









既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
- 中文名:通用输入/输出
- 英语缩写:GPIO
- 英语全称:General Purpose Input/Output
2.模数转换ADC与数模转换DAC
- 中文名:模数转换
- 英语缩写:ADC
- 英语全称:Analog-to-Digital Converter
- 中文名:数字模拟转换
- 英语缩写:DAC
- 英语全称:Digital-to-Analog Converter
3.脉冲宽度调制器PWM
- 中文名:脉冲宽度调制
- 英语缩写:PWM
- 英语全称:Pulse Width Modulation
4.看门狗
- 中文名:看门狗
- 英语缩写:WDT
- 英语全称:Watchdog Timer
5.液晶显示(LCD)
- 中文名:液晶显示
- 英语缩写:LCD
- 英语全称:Liquid Crystal Display
6.发光二极管(LED)
- 中文名:发光二极管
- 英语缩写:LED
- 英语全称:Light Emitting Diode
7.键盘
- 中文名:键盘
- 英语缩写:KBD
- 英语全称:Keyboard
与通信相关的术语
1.并行通信(同时发送多位)
- 中文名:并行通信
- 英语缩写:Parallel Comm.
- 英语全称:Parallel Communication
2.串行通信UART(一位一位发送)
- 中文名:串行通信
- 英语缩写:UART
- 英语全称:Universal Asynchronous Receiver
3.串行外设接口SPI
- 中文名:串行外设接口
- 英语缩写:SPI
- 英语全称:Serial Peripheral Interface
4.集成电路互联总线I2C
- 中文名:集成电路互联总线
- 英语缩写:I2C
- 英语全称:Inter-Integrated Circuit
5.通用串行总线USB
- 中文名:通用串行总线
- 英语缩写:USB
- 英语全称:Universal Serial Bus
6.控制器局域网CAN
- 中文名:控制器局域网
- 英语缩写:CAN
- 英语全称:Controller Area Network
7.边界扫描测试协议JTAG(工厂测试芯片)
- 中文名:边界扫描测试协议
- 英语缩写:BSTP
- 英语全称:Boundary Scan Test Protocol
8.串行线调试技术SWD
- 中文名:串行线调试技术
- 英语缩写:SWD
- 英语全称:Serial Wire Debug
运行实例:
编译、下载与运行第一个嵌入式程序
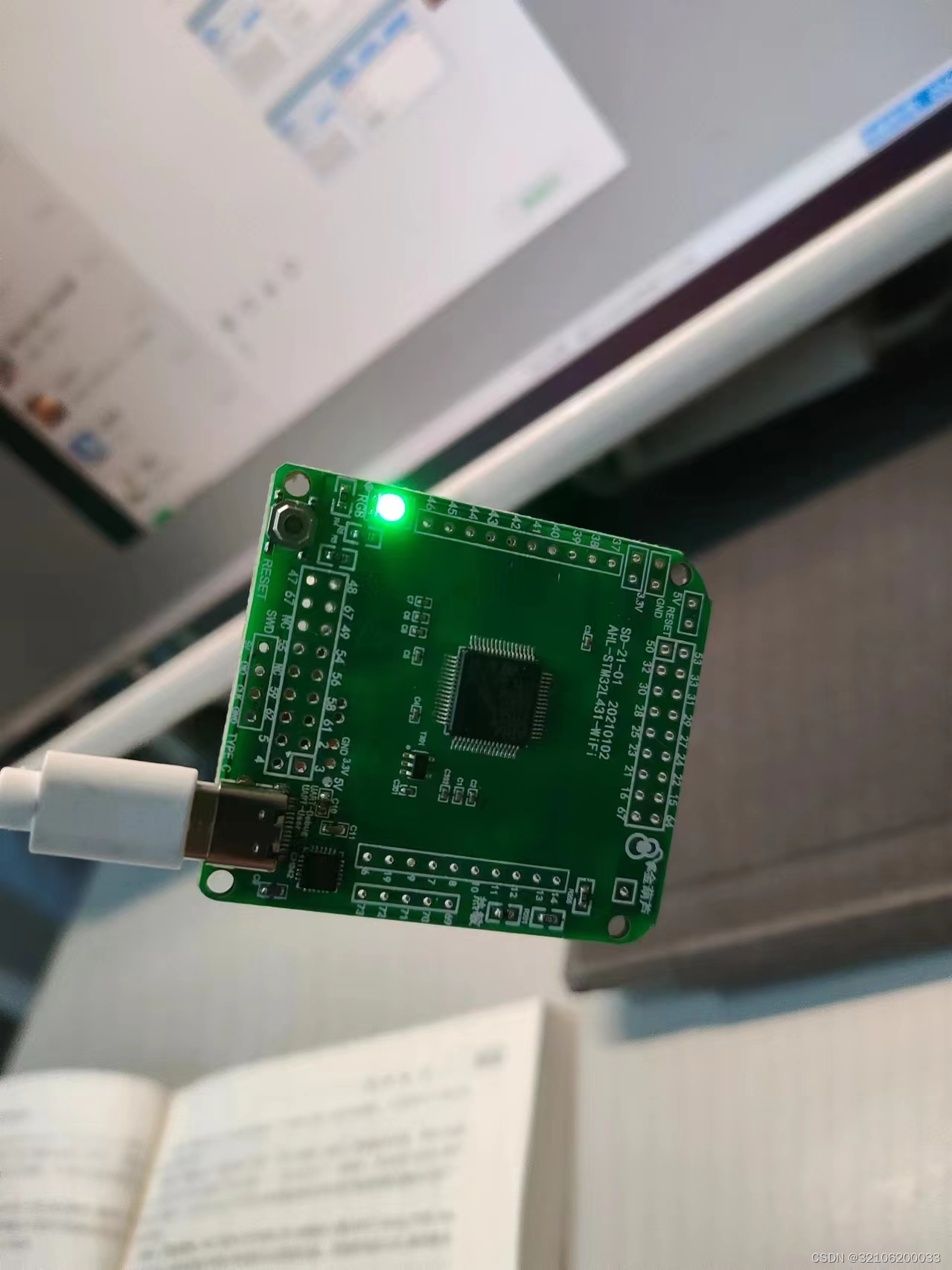
步骤一:硬件连线
步骤二:打开环境,导入工程
步骤三:编译工程
步骤四:连接GEC
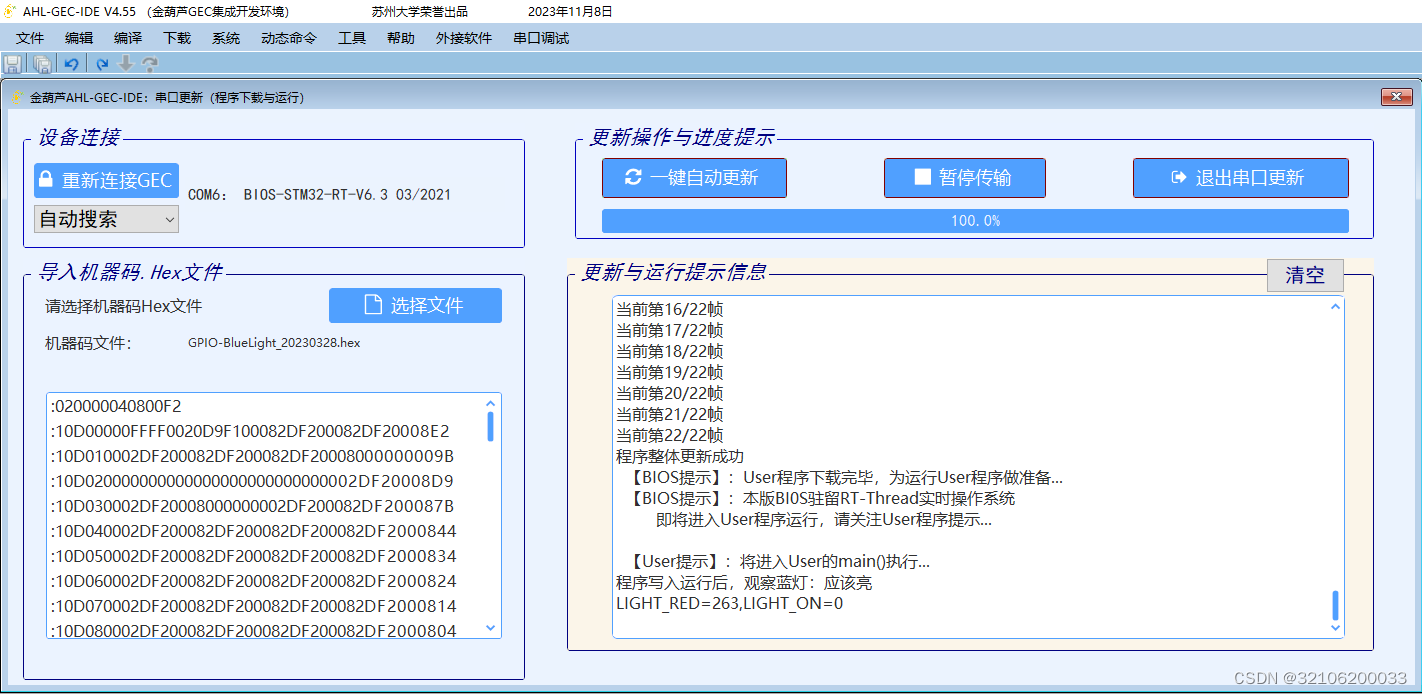
步骤五:下载机器码
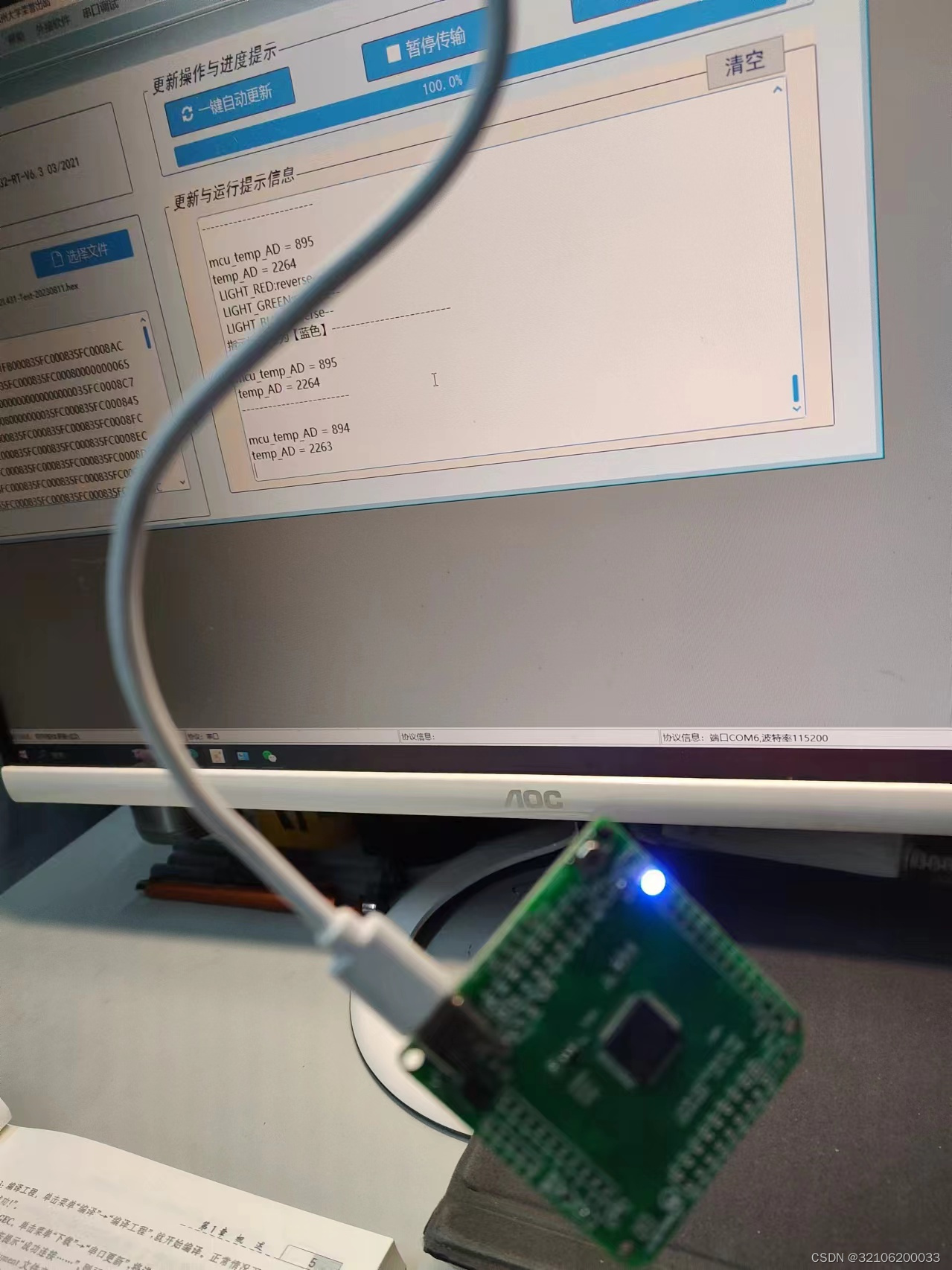
步骤六:观察运行结果



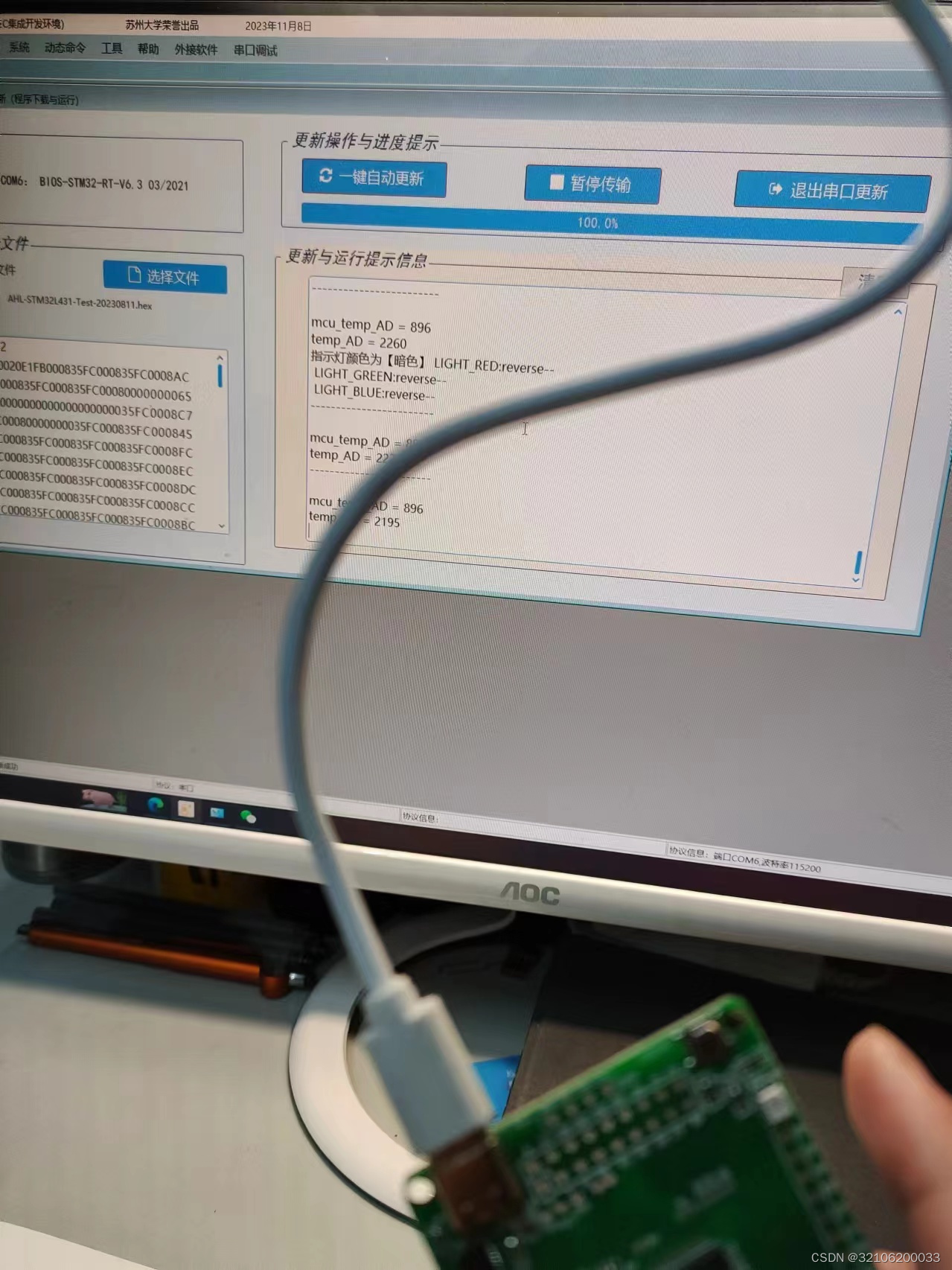

步骤七: 通过串口观察运行情况

第二章作业
描述:打开04-Software/ch02/CH02-1-20220118工程目录编译下载运行,理解并学习main.s汇编源文件。
写出main.s中94~101行语句的C语言描述
修改main.s源文件,增加以下内容:
1、在第一行显示“广州大学”字样。
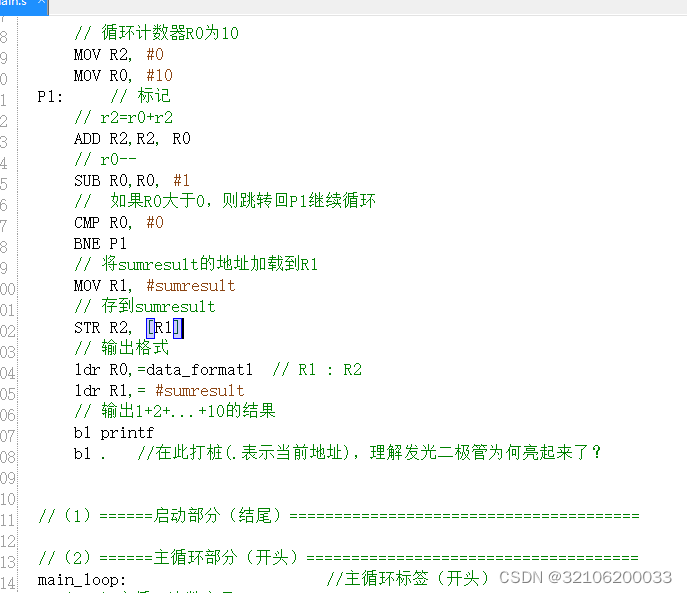
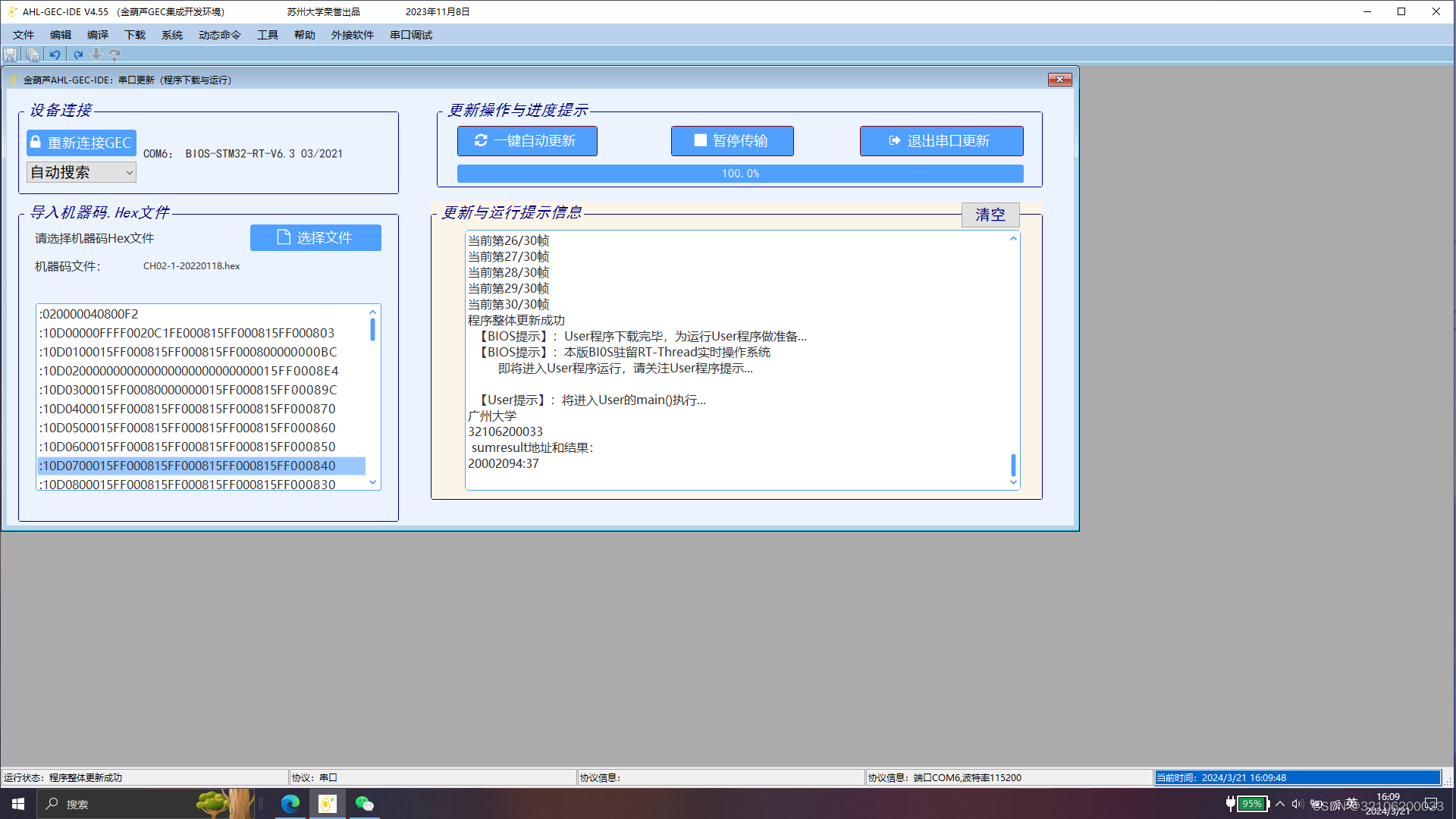
2、编写一个1+2+…+10的程序,将求和结果存入名为“sumresult”的内存单元中,并将求和结果用printf显示出来。
结论:经过测试和观察,data_format输出格式输出的是R1; 而data_format1输出格式输出的是R1 : R2,且R1适合放内存地址,R2放结果数据。
C语言描述main.s中main_loop里的语句
#include<iostream>
using namespace std;
int* mMainLoopCount = new int(1); //地址
const int MainLoopNUM = 10; // 常数(循环结束的阻止次数)
int main() {
int r2 = MainLoopNUM;
int r1 = *mMainLoopCount; // 取数
// 为达到主循环次数设定值,继续循环
for (int i = r1; r1 != r2; i++) {
r1=i;
*mMainLoopCount = r1;
}
// 达到主循环次数设定值
delete mMainLoopCount; // 释放空间
return 0;
}
代码
内存单元命名为sumresult
编写1-10的累加程序
完整代码:
//=====================================================================
//文件名称:main.s
//功能概要:汇编编程调用GPIO构件控制小灯闪烁(利用printf输出提示信息)
//版权所有:SD-ARM(sumcu.suda.edu.cn)
//版本更新:20180810-20191018
//=====================================================================
.include "include.inc" //头文件中主要定义了程序中需要使用到的一些常量
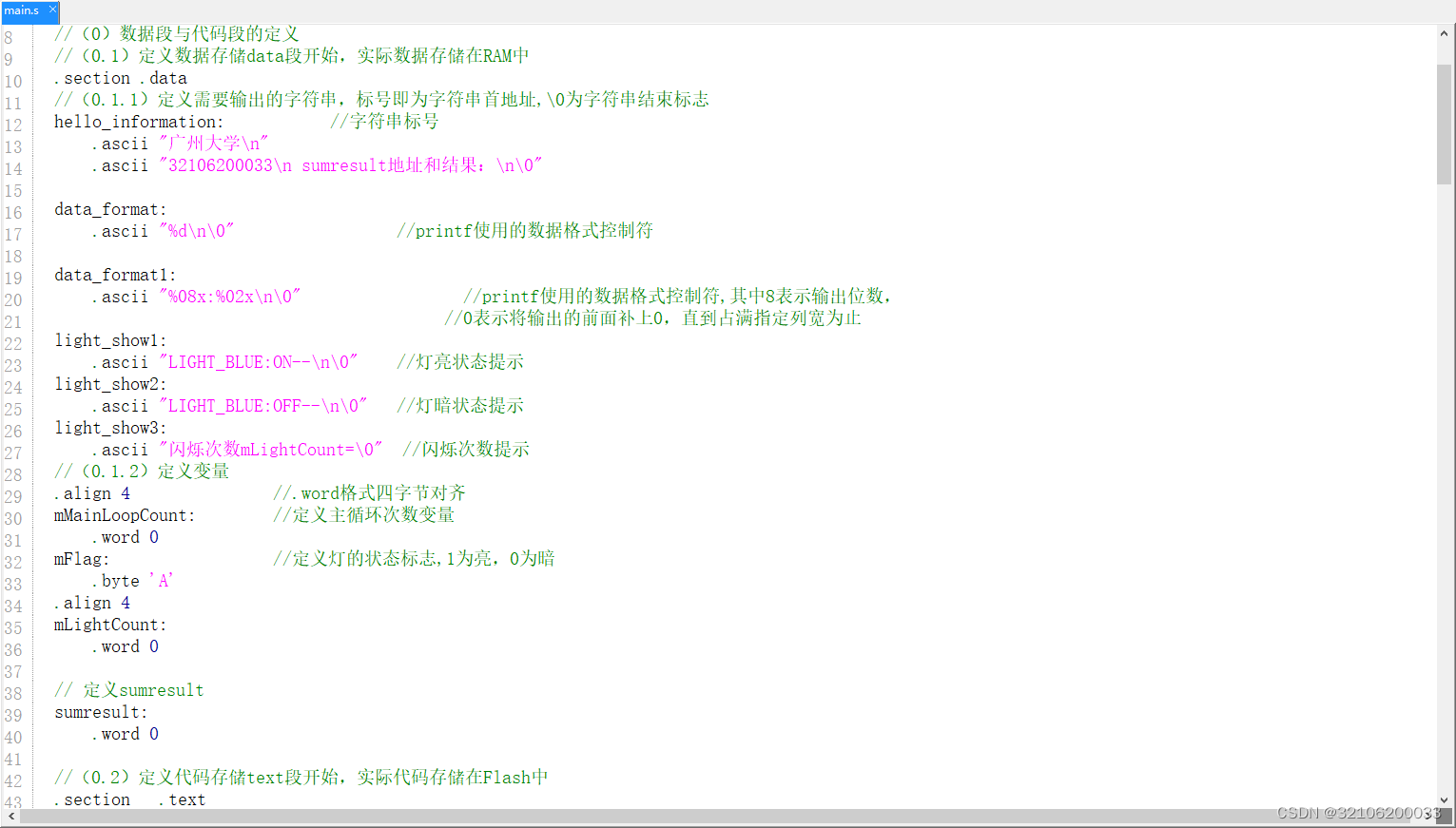
//(0)数据段与代码段的定义
//(0.1)定义数据存储data段开始,实际数据存储在RAM中
.section .data
//(0.1.1)定义需要输出的字符串,标号即为字符串首地址,\0为字符串结束标志
hello_information: //字符串标号
.ascii "广州大学\n"
.ascii "32106200033\n sumresult地址和结果:\n\0"
data_format:
.ascii "%d\n\0" //printf使用的数据格式控制符
data_format1:
.ascii "%08x:%02x\n\0" //printf使用的数据格式控制符,其中8表示输出位数,
//0表示将输出的前面补上0,直到占满指定列宽为止
light_show1:
.ascii "LIGHT_BLUE:ON--\n\0" //灯亮状态提示
light_show2:
.ascii "LIGHT_BLUE:OFF--\n\0" //灯暗状态提示
light_show3:
.ascii "闪烁次数mLightCount=\0" //闪烁次数提示
//(0.1.2)定义变量
.align 4 //.word格式四字节对齐
mMainLoopCount: //定义主循环次数变量
.word 0
mFlag: //定义灯的状态标志,1为亮,0为暗
.byte 'A'
.align 4
mLightCount:
.word 0
// 定义sumresult
sumresult:
.word 0
//(0.2)定义代码存储text段开始,实际代码存储在Flash中
.section .text
.syntax unified //指示下方指令为ARM和thumb通用格式
.thumb //Thumb指令集
.type main function //声明main为函数类型
.global main //将main定义成全局函数,便于芯片初始化之后调用
.align 2 //指令和数据采用2字节对齐,兼容Thumb指令集
//--------------------------------------------------------------------
//main.c使用的内部函数声明处
//--------------------------------------------------------------------
//主函数,一般情况下可以认为程序从此开始运行(实际上有启动过程,参见书稿)
main:
//(1)======启动部分(开头)主循环前的初始化工作======================
//(1.1)声明main函数使用的局部变量
//(1.2)【不变】关总中断
cpsid i
//(1.3)给主函数使用的局部变量赋初值
//(1.4)给全局变量赋初值
//(1.5)用户外设模块初始化
// 初始化蓝灯, r0、r1、r2是gpio_init的入口参数
ldr r0,=LIGHT_BLUE //r0指明端口和引脚(用=,因常量>=256,需用ldr)
mov r1,#GPIO_OUTPUT //r1指明引脚方向为输出
mov r2,#LIGHT_OFF //r2指明引脚的初始状态为亮
bl gpio_init //调用gpio初始化函数
// 初始化串口UART_User1
mov r0,#UART_User //串口号
ldr r1,=UART_BAUD //波特率
bl uart_init //调用uart初始化函数
//(1.6)使能模块中断
mov r0,#UART_User //串口号
bl uart_enable_re_int //调用uart中断使能函数
//(1.7)【不变】开总中断
cpsie i
//显示hello_information定义的字符串
ldr r0,=hello_information //待显示字符串首地址
bl printf //调用printf显示字符串
// 循环计数器R1为10
MOV R2, #0
MOV R0, #10
P1: // 标记
// r2=r0+r2
ADD R2,R2, R0
// r0--
SUB R0,R0, #1
// 如果R1大于0,则跳转回P1继续循环
CMP R0, #0
BNE P1
// 将sumresult的地址加载到R1
MOV R1, #sumresult
// 存到sumresult
STR R2, [R1]
// 输出格式
ldr R0,=data_format1 // R1 : R2
// MOV R1 ,#1
ldr R1,= #sumresult
// 输出1+2+...+10的结果
bl printf
bl . //在此打桩(.表示当前地址),理解发光二极管为何亮起来了?
//(1)======启动部分(结尾)=======================================
//(2)======主循环部分(开头)=====================================
main_loop: //主循环标签(开头)
//(2.1)主循环次数变量mMainLoopCount+1
ldr r2,=mMainLoopCount //r2←mMainLoopCount的地址
ldr r1, [r2]
add r1,#1
str r1,[r2]
//(2.2)未达到主循环次数设定值,继续循环
ldr r2,=MainLoopNUM
cmp r1,r2
blO main_loop //未达到,继续循环
//(2.3)达到主循环次数设定值,执行下列语句,进行灯的亮暗处理
//测试代码部分[理解机器码存储]
Label:
MOV R0,#0xDE //立即数范围为0x00~0xFF
ldr r0,=data_format1 //输出格式送r0
ldr r1,=Label //r1中是Label地址
ldrb r2,[r1] //r2中是Label地址中的数据
bl printf
ldr r0,=data_format1 //输出格式送r0
ldr r1,=Label+1 //r1中是Label+1地址
ldrb r2,[r1] //r2中是Label+1地址中的数据
bl printf
ldr r0,=data_format1 //输出格式送r0
ldr r1,=Label+2 //r1中是Label+2地址
ldrb r2,[r1] //r2中是Label+2地址中的数据
bl printf
ldr r0,=data_format1 //输出格式送r0
ldr r1,=Label+3 //r1中是Label+3地址
ldrb r2,[r1] //r2中是Label+3地址中的数据
bl printf
//(2.3.1)清除循环次数变量
ldr r2,=mMainLoopCount //r2←mMainLoopCount的地址
mov r1,#0
str r1,[r2]
//(2.3.2)如灯状态标志mFlag为'L',灯的闪烁次数+1并显示,改变灯状态及标志
//判断灯的状态标志
ldr r2,=mFlag
ldr r6,[r2]
cmp r6,#'L'
bne main_light_off //mFlag不等于'L'转
//mFlag等于'L'情况
ldr r3,=mLightCount //灯的闪烁次数mLightCount+1
ldr r1,[r3]
add r1,#1
str r1,[r3]
ldr r0,=light_show3 //显示“灯的闪烁次数mLightCount=”
bl printf
ldr r0,=data_format //显示灯的闪烁次数值
ldr r2,=mLightCount
ldr r1,[r2]
bl printf
ldr r2,=mFlag //灯的状态标志改为'A'
mov r7,#'A'
str r7,[r2]
ldr r0,=LIGHT_BLUE //亮灯
ldr r1,=LIGHT_ON
bl gpio_set
ldr r0, =light_show1 //显示灯亮提示
bl printf
//mFlag等于'L'情况处理完毕,转
b main_exit
//(2.3.3)如灯状态标志mFlag为'A',改变灯状态及标志
main_light_off:
ldr r2,=mFlag //灯的状态标志改为'L'
mov r7,#'L'
str r7,[r2]
ldr r0,=LIGHT_BLUE //暗灯
ldr r1,=LIGHT_OFF
bl gpio_set
ldr r0, =light_show2 //显示灯暗提示
bl printf
main_exit:
b main_loop //继续循环
//(2)======主循环部分(结尾)=====================================
.end //整个程序结束标志(结尾)
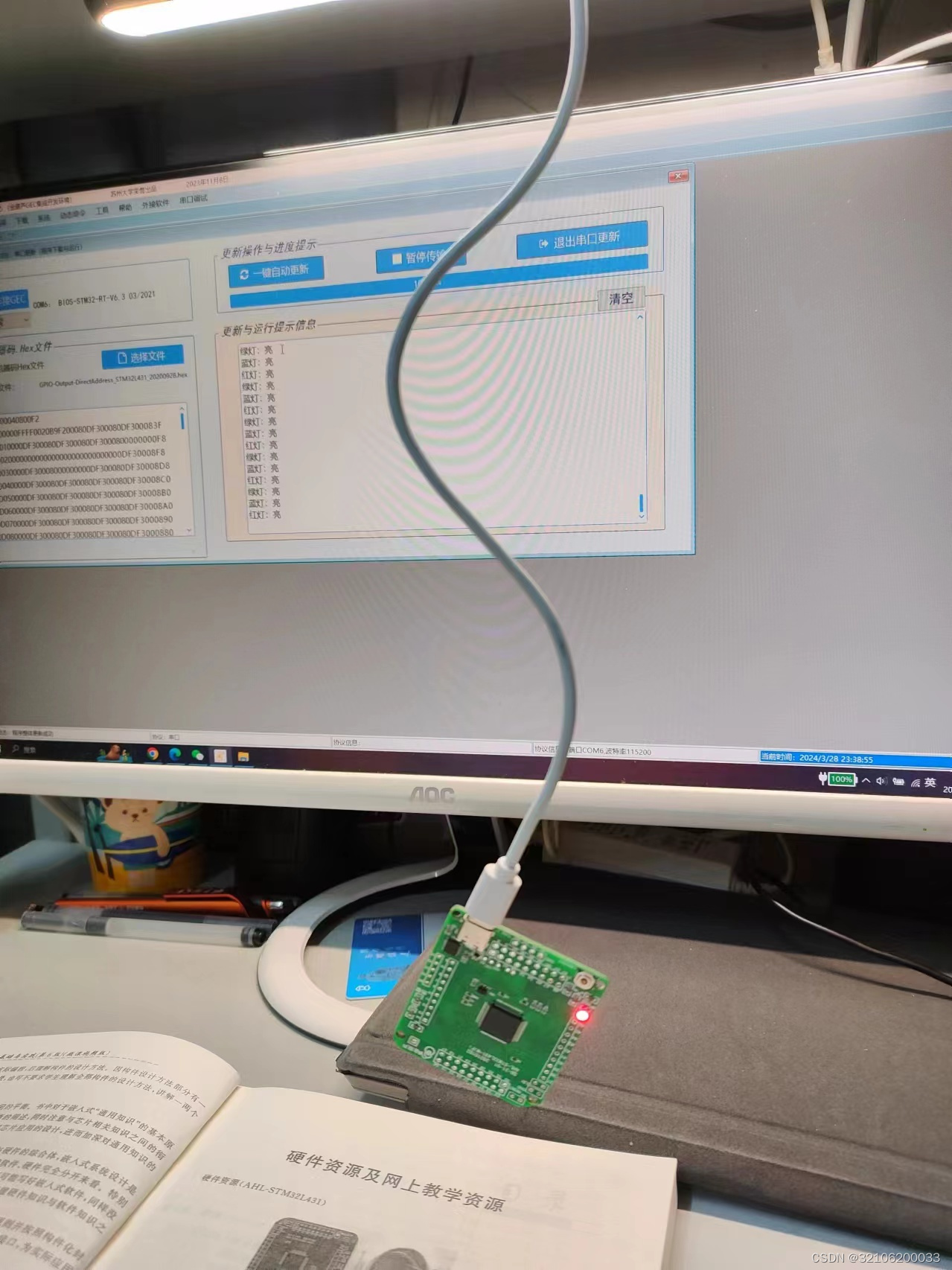
结果
第三章作业
给出所用MCU芯片型号标识所获得的信息。
(对照命名格式)
举例:型号标识:ATMEGA328P-AU
- 制造商代码(Manufacturer Code):
AT这通常是制造商的缩写。在这个例子中,AT可能代表Atmel(现为Microchip Technology的一部分),一家知名的微控制器和微处理器制造商。 - 系列或产品家族(Series/Family):
MEGA这表示MCU属于特定的产品系列或家族。对于Atmel来说,MEGA系列通常指的是基于AVR架构的高性能微控制器。 - 型号(Model):
328- 这个数字标识了MCU的具体型号。在这个例子中,它可能表示这是一款具有特定内存大小、处理能力或其他特性的微控制器。 - 封装类型(Package Type):
P这个字母表示MCU的封装类型。P可能代表某种特定的封装,如PDIP(Platinum Dual In-line Package)或其他封装形式。 - 版本或修订(Version/Revision):
-A这个后缀可能表示MCU的版本或修订级别。A可能意味着这是原始设计之后的某个改进版本,可能包括修正、性能提升或新特性的添加。 - 额外信息(Additional Information):在这个例子中,型号标识中没有提供额外的信息,但有时制造商会添加额外的字母或数字来指示温度范围、RoHS合规性、引脚数量等。
给出所用MCU芯片的RAM及Flash大小、地址范围。
ATMEGA328P-AU的MCU为例:
-
RAM(随机存取存储器)
- 大小:ATMEGA328P通常有2KB的RAM。这提供了足够的工作内存来存储变量和临时数据。
- 地址范围:RAM的地址范围通常是从0x0000到0x07FF。2KB的地址空间
-
Flash Memory(闪存)
- 大小:ATMEGA328P通常配备有32KB的闪存。这意味着它有足够的存储空间来存储程序代码和常量数据。
- 地址范围:闪存的地址范围通常是从0x0000到0x7FFF。这是32KB的地址空间,每个字节都有一个唯一的地址。
第四章作业
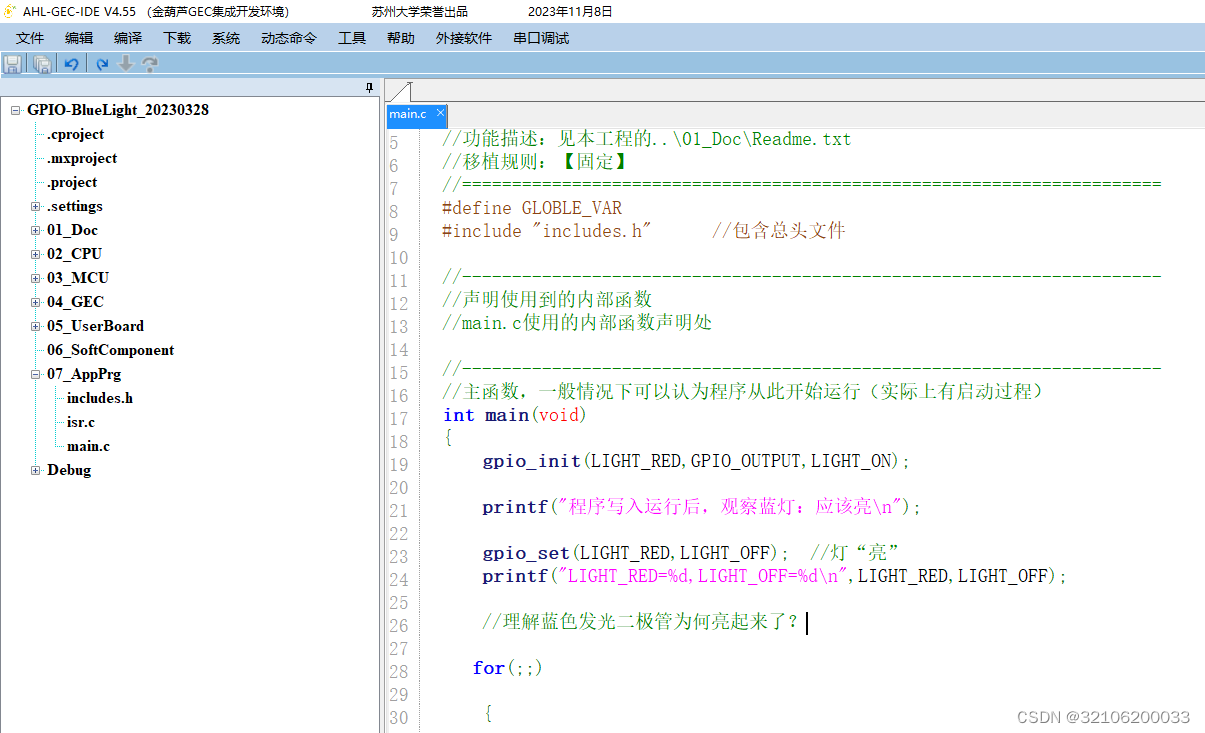
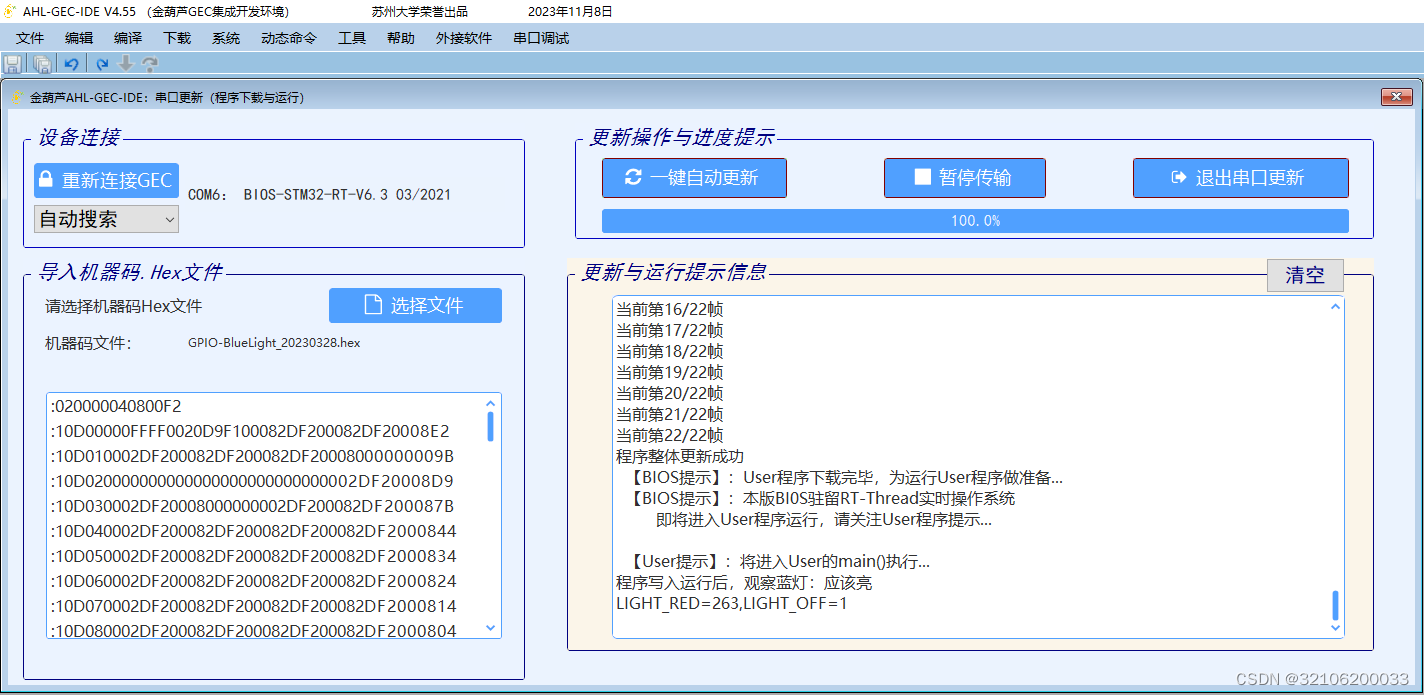
1.学习CH04示例程序,包括gpio.c和4个工程中的main.c. 2.给出 gpio_set(LIGHT_RED,LIGHT_OFF); 语句中,LIGHT RED和LIGHT OFF的值是多少?贴出每一步的查找截图。
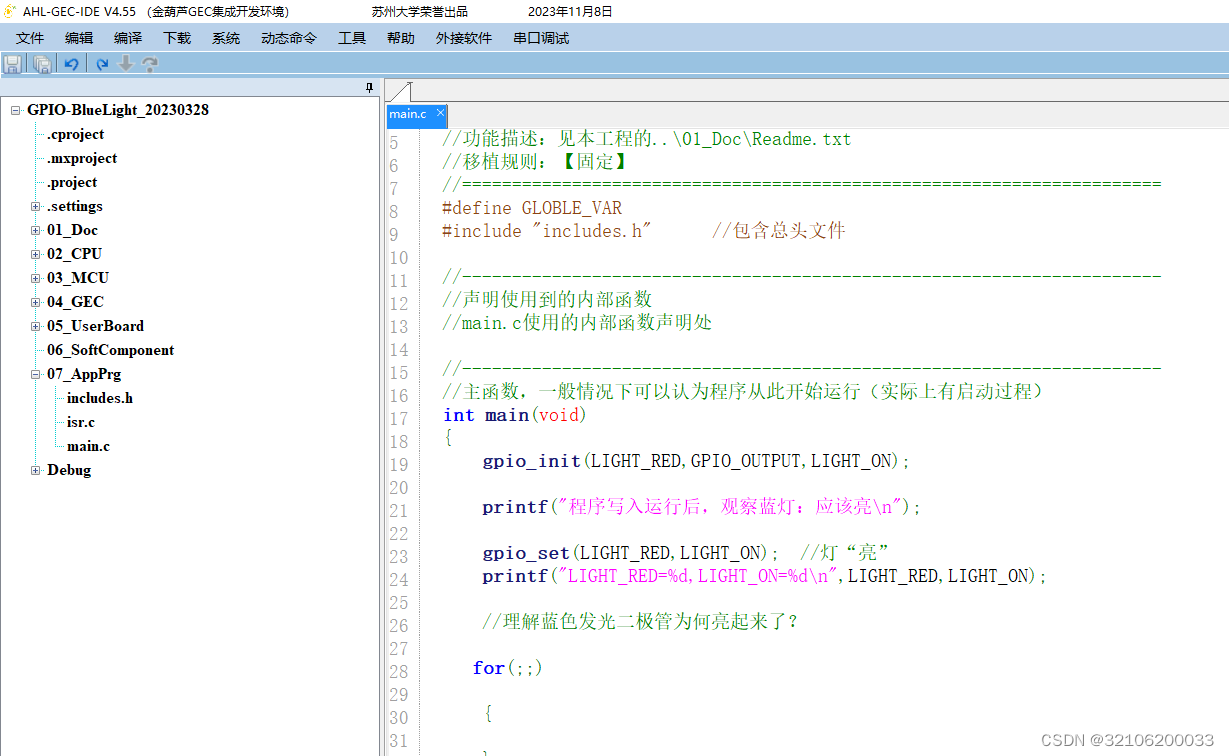
GPIO-BlueLight_20230328工程
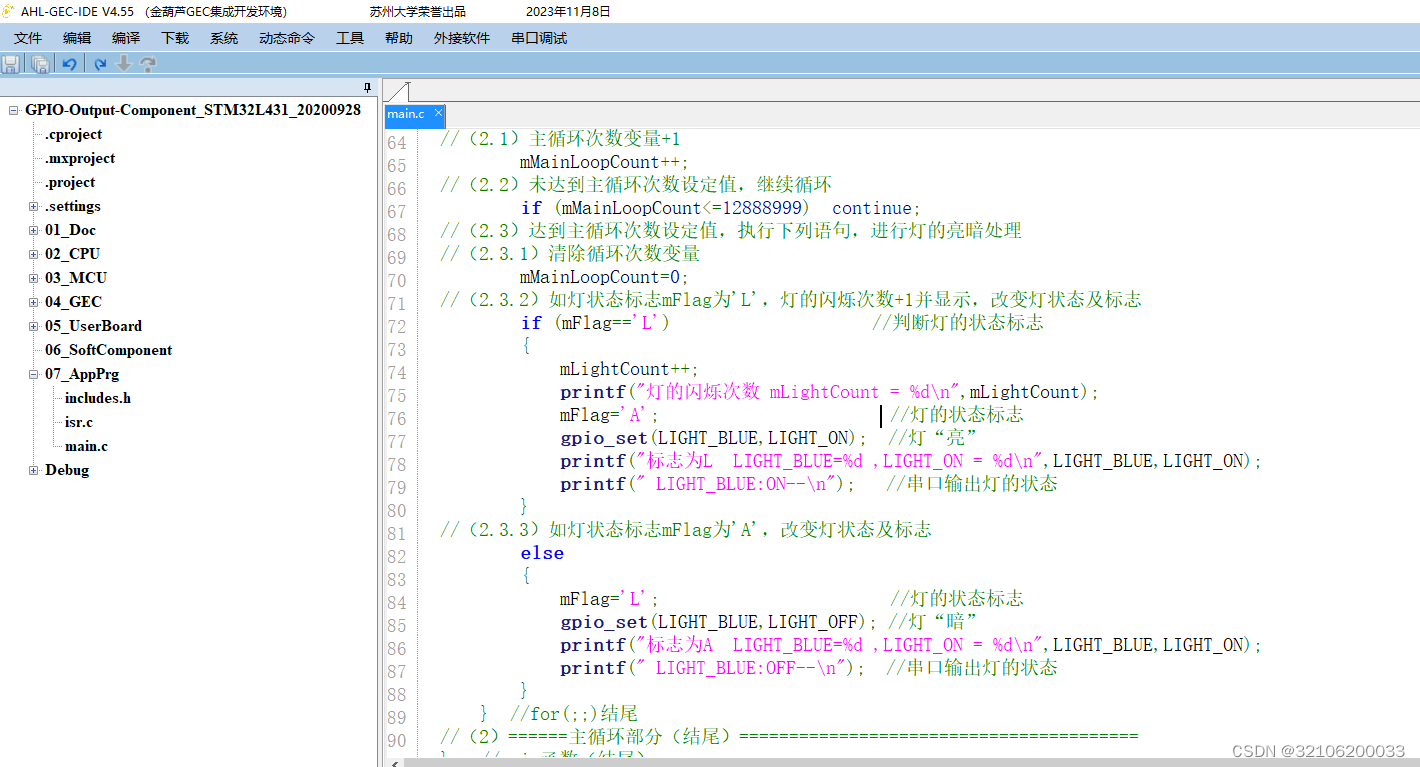
GPIO-Output-Component_STM32L431_20200928工程
3.用直接地址编程方式,实现红绿蓝三灯轮流闪烁
修改代码:
完整代码:
//====================================================================
//文件名称:main.c(应用工程主函数)
//框架提供:SD-Arm(sumcu.suda.edu.cn)
//版本更新:2017.08, 2020.05
//功能描述:见本工程的<01_Doc>文件夹下Readme.txt文件
//====================================================================
#define GLOBLE_VAR
#include "includes.h" //包含总头文件
//----------------------------------------------------------------------
//声明使用到的内部函数
//main.c使用的内部函数声明处
//----------------------------------------------------------------------
//主函数,一般情况下可以认为程序从此开始运行(实际上有启动过程见书稿)
int main(void)
{
//(1)======启动部分(开头)==========================================
//(1.1)声明main函数使用的局部变量
uint32_t mMainLoopCount; //主循环使用的记录主循环次数变量
uint8_t mFlag; //主循环使用的临时变量
//(1.2)【不变】关总中断
DISABLE_INTERRUPTS;
//(1.3)给主函数使用的局部变量赋初值
mMainLoopCount = 0; //主循环使用的记录主循环次数变量
mFlag='B'; //主循环使用的临时变量:蓝灯状态标志
//(1.4)给全局变量赋初值
//(1.5)用户外设模块初始化
// B口9脚(蓝灯,低电平点亮)
//(1.5.1)声明变量
volatile uint32_t* RCC_AHB2; //GPIO的B口时钟使能寄存器地址
volatile uint32_t* gpio_ptr; //GPIO的B口基地址
volatile uint32_t* gpio_mode; //引脚模式寄存器地址=口基地址
volatile uint32_t* gpio_bsrr; //置位/复位寄存器地址
volatile uint32_t* gpio_brr; //GPIO位复位寄存器
//(1.5.2)变量赋值
RCC_AHB2=(uint32_t*)0x4002104C; //GPIO的B口时钟使能寄存器地址
gpio_ptr=(uint32_t*)0x48000400; //GPIO的B口基地址
gpio_mode=gpio_ptr; //引脚模式寄存器地址=口基地址
gpio_bsrr=gpio_ptr+6; //置位/复位寄存器地址
gpio_brr=gpio_ptr+10; //GPIO位复位寄存器
//(1.5.3)GPIO初始化
//(1.5.3.1)使能相应GPIOB的时钟
*RCC_AHB2|=(1<<1); //GPIOB的B口时钟使能
//(1.5.3.1)定义B口9脚为输出引脚(令D19、D18=01)方法如下:
*gpio_mode &= ~(3<<18); //0b11111111111100111111111111111111;
*gpio_mode |=(1<<18); //0b00000000000001000000000000000000;
//(思考:为什么这样赋值?答案见本文件末尾注①)
//(1.6)使能模块中断
//(1.7)【不变】开总中断
ENABLE_INTERRUPTS;
printf("-----------------------------------------------------\r\n");
printf("金葫芦提示:直接地址方式进行GPIO输出\r\n");
printf(" 这个编程有点难以看懂,使用构件编程就简单多了,\r\n");
printf(" 但是构件制作要经过这一关,因此,我们把构件制作与\r\n");
printf(" 基于构件的编程分成不同过程。学习嵌入式系统,\r\n");
printf(" 以理解GPIO、UART、定时器、Flash、ADC、...\r\n");
printf(" 知识要素为出发点,学会正确运用构件进行应用编程,\r\n");
printf(" 理解和掌握2~3个简单构件的制作方法即可。\r\n");
printf("----------------------------------------------------\r\n");
//for(;;) { } //在此打桩,理解蓝色发光二极管为何亮起来了?
//(1)======启动部分(结尾)==========================================
//(2)======主循环部分(开头)=========================================
// gpio_init(LIGHT_RED,GPIO_OUTPUT,LIGHT_ON);
*gpio_bsrr|=(1<<7); //设置灯“暗”
*gpio_bsrr|=(1<<8); //设置灯“暗”
*gpio_bsrr|=(1<<9); //设置灯“暗”
for(;;) //for(;;)(开头)
{
//(2.1)主循环次数+1,并判断是否小于特定常数
mMainLoopCount++; //+1
if (mMainLoopCount<=6556677) continue; //如果小于特定常数,继续循环
//(2.2)主循环次数超过特定常数,灯状态进行切换(这样灯会闪烁)
mMainLoopCount=0; //清主循环次数
//切换灯状态
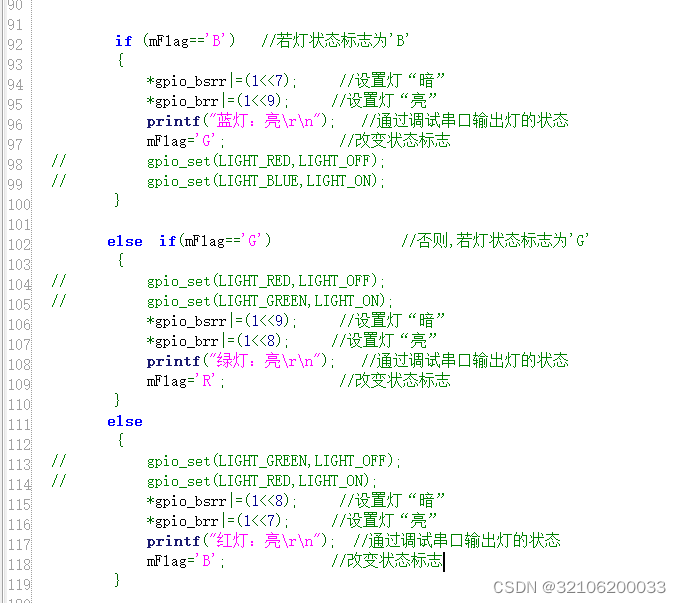
if (mFlag=='B') //若灯状态标志为'B'
{
*gpio_bsrr|=(1<<7); //设置灯“暗”
*gpio_brr|=(1<<9); //设置灯“亮”
printf("蓝灯:亮\r\n"); //通过调试串口输出灯的状态
mFlag='G'; //改变状态标志
// gpio_set(LIGHT_RED,LIGHT_OFF);
// gpio_set(LIGHT_BLUE,LIGHT_ON);
}
else if(mFlag=='G') //否则,若灯状态标志为'G'
{
// gpio_set(LIGHT_RED,LIGHT_OFF);
// gpio_set(LIGHT_GREEN,LIGHT_ON);
*gpio_bsrr|=(1<<9); //设置灯“暗”
*gpio_brr|=(1<<8); //设置灯“亮”
printf("绿灯:亮\r\n"); //通过调试串口输出灯的状态
mFlag='R'; //改变状态标志
}
else
{
// gpio_set(LIGHT_GREEN,LIGHT_OFF);
// gpio_set(LIGHT_RED,LIGHT_ON);
*gpio_bsrr|=(1<<8); //设置灯“暗”
*gpio_brr|=(1<<7); //设置灯“亮”
printf("红灯:亮\r\n"); //通过调试串口输出灯的状态
mFlag='B'; //改变状态标志
}
} //for(;;)结尾
//(2)======主循环部分(结尾)========================================
}
/*
注① 这样做的目的在于更改了D19、D18两位的值,而不改变其他位的值,不这样的话,
可能把不需要改变的位也改变了!
*/
//======以下为主函数调用的子函数存放处=====================================
//======以下为主函数调用的子函数===========================================
//========================================================================
/*
知识要素:
(1)main.c是一个模板,该文件所有代码均不涉及具体的硬件和环境,通过调用构件
实现对硬件的干预。
(2)本文件中对宏GLOBLE_VAR进行了定义,所以在包含"includes.h"头文件时,会定
义全局变量,在其他文件中包含"includes.h"头文件时,
编译时会自动增加extern
*/
结果

既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!
由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新
需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)
==============================================================
/*
知识要素:
(1)main.c是一个模板,该文件所有代码均不涉及具体的硬件和环境,通过调用构件
实现对硬件的干预。
(2)本文件中对宏GLOBLE_VAR进行了定义,所以在包含"includes.h"头文件时,会定
义全局变量,在其他文件中包含"includes.h"头文件时,
编译时会自动增加extern
*/
结果

[外链图片转存中...(img-QBa34sGr-1715803485238)]
[外链图片转存中...(img-Xq7y7fRS-1715803485238)]
**既有适合小白学习的零基础资料,也有适合3年以上经验的小伙伴深入学习提升的进阶课程,涵盖了95%以上物联网嵌入式知识点,真正体系化!**
**由于文件比较多,这里只是将部分目录截图出来,全套包含大厂面经、学习笔记、源码讲义、实战项目、大纲路线、电子书籍、讲解视频,并且后续会持续更新**
**需要这些体系化资料的朋友,可以加我V获取:vip1024c (备注嵌入式)**
**[如果你需要这些资料,可以戳这里获取](https://bbs.csdn.net/topics/618679757)**















 620
620











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









