







信号与系统考研必备:Z变换基本性质与初值定理深度解析
在信号与系统的考研征途中,Z变换及其基本性质是我们无法绕过的知识点。而其中的初值定理,更是解题时的一把利器。今天,我们就来一起深入探讨Z变换的基本性质,并重点解析初值定理,为你的考研复习增添一份助力!
🔍 Z变换基本性质概览
Z变换,作为离散时间信号分析的重要工具,其基本性质众多且应用广泛。这些性质包括但不限于线性性质、时移性质、频移性质、尺度变换性质以及我们今天要重点讨论的初值定理。掌握这些性质,对于理解和分析离散时间信号具有重要意义。
🌟 初值定理详解
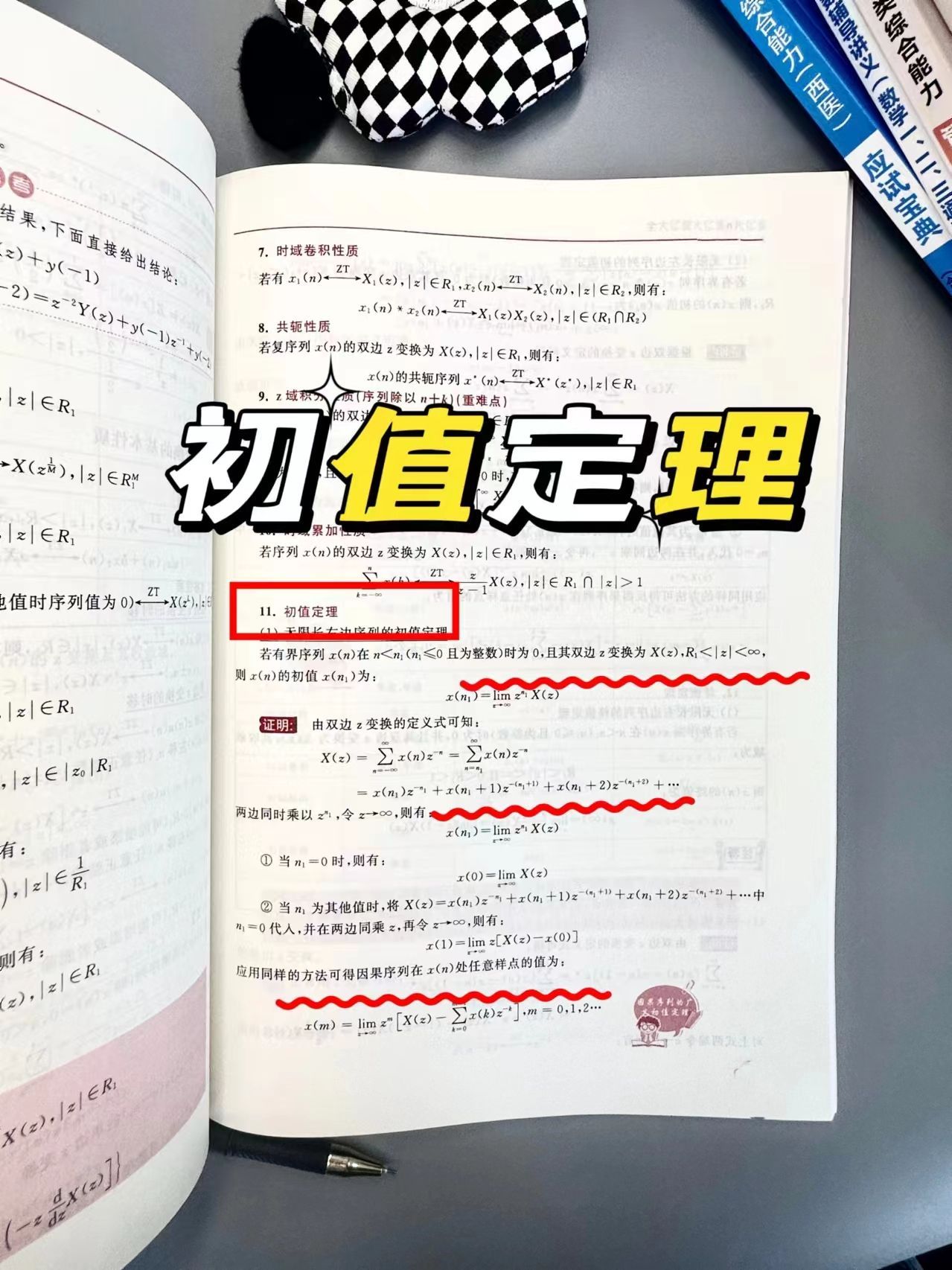
📚 定义与公式
初值定理是Z变换中的一个重要定理,它给出了在特定条件下,离散时间信号的初始值与其Z变换在z=1处的极限值之间的关系。具体地,若离散时间信号x[n]满足一定条件(如绝对可和或因果等),则其初值x[0]可由Z变换X(z)在z=1处的极限求得,即:
x[0]=z→1lim(z−1)X(z)注意,这里的条件“z=1处的极限存在”是关键,它要求X(z)在z=1附近是解析的,且没有极点或零点恰好位于z=1。
🌈 理解与应用
初值定理的实质是通过Z变换在复平面上的一个特定点(z=1)来求解信号的初始值。这种方法的优点在于,它避免了直接对信号进行复杂的时域分析,而是利用Z变换的频域特性来间接求解。因此,在处理一些复杂的离散时间信号时,初值定理显得尤为有用。
🌰 实例解析
假设我们有一个简单的离散时间信号x[n]=anu[n](其中∣a∣<1,u[n]为单位阶跃函数),其Z变换为X(z)=1−az−11。现在,我们想要利用初值定理来求解信号的初始值x[0]。
首先,我们注意到信号是因果的,且∣a∣<1保证了Z变换在z=1处是收敛的。然后,我们计算(z−1)X(z)在z=1处的极限:
#考研[话题]# #考研信号与系统[话题]# #考研良哥[话题]# #考研信号与系统网课[话题]# #2025考研[话题]# #复习大全[话题]# #研究生初试[话题]# #北京邮电大学考研[话题]#

















 723
723

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









