







知识点【通信的分类】
1、通信分类
(1)串行/并行
-
串行
工作方式:
在串行通信中,数据位按照顺序依次传输,也就是说,每一位数据都依次发送或者接收。
优点:
相对简单,不容易出现数据冲突。由于只有一个通信通道,线路的布线较为简单。
缺点:
速度相对较慢,因为每次只能传输一位数据。不适合大量数据的快速传输。
典型应用:
USB,UART,光纤通信
-
并行
工作方式:
在并行通信中,多个数据位同时传输。每个位都有自己的通道,可以独立传输,从而在同一时刻传输多个位。
优点:
速度相对较快,尤其适合大量数据的快速传输。适用于需要同时处理多个数据位的情况。
缺点:
复杂度较高,占用引脚资源多。容易出现数据同步问题
典型应用:
适用于短距离传输,长距离传输成本高
(2)同步/异步
-
同步
工作方式:
在同步通信中,数据的发送和接收都是在预定的时钟信号下进行的。数据的发送方和接收方需要共享相同的时钟源,以确保数据的同步。
优点:
数据传输的时序清晰,易于管理和理解。适用于需要实时性和精准同步的应用。
缺点:
高频时钟衰弱较快,通信过程易发生信号畸变,相位偏移,因此传输距离不宜过长。
典型应用:
I2C,HDMI,CPU和内存接口等
-
异步
工作方式:
在异步通信中,数据段发送和接受不依赖于共享时钟信号。每个数据块之间有一定的间隔,从而不需要严格的时序同步。通信设备会使用起始位和停止位来标识数据块的开始和结束。
优点:
较为灵活,不需要精准度的时钟同步。传输媒介简单,传输距离长。
缺点:
在高速传输和长距离通信时,由于没有同步的时钟,可能会出现数据失真。接收端解码复杂性增加,可靠性较差。
典型应用:
UART,USB1.1,USB2.0,光纤通信
(3)单工/半双工/全双工
-
单工
工作方式:
单工通信是一种单向通信模式,数据只能在一个方向上传输。通常,一个设备是发送者,而另一个设备是接收者。
特点:
通信双方只能在一个特定的方向上传输信息,其中一个设备全能发送,而另一个只能接收。
典型应用:
无线电广播,电视广播等
-
半双工
工作方式:
半双工通信是一种双向通信方式,但是通信双方不能同时进行数据传输。在任意时刻,一个设备可以发送,而另一个设备可以接受,但不能同时进行。
特点:
数据传输时双向的,但是不能同时发送,需要在发送和接受之间切换。
典型应用:
对讲机,传统的无线电通信等。
-
全双工
工作方式:
全双工通信是一种双向通信模式,其中通信的双方能够同时进行发送和接收操作,允许双方同时传输数据。
特点:
双方可以在同一时间内同时发送和接收数据,实现真正的双向通信
典型应用:
电话通话,互联网语音通话,典型的计算机网络通信等。
以上部分源自
原文链接:https://blog.csdn.net/m0_58427556/article/details/135302591
2、UART/USART介绍
(1)定义
UART( Universal Asynchronous Receiver-Transmitter)是一种采用 全双工异步串行通信方式的 通用异步收发传输器。
它在发送数据时将并行数据转换为串行数据来传输,在接收数据时将收到的串行数据转换为并行数据。
(2)波特率
波特率是指每秒传输的位数,是通信双方事先约定好的。
通信双方必须使用相同的波特率才能正常通信, 单位:bps(位/秒)。常用的波特率有9600,19200,38400等。
(3)数据帧
数据帧的格式包括起始位,数据位,奇偶校验位(可选),停止位 的组合
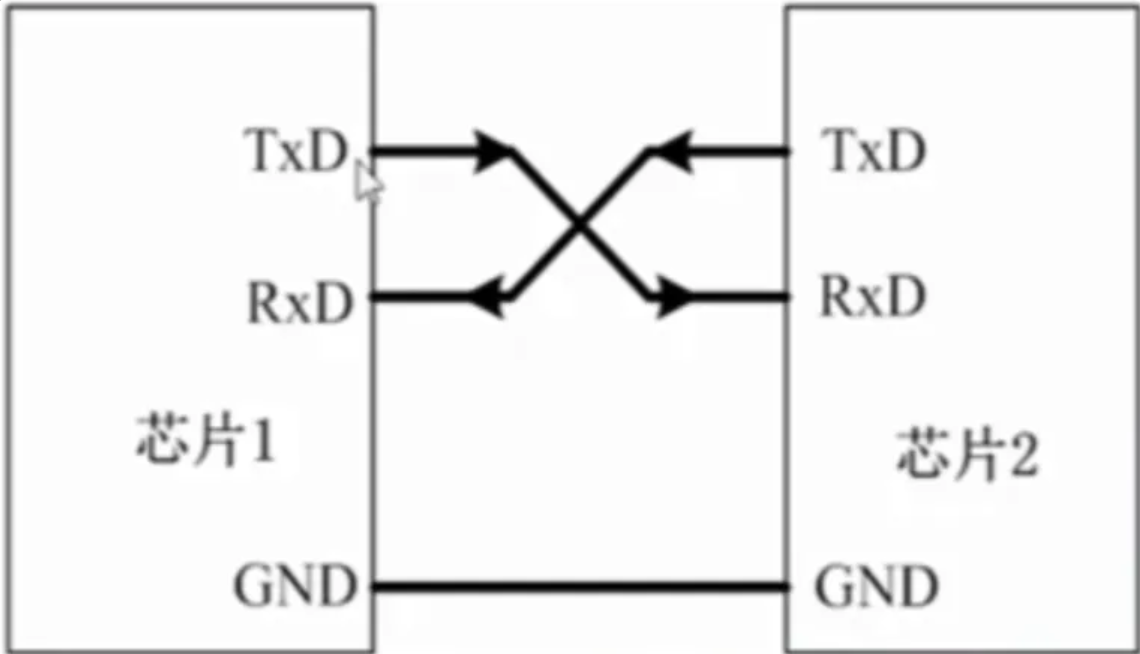
3、物理层分析
USRT至少需要两条数据线,发送线:TX,接受线:RX。TX用于发送数据,RX用于接收数据
4、CH340 (USB信号转串口)
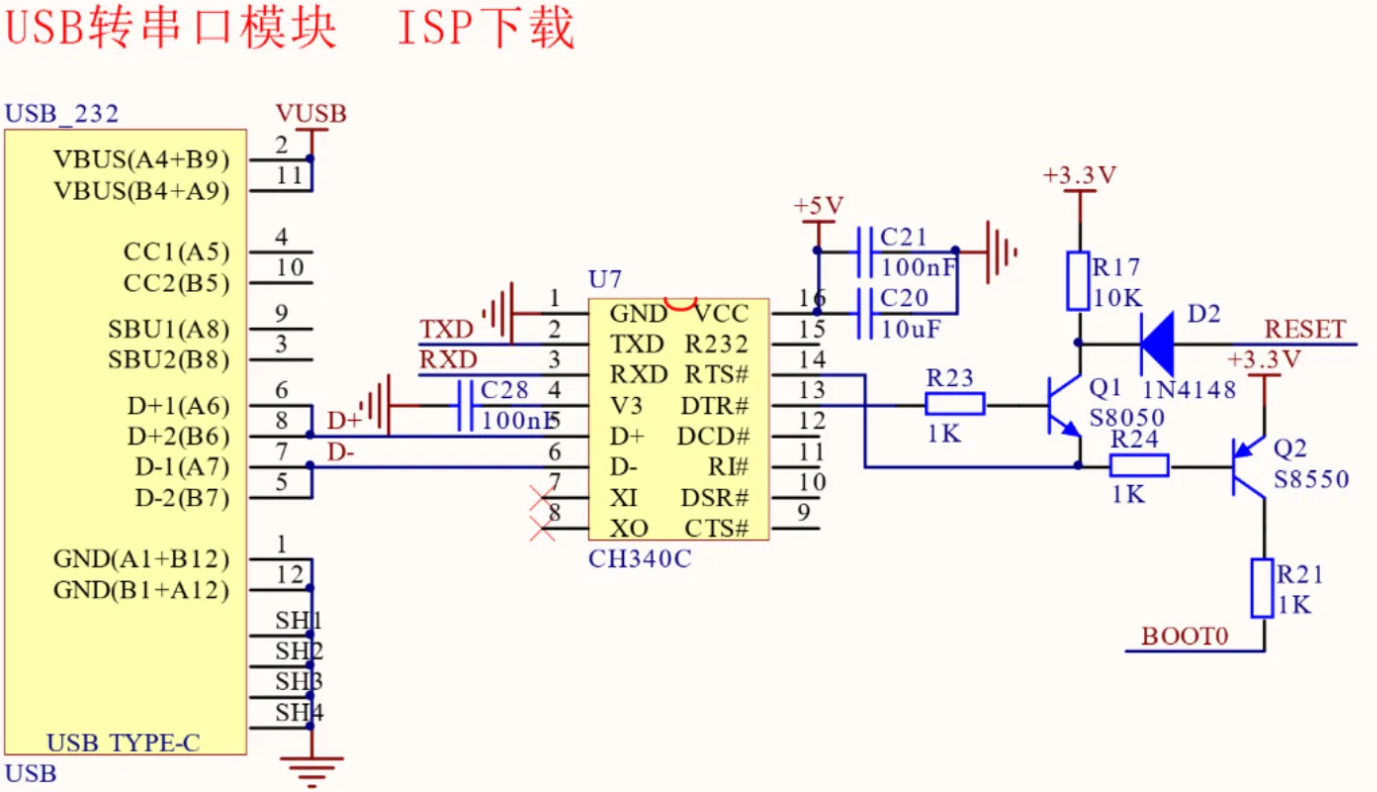
CH340是USB 转串口芯片
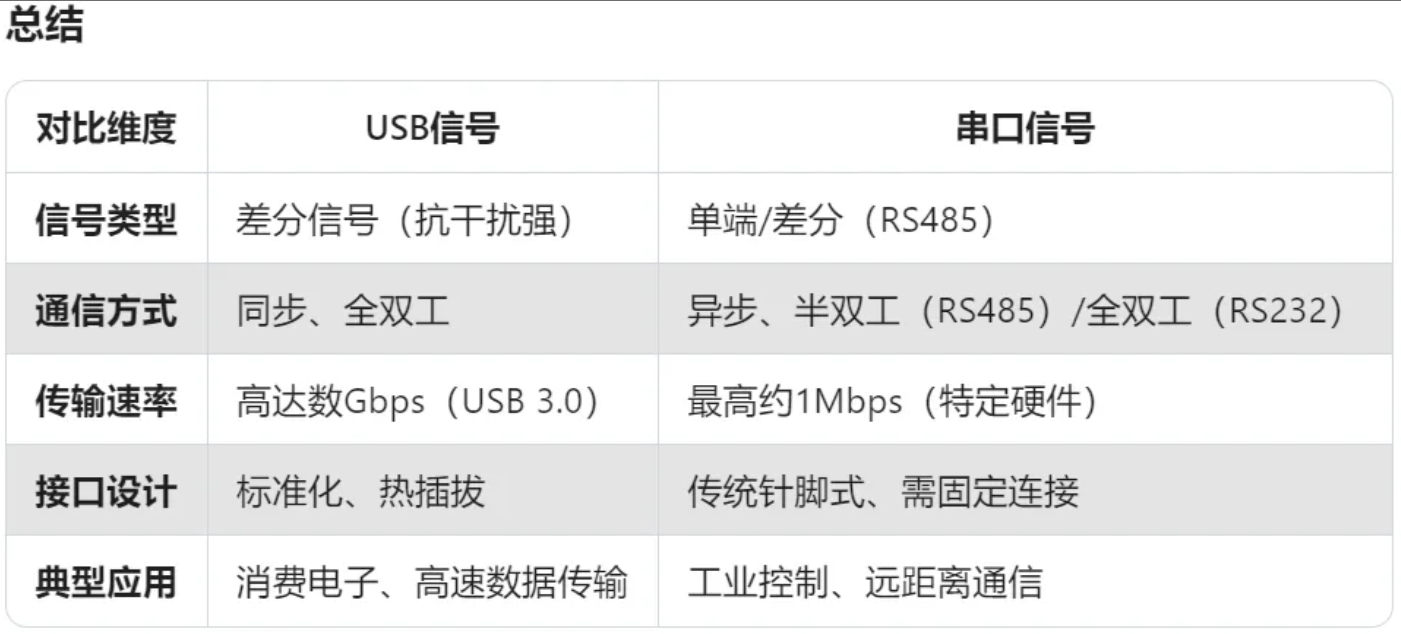
5、USB与串口信号的区别
1、USB信号
差分信号传输:USB使用D+和D-两条差分线传输数据,通过电压差表示逻辑“0”和“1”,抗干扰能力强,适合高速传输。
同步传输:支持全双工模式,且内置时钟同步机制,无需外部时钟信号。
支持热拔插
通过USB集线器(Hub)可扩展连接多个设备,动态分配带宽
2、串口信号
单端信号传输:传统串口(RS232)采用单线电压变化(如+3V~+15V表示逻辑“0”,-3V~-15V表示逻辑“1”)传输数据,抗干扰能力较弱
异步通信:依赖发送端和接收端约定的波特率,无统一时钟信号,数据帧以起始位、数据位、校验位和停止位组成
不支持热拔插
原生串口通常仅支持点对点通信,扩展需通过串口扩展卡
3、使用场景
USB信号:高速传输,短距离传输
串口信号:低速传输,远距离支持
RS485,采用差分信号,传输距离可达1200米(无中继)
知识点1【USART寄存器介绍】
这里我只介绍 我们实现串口通信用到的寄存器
1、状态寄存器
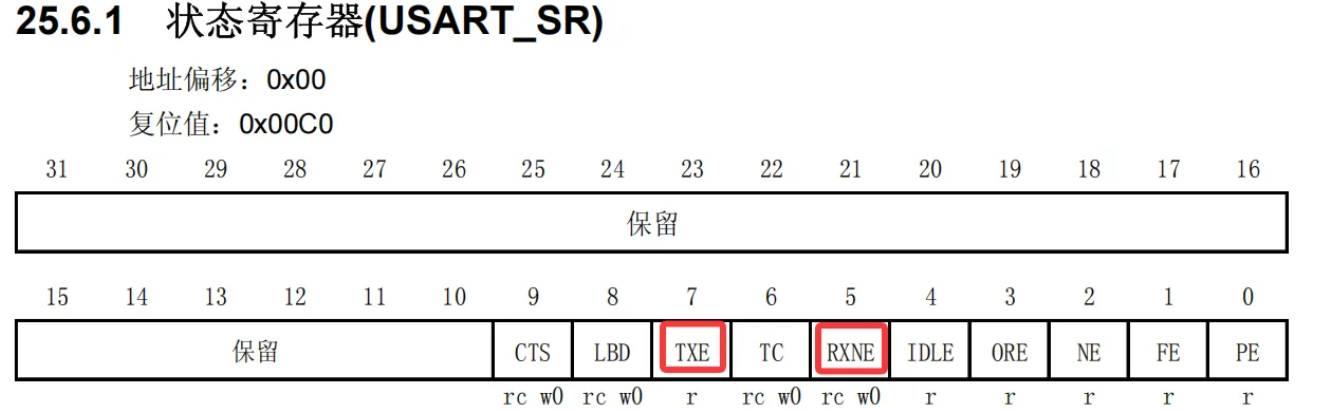
位7:TXE发送数据寄存器空
当检测到 发送数据寄存器为空 即 数据转送到移位寄存器的时候,移位寄存器发送数据,并将TXE置1。如果TXEIE为1,会产生中断,中断向TDR中写入数据,并将TXE置0。
位5:RXNE读数据寄存器非空
当检测到 接收数据寄存器非空 即从移位寄存器中读取数据的时候,移位寄存器会接收数据的同时,硬件将RXNE置1。如果TXEIE为1,会产生中断。中断从TDR中读数据,并将RXNE置0。
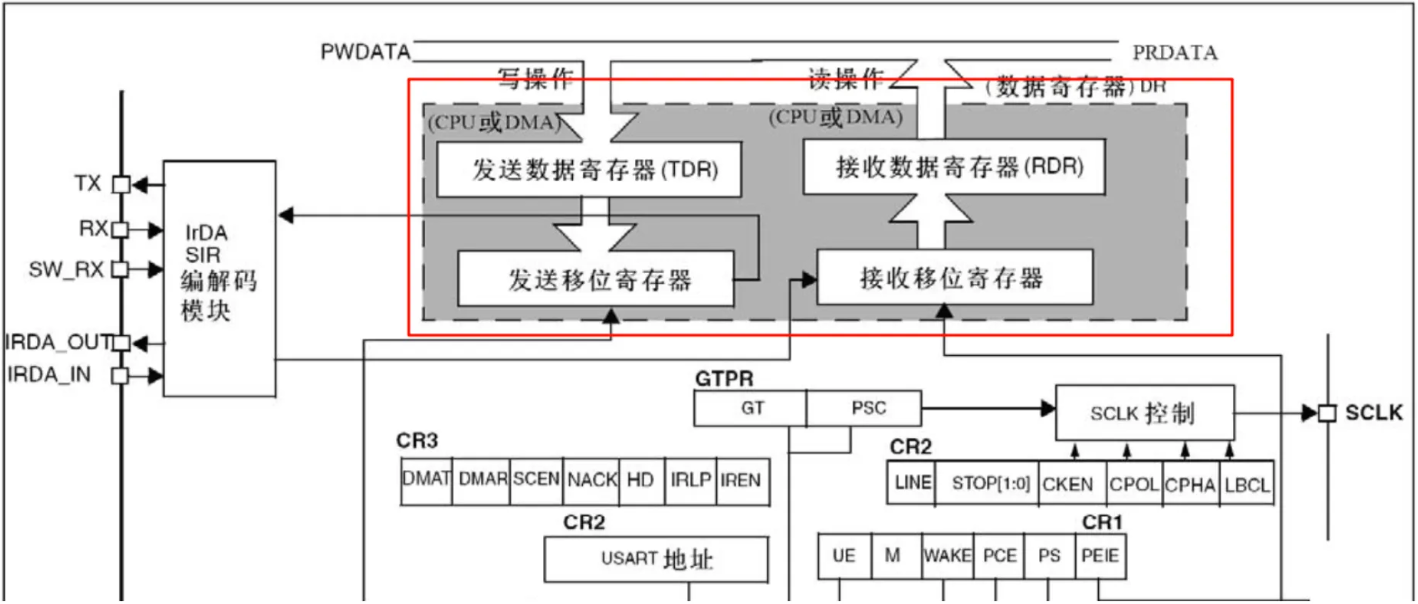
2、数据寄存器
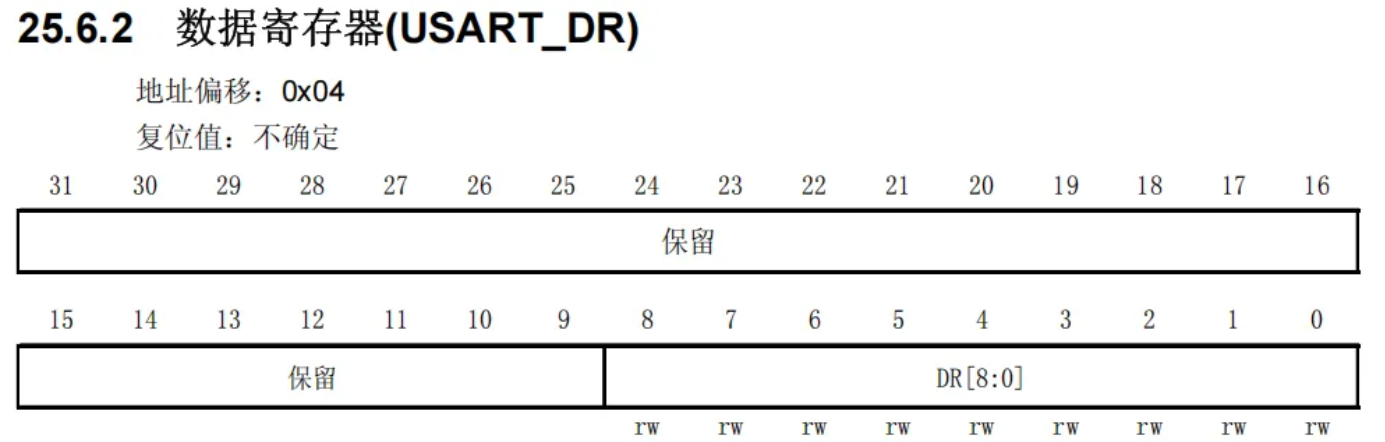
包含了发送或接受寄存器,发送:TDR,接收:RDR
TDR寄存器提供了内部总线和输出移位寄存器之间的并行接口。
RDR寄存器提供了输入移位寄存器和内部总线之间的并行接口。
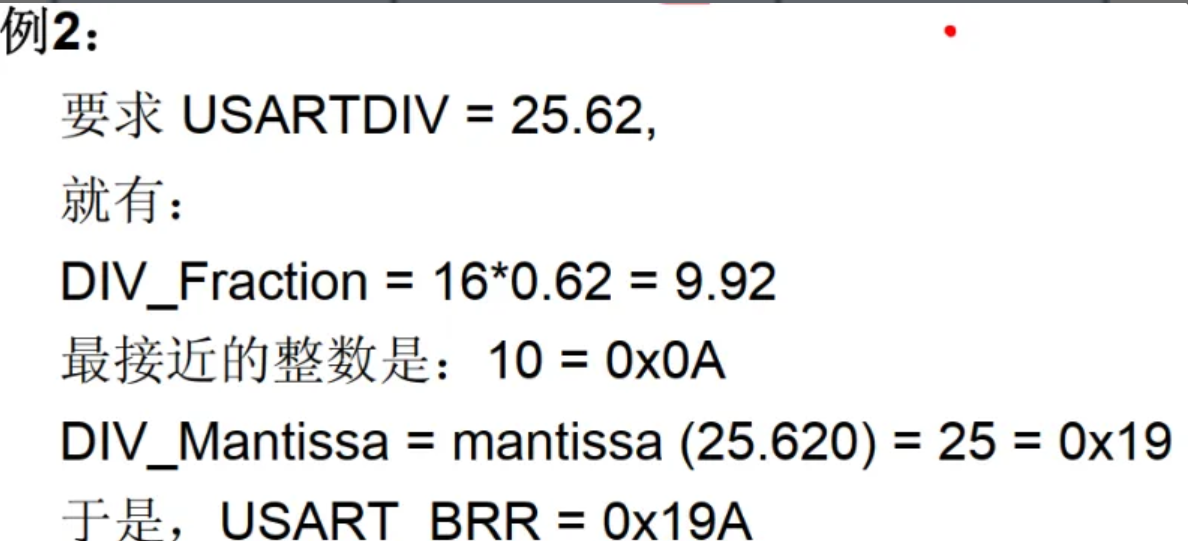
3、波特比率寄存器
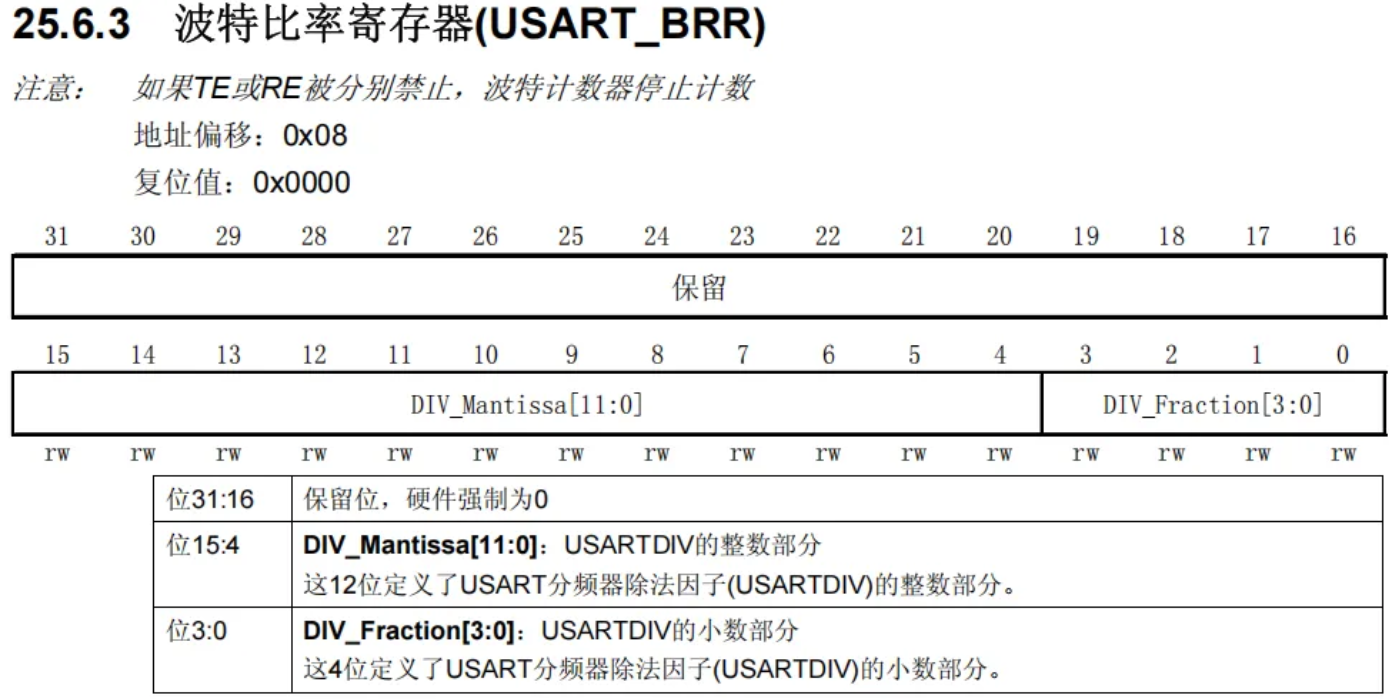
波特率比率寄存器(USARTDIV)的配置 被分为小数和整数两部分
Mantissa是 整数部分
Fraction是 小数部分
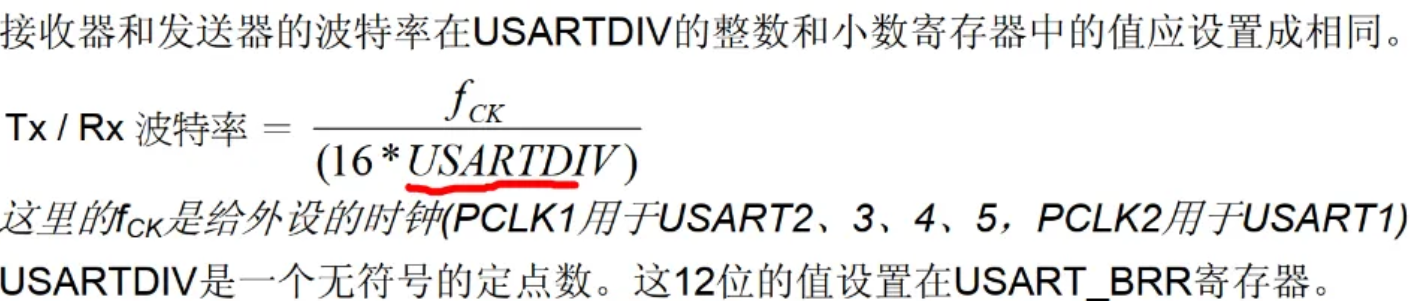
我们需要根据要配置的波特率计算出 USARTDIV ,然后按照下面例题进行配置。
4、控制寄存器
1、控制寄存器1
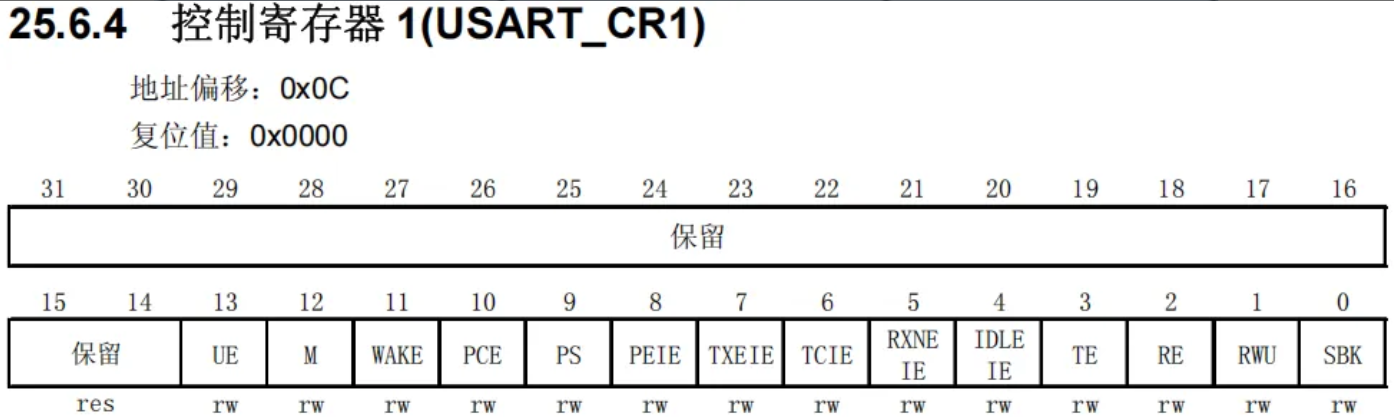
位13:USART使能
位12:字长
0:一个起始位,8个数据位,n个停止位
1:一个起始位,9个数据位,n个停止位
起始位:1bit的低电平
停止位:1bit的高电平
多出来的这个位,可被用于校验或者地址标识
位10:校验控制使能
位3:发送时能
位2:接收使能
补充:校验——奇偶校验
偶校验:检测有效数据 + 校验位1 的个数是否为偶数
奇校验:检测有效数据 + 校验位1 的个数是否为奇数
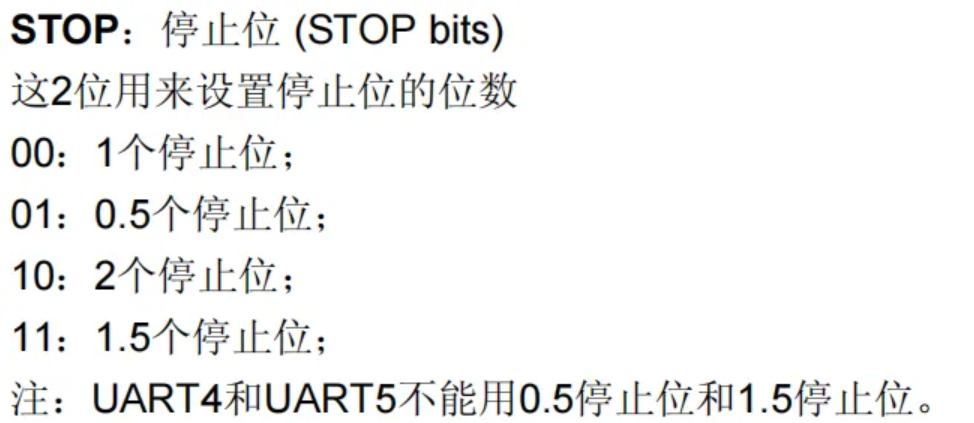
2、控制寄存器2
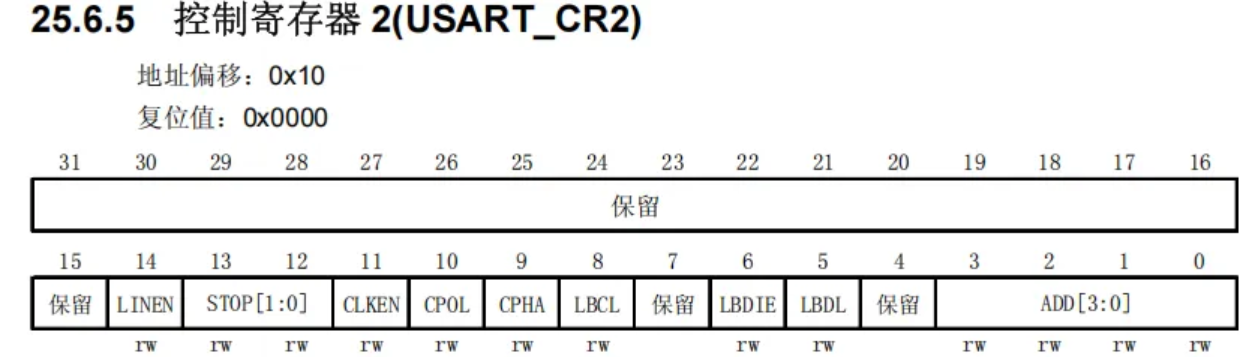
这里我们只需要配置12,13口
这两个是负责停止位的位数的
还有控制寄存器3,我们这里用不到,不详细介绍
知识点2【配置引脚】
我们先看原理图

可以看到,我们需要配置TX,RX引脚
配置输入输出的模式是什么?
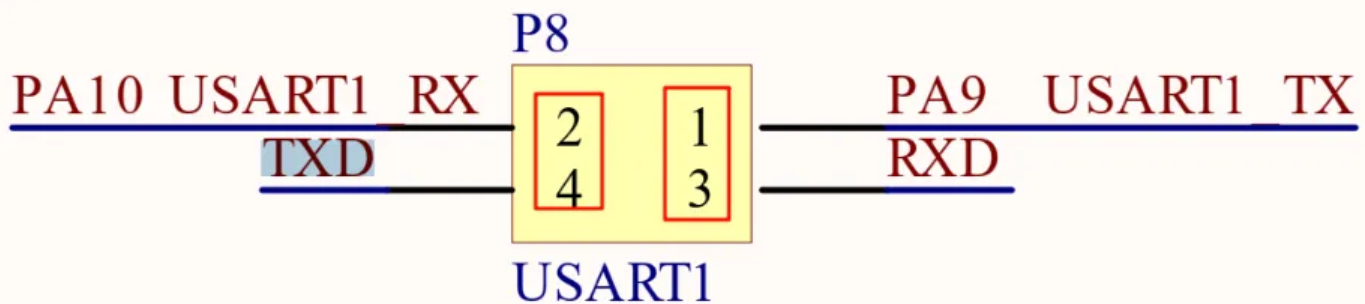
PA9:复用推挽输出
PA10:浮空输入
知识点3【配置流程】
1、初始化函数
1、时钟配置
2、引脚模式设置
3、配置停止位长
4、配置位长
5、使能
2、发送数据函数
3、重定向fputc
由于printf内部是由fputc为基础的,因此我们可以重定向fputc以修改printf的功能
知识点4【代码演示】
#include "stm32f10x.h" // 相当于51单片机中的 #include <reg51.h>
#include "stdio.h"
void usart_init(u32 baud);
void usart_recv();
int fputc(int c, FILE * stream);
int main(void)
{
usart_init(9600);
printf("串口开启完毕\\n");
while(1)
{
usart_recv();
}
}
void usart_init(u32 baud)
{
float div = 0.0f;
u32 div_mantissa = 0;
u32 div_fraction = 0;
//初始化时钟 usart1 在APB2
RCC->APB2ENR |= (0x01 << 14);
RCC->APB2ENR |= (0x01 << 2);
//初始化端口 usart1 的TX引脚是PA9,RX引脚是PA10
//输出引脚模式 复用推挽输出
//输入引脚模式 浮空输入
GPIOA->CRH &= ~(0x0F << 4);
GPIOA->CRH |= (0x09 << 4);
GPIOA->CRH &= ~(0x0F << 8);
GPIOA->CRH |= (0x04 << 8);
//配置总位长
USART1->CR1 &= ~(0x01 << 12);
//配置停止位长
USART1->CR2 &= ~(0x03 << 12);
USART1->CR1 &= ~(0x01 << 10);
//波特率配置
div = 72000000/(baud*16);
div_mantissa = (u32)div;
div_fraction = (u32)((div - (float)div_mantissa)*16 + 0.5f);
USART1->BRR = div_mantissa << 4 | div_fraction;
//使能
USART1->CR1 |= (0x01 << 2);
USART1->CR1 |= (0x01 << 3);
USART1->CR1 |= (0x01 << 13);
}
void usart_recv()
{
u8 c = 0;
while((USART1->SR & (0x01 << 5)) == 0);
c = USART1->DR;
while((USART1->SR & (0x01 << 7)) == 0);
USART1->DR = c;
}
int fputc(int c, FILE * stream)
{
while(!(USART1->SR &(0X01<<7)));
USART1->DR=c;
return c;
}
代码运行结果

所犯错误:
代码错误1
USART1**->**BRR是→而不是_
代码错误2
波特率忘记配置
代码错误3
波特率公式错误,忘记16
结束
代码重在练习!
代码重在练习!
代码重在练习!
今天的分享就到此结束了,希望对你有所帮助,如果你喜欢我的分享,请点赞收藏加关注,谢谢大家!!!


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









