







收集整理了一份《2024年最新物联网嵌入式全套学习资料》,初衷也很简单,就是希望能够帮助到想自学提升的朋友。
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
一个人可以走的很快,但一群人才能走的更远!不论你是正从事IT行业的老鸟或是对IT行业感兴趣的新人
都欢迎加入我们的的圈子(技术交流、学习资源、职场吐槽、大厂内推、面试辅导),让我们一起学习成长!
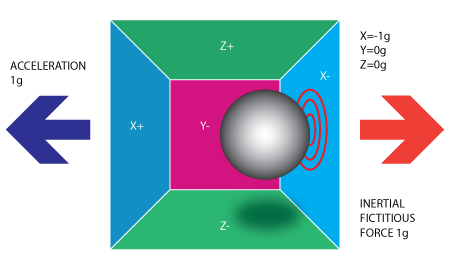 为了保证数据的物理意义,MPU6050的加速度计是以假想球在三轴上座标值的相反数作为三个轴的加速度值。当假想球的位置偏向一个轴的正向时,该轴的加速度读数为负值,当假想球的位置偏向一个轴的负向时,该轴的加速度读数为正值。
为了保证数据的物理意义,MPU6050的加速度计是以假想球在三轴上座标值的相反数作为三个轴的加速度值。当假想球的位置偏向一个轴的正向时,该轴的加速度读数为负值,当假想球的位置偏向一个轴的负向时,该轴的加速度读数为正值。
根据以上分析,当我们把MPU6050芯片水平放于地方,芯片表面朝向天空,此时由于受到地球重力的作用, 假想球的位置偏向Z轴的负向,因此Z轴的加速度读数应为正,且在理想情况下应为g。注意,此加速度的物理意义并不是重力加速度,而是自身运动的加速度,可以这样理解:正因为其自身运动的加速度与重力加速度大小相等方向相反,芯片才能保持静止。
3.2 Roll-pitch-yaw模型与姿态计算
表示飞行器当前飞行姿态的一个通用模型就是建立下图所示坐标系,并用Roll表示绕X轴的旋转,Pitch表示绕Y轴的旋转,Yaw表示绕Z轴的旋转。
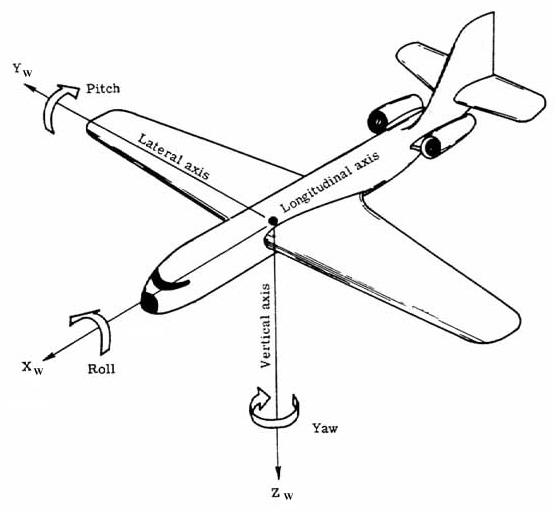 由于MPU6050可以获取三个轴向上的加速度,而地球重力则是长期存在且永远竖直向下,因此我们可以根据重力加速度相对于芯片的指向为参考算得当前姿态。
由于MPU6050可以获取三个轴向上的加速度,而地球重力则是长期存在且永远竖直向下,因此我们可以根据重力加速度相对于芯片的指向为参考算得当前姿态。
为方便起见,我们让芯片正面朝下固定在上图飞机上,且座标系与飞机的坐标系完全重合,以三个轴向上的加速度为分量,可构成加速度向量 。假设当前芯片处于匀速直线运动状态,那么
。假设当前芯片处于匀速直线运动状态,那么 应垂直于地面上向,即指向Z轴负方向,模长为
应垂直于地面上向,即指向Z轴负方向,模长为 (与重力加速度大小相等,方向相反,见3.1节)。若芯片(座标系)发生旋转,由于加速度向量
(与重力加速度大小相等,方向相反,见3.1节)。若芯片(座标系)发生旋转,由于加速度向量 仍然竖直向上,所以Z轴负方向将不再与
仍然竖直向上,所以Z轴负方向将不再与
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









