









hello~这里是维小帮,点击文章最下方获取智慧停车场解决方案!如有项目需求和技术交流欢迎大家私聊我们~撒花!
前面我们就智慧停车场已经发布过相关文章了,阅读本文前大家可以去回顾一下,因为本文真的很干货!
停车场导航管理方案之停车导航系统(一):建设背景与发展趋势分析
智能停车解决方案之停车场室内导航系统(二):核心技术与系统架构构建
本文将深入探讨智慧停车场导航系统的核心功能实现,从空车位引导系统的设计思路、算法实现及前端展示,到停车引导路线规划、反向寻车导航的复杂逻辑,再到定位导航精度提升与停车可视化数据平台的搭建,全面且细致地剖析这些关键功能从设计到开发的全过程。通过本文,您将能够掌握构建一个高效、智能、用户友好的智慧停车场导航系统的精髓。
一、空车位引导系统:设计思路、算法实现与前端展示
1、设计思路
空车位引导系统的核心目标在于实时、准确地为用户提供空车位信息,并引导用户快速找到车位。为实现这一目标,系统需要集成物联网传感器、摄像头等设备,实时采集车位占用状态,同时利用先进的算法对用户位置进行定位,并根据车位状态和用户位置为用户规划最优路径。
2、算法实现:最近空车位算法
最近空车位算法通过计算用户当前位置与每个空车位之间的距离,为用户找到最近的空车位。算法步骤如下:
获取用户位置:利用用户手机小程序和停车场内的定位信标,实时获取用户当前位置。
查询空车位信息:从数据库中查询所有空车位的位置信息,包括车位的位置、类型等。
计算距离:采用欧几里得距离公式,计算用户当前位置与每个空车位之间的距离。为了提高计算效率,可以采用空间索引等技术对车位位置进行预处理。
排序与选择:将空车位按距离从小到大排序,选择距离最小的车位作为目标车位。同时,算法还需考虑车位的类型、大小等因素,为用户提供更符合需求的推荐。
def find_nearest_empty_spot(user_position, empty_spots):
# 定义一个函数,用于计算两点之间的欧几里得距离
def calculate_distance(point1, point2):
return ((point1[0] - point2[0]) ** 2 + (point1[1] - point2[1]) ** 2) ** 0.5
# 初始化最近车位和最小距离
nearest_spot = None
min_distance = float('inf')
# 遍历所有空车位,计算距离并更新最近车位
for spot in empty_spots:
distance = calculate_distance(user_position, (spot['x'], spot['y']))
if distance < min_distance:
min_distance = distance
nearest_spot = spot
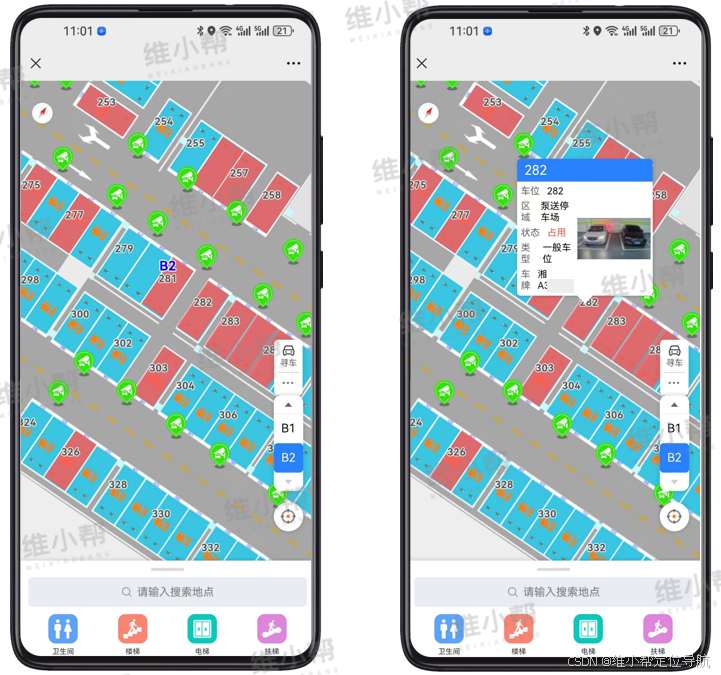
return nearest_spot3、停车引导前端展示技术
前端展示采用HTML5、CSS3及JavaScript等技术,结合电子地图实现空车位信息的可视化展示。用户可以在地图上直观地看到空车位的位置、类型及导航路线。
二、停车引导路线规划:路径规划算法
1、路径规划算法
停车引导路线规划采用A*算法或Dijkstra算法等经典路径规划算法。这些算法能够根据停车场布局及车位位置,为用户规划出最优路径。算法实现过程中,需考虑停车场的地形雷同的特点,加入语音提示、转向提示、文字提示。
# A*算法路径规划(简化版)
import heapq
class Node:
def __init__(self, position, parent=None, cost=0, heuristic=0):
self.position = position # 节点位置
self.parent = parent # 父节点
self.cost = cost # 从起点到当前节点的代价
self.heuristic = heuristic# 启发式函数值(估算从当前节点到终点的代价)
# 定义节点的比较函数,用于优先队列排序
def __lt__(self, other):
return self.cost + self.heuristic < other.cost + other.heuristic
def heuristic(a, b):
# 启发式函数,如曼哈顿距离
return abs(a[0] - b[0]) + abs(a[1] - b[1])
def a_star_search(graph, start, end):
# 初始化起点节点和优先队列
start_node = Node(start)
open_list = []
heapq.heappush(open_list, start_node)
# 初始化已访问节点集合
closed_list = set()
# 循环直到找到终点或优先队列为空
while open_list:
current_node = heapq.heappop(open_list)
closed_list.add(current_node.position)
# 如果当前节点是终点,则构建路径并返回
if current_node.position == end:
path = []
while current_node:
path.append(current_node.position)
current_node = current_node.parent
return path[::-1] # 反转路径并返回
# 遍历当前节点的邻居节点
for neighbor in graph[current_node.position]:
if neighbor not in closed_list:
new_cost = current_node.cost + graph[current_node.position][neighbor]
new_heuristic = heuristic(neighbor, end)
new_node = Node(neighbor, current_node, new_cost, new_heuristic)
# 如果邻居节点已经在优先队列中,且新路径更优,则更新该节点
if any(n.position == neighbor and n.cost > new_cost for n in open_list):
for n in open_list:
if n.position == neighbor and n.cost > new_cost:
n.cost = new_cost
n.parent = current_node
n.heuristic = new_heuristic
break
else:
# 否则,将新节点加入优先队列
heapq.heappush(open_list, new_node)
# 如果未找到终点,则返回空列表
return []
# 调用示例(简化版)
graph = {
(0, 0): {(0, 1): 1, (1, 0): 1},
(0, 1): {(0, 0): 1, (0, 2): 1, (1, 1): 1},
# ...(其他节点及邻居关系)
(end_x, end_y): {} # 终点节点没有邻居
}
start = (start_x, start_y)
end = (end_x, end_y)
path = a_star_search(graph, start, end)2、停车场导航前端设计

三、反向寻车:寻车方式设计
1、搜索车位号寻车:搜索停车位编号,地图定位停车位位置,点击寻车可自动规划寻车路径;
2、扫码记录停车:停车后扫描二维码记录停车位置,点击寻车可自动规划寻车路径;
3、搜索车牌号寻车:对接车位识别系统后可搜索,车牌号寻车,支持模糊搜索。

四、定位导航精度提升:室内定位技术优化与误差校正方法
1、室内定位技术优化
采用蓝牙Beacon室内定位技术,结合地图匹配算法,提高定位精度。
2、误差校正方法
通过融合多种传感器数据(如加速度计、陀螺仪等),采用卡尔曼滤波等算法,对定位结果进行实时校正,减少误差。
五、停车可视化数据平台:数据可视化工具选择、报表设计与BI应用
数据可视化工具选择
采用Tableau、Power BI等数据可视化工具,实现停车场运营数据的可视化展示。
报表设计
设计丰富的报表,如车位占用率报表、车辆进出记录报表等,为停车场管理提供决策支持。
BI应用
结合商业智能(BI)技术,对停车场运营数据进行深入分析,挖掘潜在价值,为停车场优化提供数据支持。

大家还想了解智慧停车场什么方面的信息呢?可以通过留言或投票跟我们交流哦~


















 778
778

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









