




实验目标:
完成OriginBOT人体跟踪
实验过程:
1.在电脑端配置好Ubuntu系统安装与ROS2系统安装,并下载好编译的PC端功能包,尝试一次快速上手的教程。
首先将串口模块连接到PC端的USB口,启动串口软件,连接串口设备、设置波特率921600、关闭流控制,并启动机器人电源;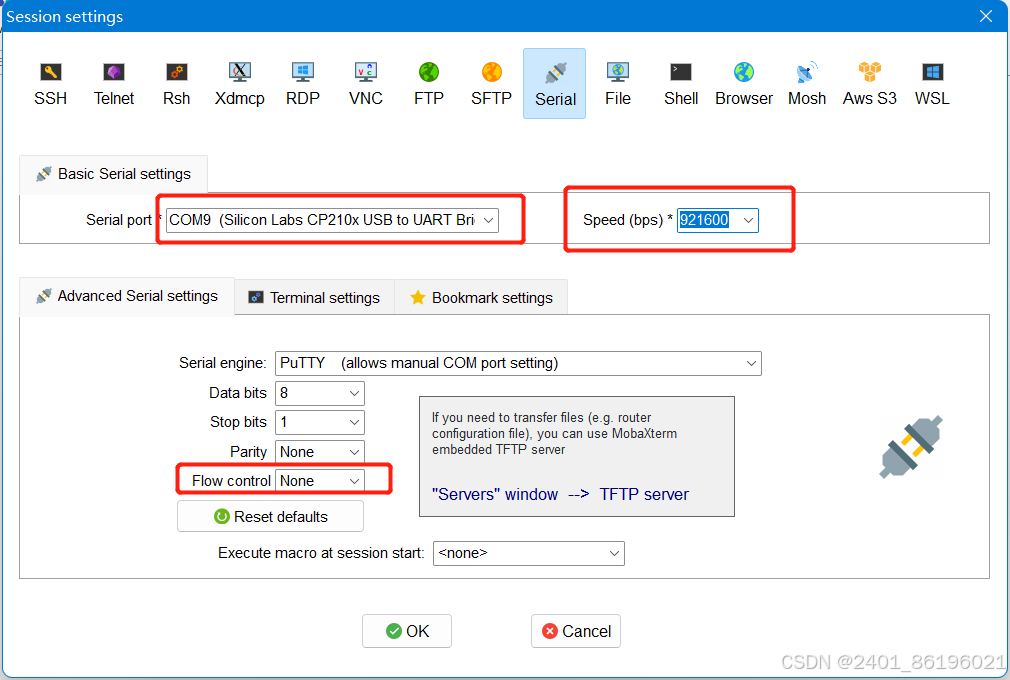
2.在串口软件中可以看到启动过程输出的日志信息,稍等片刻,会出现登录提示: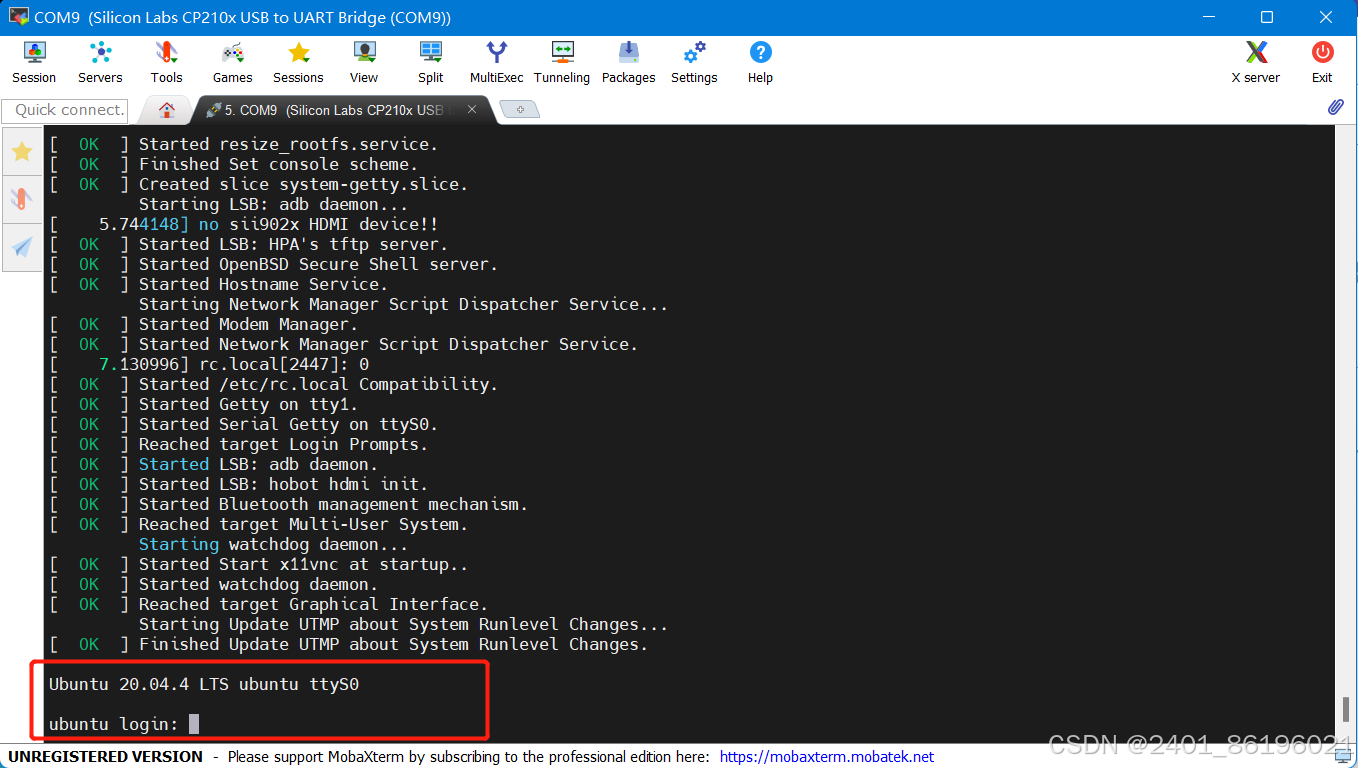
3.输入用户名及密码,用户名和密码均为root,然后配置无线网络,参考以下链接,完成无线网络的配置:
完成OriginBOT人体跟踪
1.在电脑端配置好Ubuntu系统安装与ROS2系统安装,并下载好编译的PC端功能包,尝试一次快速上手的教程。
首先将串口模块连接到PC端的USB口,启动串口软件,连接串口设备、设置波特率921600、关闭流控制,并启动机器人电源;
2.在串口软件中可以看到启动过程输出的日志信息,稍等片刻,会出现登录提示:
3.输入用户名及密码,用户名和密码均为root,然后配置无线网络,参考以下链接,完成无线网络的配置:

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章























