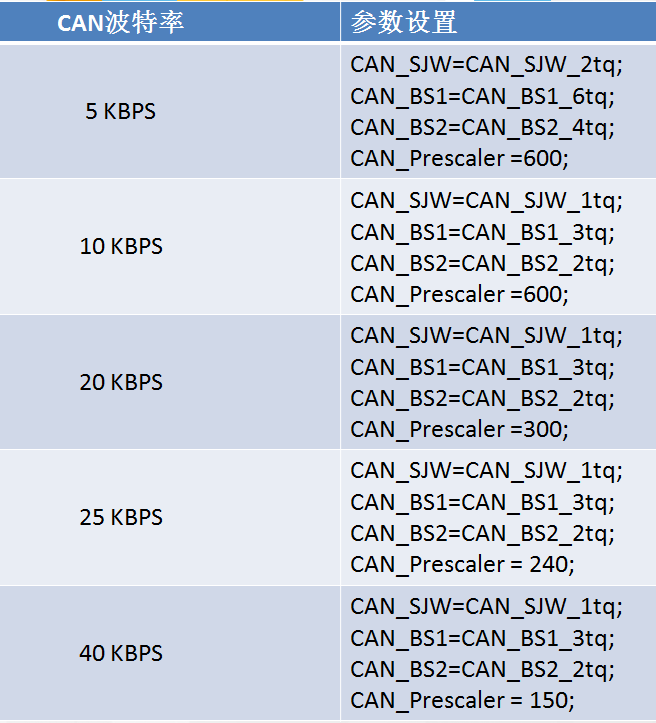
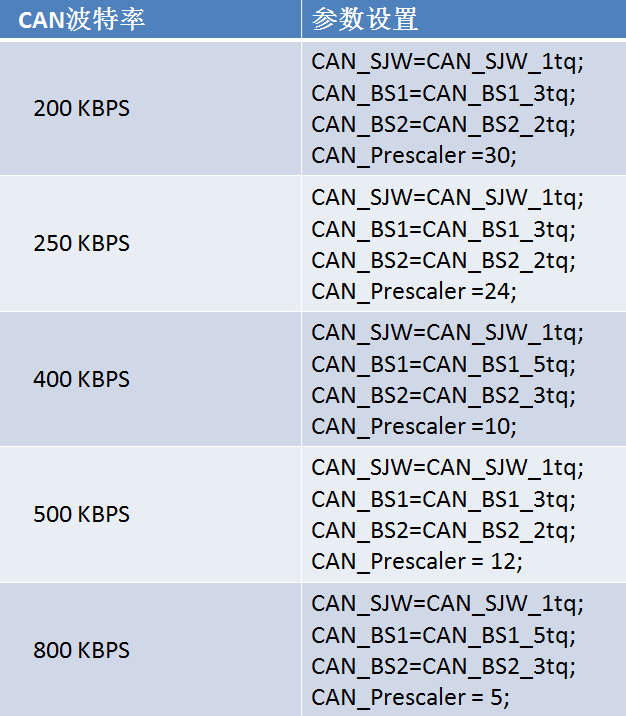
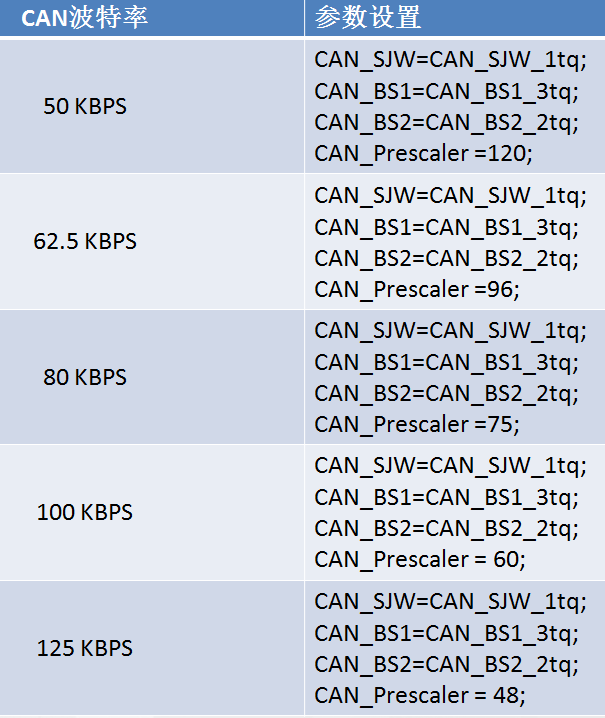
图中还给出了CAN波特率的计算公式,我们只需要知道BS1和BS2的设置,以及APB1的时钟频率(一般为36Mhz),就可以方便的计算出波特率。比如设置TS1=6、TS2=7和BRP=4,在APB1频率为36Mhz的条件下,即可得到CAN通信的波特率=36000/[(7+8+1)*5]=450Kbps。图4是常见CAN总线的波特率设置:

4.CAN总线屏蔽滤波
STM32的标识符屏蔽滤波目的是减少了CPU处理CAN通信的开销。STM32的过滤器组最多有28个(互联型),但是STM32F103ZET6只有14个(增强型),每个滤波器组x由2个32为寄存器,CAN_FxR1和CAN_FxR2组成。
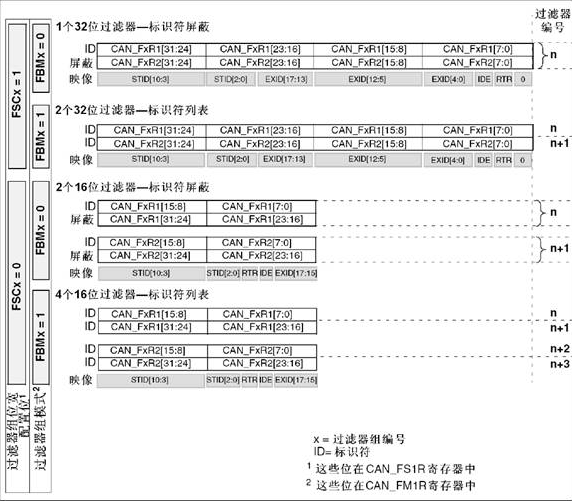
STM32每个过滤器组的位宽都可以独立配置,以满足应用程序的不同需求。根据位宽的不同,每个过滤器组可提供:
● 1个32位过滤器,包括:STDID[10:0]、EXTID[17:0]、IDE和RTR位
● 2个16位过滤器,包括:STDID[10:0]、IDE、RTR和EXTID[17:15]位
此外过滤器可配置为,屏蔽位模式和标识符列表模式。
在屏蔽位模式下,标识符寄存器和屏蔽寄存器一起,指定报文标识符的任何一位,应该按照“必须匹配”或“不用关心”处理。
而在标识符列表模式下,屏蔽寄存器也被当作标识符寄存器用。因此,不是采用一个标识符加一个屏蔽位的方式,而是使用2个标识符寄存器。接收报文标识符的每一位都必须跟过滤器标识符相同。
滤波过程举例:
现有ID号为001,002,003,004的4个CAN,他们都能发送、接收广播报文。站在CAN002号角度看,它所能接受到报文的ID是通过滤波器滤波后的ID号,即这里将过滤方式分两种,一是002号能接收多个ID报文(屏蔽滤波模式),二是002号只能接收一个ID报文(标识符列表模式)。
屏蔽滤波模式:
标识符寄存器:0 0 1
屏蔽寄存器: 1 0 1
报文ID号: 0 0/1 1
如果设置标识符寄存器和屏蔽寄存器为001和101;屏蔽滤波模式的作用是如果屏蔽寄存器某位上出现了1,则报文ID号对应的那位要与标识符寄存器那位一致,即“必须匹配”原则,所以标识符寄存器第一位0,报文ID号第一位也必须为0,因为屏蔽寄存器第一位为1,类似的第三位也是这样。如果屏蔽寄存器某位上出现了0,则报文ID号对应的那位可与标识符寄存器那位不一致也可以一致,即“不用关心”原则,第二位由于屏蔽寄存器上为0,所以报文ID号可以与标识符寄存器上的0一致也可以不一致,故报文ID号第二位为0/1。所以002号(010)可以接受来自001号(001)和003号(011)的报文。
标识符列表模式:将设置的屏蔽寄存器改为标识符寄存器
标识符寄存器:0 0 1
标识符寄存器: 0 0 1
报文ID号: 0 0 1
如果设置2个标识符寄存器为001和001;报文ID号必须与这两个标识符寄存器所对应的位相等。所以002号CAN只能接受001号的报文。
下图5是CAN_FMR寄存器,可以配置过滤器组的寄存器位数16还是32位,工作模式以及它和标准帧、扩展帧位数的对应关系,方便我们在不同的帧模式(标准数据帧、扩展数据帧、标准远程帧、扩展远程帧)下对报文ID进行过滤。
5.CAN的发送与接收流程
5.1CAN 发送流程
发送报文的流程为:应用程序选择1个空发送邮箱;设置标识符、数据长度和待发送数据;然后CAN_TIxR寄存器的TXRQ位置1,来请求发送。TXRQ位置1后,邮箱就不再是空邮箱;而一旦邮箱不再为空,软件对邮箱寄存器就不再有写的权限。TXRQ位置1后,邮箱马上进入挂号状态,并等待成为最高优先级的邮箱。一旦邮箱成为最高优先级的邮箱,其状态就变为预定发送状态。当CAN总线进入空闲状态,预定发送邮箱中的报文就马上被发送(进入发送状态)。邮箱中的报文被成功发送后,它马上变为空邮箱,硬件相应地对CAN_TSR寄存器的RQCP和TXOK位置1,此时可以设置发送中断(入口地址:USB_HP_CAN_TX_IRQChannel()),进入中断置can_tx_flag_success=1,来表明一次成功发送。
5.2CAN接收流程
接收到的报文,被存储在3级邮箱深度的FIFO中。FIFO完全由硬件来管理,从而节省了CPU的处理负荷,简化了软件并保证了数据的一致性。应用程序只能通过读取FIFO输出邮箱,来读取FIFO中最先收到的报文。根据CAN协议,当报文被正确接收(直到EOF域的最后1位都没有错误),且通过了标识符过滤,那么该报文被认为是有效报文。接收相关的中断条件:
一旦往FIFO存入1个报文,硬件就会更新FMP[1:0]位,并且如果CAN_IER寄存器的FMPIE位为1,那么就会产生一个中断请求,可以进入接收中断读取接收的数据(入口地址:USB_LP_CAN_RX0_IRQChannel())。
当FIFO变满时(即第3个报文被存入),CAN_RFxR寄存器的FULL位就被置1,并且如果CAN_IER寄存器的FFIE位为1,那么就会产生一个满中断请求。
在溢出的情况下,FOVR位被置1,并且如果CAN_IER寄存器的FOVIE位为1,那么就会产生一个溢出中断请求。
6.CAN总线应用——CAN与上位机通讯实验(基于stm32f103zet6)
6.1硬件设计
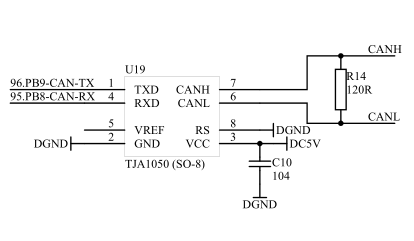
本文的TX与RX采用PB9和PB8(端口重映射),他们与CAN收发器连接,CAN收发器(芯片有很多,如:TJA1050;SN65VD230)与USB/CAN转换器连接到PC机上,具体电路如图6。
CAN收发器:
usb/can转换器:某宝上有卖,100多就行。
6.2程序
#include "pbdata.h"
void RCC_Configuration(void);
void GPIO_Configuration(void);
void NVIC_Configuration(void);
void CAN_Configuration(void);
int main(void)
{
CanTxMsg TxMessage;
RCC_Configuration(); //时钟配置
GPIO_Configuration();//端口配置
NVIC_Configuration();
CAN_Configuration();
while(1)
{
//每隔1s发送一个报文,一个报文8B
TxMessage.StdId=0xFF00>>5;//标准帧只有31-21位,对于16位寄存器而言,低五位为扩展帧,所以在写16位数据时,最后5位置0
TxMessage.ExtId=0;
TxMessage.IDE=CAN_ID_STD;//选择发送标准帧
//TxMessage.StdId=0;
//TxMessage.ExtId=0xFFFFFFFF>>3;//扩展帧只有18位,在32位数据时最后三位为(IDE,RTR,TXRQ),所以在写扩展帧时,最后三位要置0
//TxMessage.IDE=CAN_ID_EXT;
//发送扩展帧
TxMessage.RTR=CAN_RTR_DATA;//发送的是数据帧
//TxMessage.RTR=CAN_RTR_REMOTE;//远程帧,只发送ID,不发送数据,将ID发给另一台设备,请求另一台设备返回数据
TxMessage.DLC=8;//数据长度8B
TxMessage.Data[0]=0x11;
TxMessage.Data[1]=0x22;
TxMessage.Data[2]=0x33;
TxMessage.Data[3]=0x44;
TxMessage.Data[4]=0x55;
TxMessage.Data[5]=0x66;
TxMessage.Data[6]=0x77;
TxMessage.Data[7]=0x88;
//数据内容
can_tx_success_flag = 0;
CAN_Transmit(CAN1,&tx_message);//can发送数据
while(can_tx_success_flag == 0);//是否一次发送成功
delay_ms(1000);//1s一次
}
}
void RCC_Configuration(void)
{
SystemInit();//72m
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1,ENABLE);
}
void GPIO_Configuration(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
//端口重映射
GPIO_PinRemapConfig(GPIO_Remap1_CAN1,ENABLE);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_8;//RX
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_IPU;
GPIO_Init(GPIOB,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_9;//TX
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;
GPIO_Init(GPIOB,&GPIO_InitStructure);
}
void NVIC_Configuration(void)
{
NVIC_InitTypeDef NVIC_InitStructure;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);
NVIC_InitStructure.NVIC_IRQChannel = USB_LP_CAN1_RX0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void CAN_Configuration(void)
{
//硬件上有个can/usb才能与PC通讯
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
CAN_DeInit(CAN1);
CAN_StructInit(&CAN_InitStructure);
//关闭时间触发模式
CAN_InitStructure.CAN_TTCM=DISABLE;
//关闭自动离线管理
CAN_InitStructure.CAN_ABOM=DISABLE;
//关闭自动唤醒模式
CAN_InitStructure.CAN_AWUM=DISABLE;
//禁止报文自动重传
CAN_InitStructure.CAN_NART=DISABLE;
//FIFO溢出时报文覆盖源文件
CAN_InitStructure.CAN_RFLM=DISABLE;
//报文发送优先级取决于ID号,本次只用了一个发送邮箱,关闭TXFP
CAN_InitStructure.CAN_TXFP=DISABLE;
//工作模式(正常)
CAN_InitStructure.CAN_Mode=CAN_Mode_Normal;
//波特率设置125 KBPS


**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新**
**[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618679757)**
)
CAN_InitStructure.CAN_Mode=CAN_Mode_Normal;
//波特率设置125 KBPS
[外链图片转存中...(img-wkuTklgg-1715633703858)]
[外链图片转存中...(img-qVUSrCBJ-1715633703859)]
**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新**
**[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618679757)**
















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









