









本文面向各工业自动化与IT技术专家们,提出一种解决在复杂的厂区环境中,传统地图导航无法提供足够的精度和实时性,导致运输车辆频繁迷路,严重影响生产效率的高效率方案。
如需获取厂区内部地图导航解决方案请前往文章最下方获取,如有项目合作及技术交流欢迎私信作者。
一、厂区内部地图导航技术概述
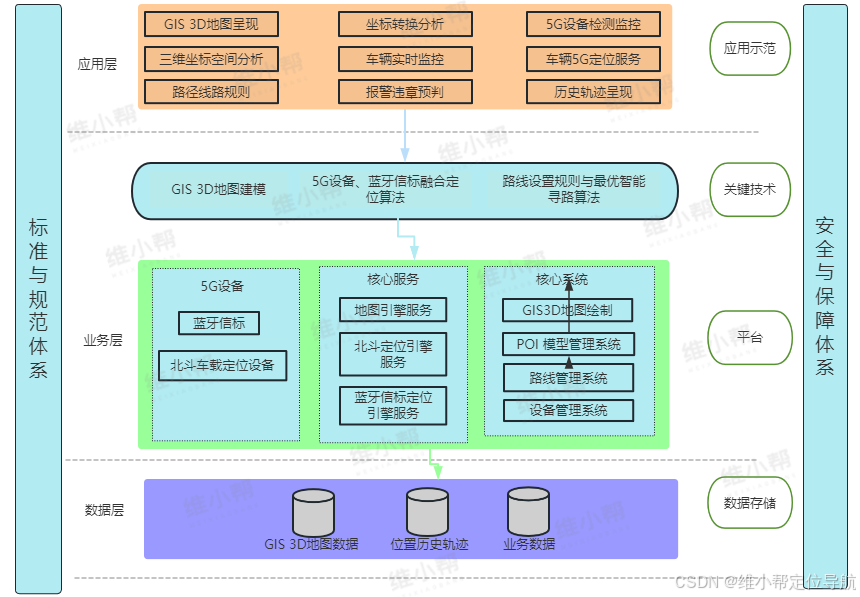
厂区内部地图导航系统是一种专为工厂复杂环境设计的导航解决方案。它结合了高精度定位技术、实时路径规划算法和三维地图展示,能够为运输车辆提供厘米级的定位精度和最优路径规划。与传统地图导航相比,厂区内部地图导航更加注重实时性和细节处理,能够满足工厂物流的高效率、高精度需求。
技术特点:
- 高精度定位:融合GPS、北斗系统及UWB、蓝牙信标等室内定位技术,实现厘米级定位精度。
- 实时路径规划:基于A*、Dijkstra等算法,结合实时交通状况和障碍物信息,动态调整最优路径。
- 三维地图展示:利用GIS技术,提供直观的三维地图视图,展示厂区结构和设施位置。
二、厂区内部地图导航技术实现细节
1. 地图数据采集与处理
地图数据的采集是厂区内部地图导航的基础。我们采用无人机航拍获取厂区的高空影像,结合激光雷达扫描获取地面的高精度三维数据。随后,通过地图建模、路径网络构建和障碍物标识等处理流程,生成可用于导航的数字地图。

代码示例:
# 示例代码:地图数据处理流程
import numpy as np
from sklearn.neighbors import KDTree
def process_map_data(raw_data):
# 地图建模,假设raw_data为激光雷达扫描得到的点云数据
points = np.array(raw_data)
kdtree = KDTree(points) # 构建KD树用于快速邻近搜索
# 路径网络构建(简化版,实际需更复杂处理)
paths = [] # 存储路径节点
for point in points:
# 假设每个点都可作为一个路径节点,实际需根据具体情况筛选
paths.append(point)
# 障碍物标识(假设通过高度差或密度差来标识)
obstacles = identify_obstacles(points, kdtree)
return paths, obstacles
def identify_obstacles(points, kdtree):
# 简化版障碍物标识函数,实际需根据具体算法实现
obstacles = []
# 假设高度超过一定阈值的点视为障碍物
height_threshold = 2.0
for point in points:
if point[2] > height_threshold: # 假设点云数据为(x, y, z)格式
obstacles.append(point)
return obstacles2、高精度定位技术
我们采用GPS和北斗系统提供室外定位,结合蓝牙室内定位技术,通过信号强度(RSSI)进行定位,适用于高精度、低功耗、低成本的场景。
3、实时路径规划算法优化
路径规划算法是厂区内部地图导航的核心。我们采用A*算法和Dijkstra算法作为基础,并结合厂区的实际情况进行优化。为了提高算法效率,我们引入了启发式搜索、剪枝策略和并行计算等技术。
# 示例代码:A*算法路径规划优化版
import heapq
class PriorityQueue:
def __init__(self):
self.elements = []
def empty(self):
return len(self.elements) == 0
def put(self, item):
heapq.heappush(self.elements, item)
def get(self):
return heapq.heappop(self.elements)
def heuristic(a, b):
# 曼哈顿距离作为启发式函数(简化版)
return abs(a[0] - b[0]) + abs(a[1] - b[1])
def a_star_pathfinding(start, goal, grid):
open_set = PriorityQueue()
open_set.put((0, start))
came_from = {}
g_score = {start: 0}
f_score = {start: heuristic(start, goal)}
while not open_set.empty():
current = open_set.get()[1]
if current == goal:
path = reconstruct_path(came_from, current)
return path
for neighbor in get_neighbors(current, grid):
tentative_g_score = g_score[current] + distance(current, neighbor)
if neighbor not in g_score or tentative_g_score < g_score[neighbor]:
came_from[neighbor] = current
g_score[neighbor] = tentative_g_score
f_score[neighbor] = tentative_g_score + heuristic(neighbor, goal)
open_set.put((f_score[neighbor], neighbor))
return None
def reconstruct_path(came_from, current):
total_path = [current]
while current in came_from:
current = came_from[current]
total_path.append(current)
return total_path[::-1] # 反转路径
def get_neighbors(node, grid):
# 简化版邻居获取函数,实际需根据网格地图具体情况实现
directions = [(0, 1), (1, 0), (0, -1), (-1, 0)]
neighbors = []
for direction in directions:
neighbor = (node[0] + direction[0], node[1] + direction[1])
if is_within_grid(neighbor, grid):
neighbors.append(neighbor)
return neighbors
def is_within_grid(node, grid):
# 简化版网格内判断函数
return 0 <= node[0] < len(grid) and 0 <= node[1] < len(grid[0])
def distance(a, b):
# 简化版距离计算函数,实际可使用欧几里得距离等
return abs(a[0] - b[0]) + abs(a[1] - b[1])4、系统架构与集成
厂区内部地图导航系统的整体架构包括前端展示层、后端处理层和数据库存储层。前端展示层提供用户界面,用于显示地图、路径和车辆位置等信息;后端处理层负责地图数据处理、路径规划和定位计算等任务;数据库存储层则保存地图数据、导航信息和车辆轨迹等数据。此外,系统还可以与工厂的ERP、WMS等系统进行集成,实现数据的共享和协同工作。
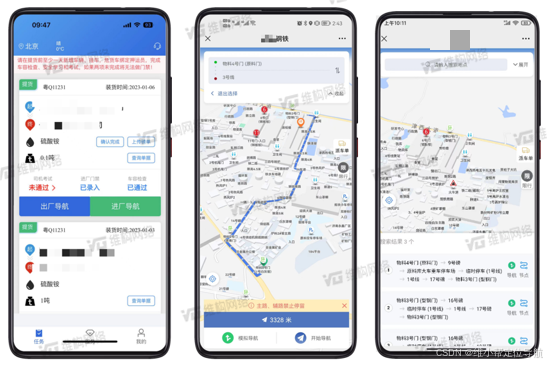
三、厂区内部地图导航技术应用案例
以某大型制造业工厂为例,我们为其部署了厂区内部地图导航系统。该系统成功提高了运输车辆的运输效率,减少了迷路和等待时间,降低了运营成本。同时,系统还提供了实时的车辆监控和调度功能,帮助工厂管理人员更好地掌握车辆动态和物流情况。
四、厂区内部地图导航技术的优势与挑战
优势:
- 高精度定位:融合多种定位技术,实现厘米级定位精度。
- 实时路径规划:结合实时交通状况和障碍物信息,动态调整最优路径。
- 三维地图展示:提供直观的三维地图视图,方便用户理解和使用。
- 系统集成性:可与工厂现有系统无缝集成,实现数据共享和协同工作。
挑战:
- 数据更新与维护:厂区环境经常变化,需要定期更新地图数据和维护系统。
- 定位精度受环境干扰:在复杂环境下,如金属遮挡、电磁干扰等,定位精度可能受到影响。
- 算法效率与实时性:随着厂区规模的扩大,路径规划算法的效率可能成为瓶颈。
针对这些挑战,我们提供了相应的解决方案,如采用先进的地图更新技术、优化定位算法和引入并行计算等。
本文介绍了厂区内部地图导航技术的概述、实现方法、应用案例、优势与挑战以及未来发展趋势。希望这篇文章能够为大家提供有价值的信息和借鉴。如果您有任何疑问或建议,请随时留言交流。
如需获取厂区导航系统解决方案可点击文章最下方↓


















 794
794

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









