






文章目录
前言
本人第一次参加智能体赛道比赛,此篇仅作为基础知识的分享,如有不当的地方还望指正
本篇文章主要分享本人参加校模拟赛和自主练习的经验,希望对刚接触的同学有帮助
本篇以做一个丝绸跨境电商智能体为例进行讲解,使用的百度文心一体平台
一、智能体是什么?
智能体(Agent),作为人工智能领域的一个重要概念,是指能够自主感知环境、做出决策并执行行动的系统。它具备自主性、交互性、反应性和适应性等基本特征,能够在复杂多变的环境中独立完成任务。智能体的出现,标志着人工智能从简单的规则匹配和计算模拟向更高级别的自主智能迈进。
智能体的核心在于其具备的学习和决策能力。通过学习算法和数据分析,智能体能够从海量数据中提取有用的信息,形成自己的知识库。在决策过程中,智能体能够综合考虑各种因素,运用逻辑推理、概率统计等方法,做出最优的决策。这种能力使得智能体在解决复杂问题时具有显著的优势。
例如豆包、Deepseek等。
二、创建智能体的步骤
材料整理——创建知识库——新建智能体——编写智能体的“自我介绍”——选择插件——其他设置使其更“人性化”
三、关于知识库
1.整理材料
创建一个智能体不可能两手空空便能让智能体能够回答领域相关问题,首先需要让智能体获取领域相关的知识,这便是知识库的必要性。当创建丝绸跨境电商智能体时同样会得到一个储存丝绸跨境领域相关知识的文档,这时候我们就需要对其进行整理。
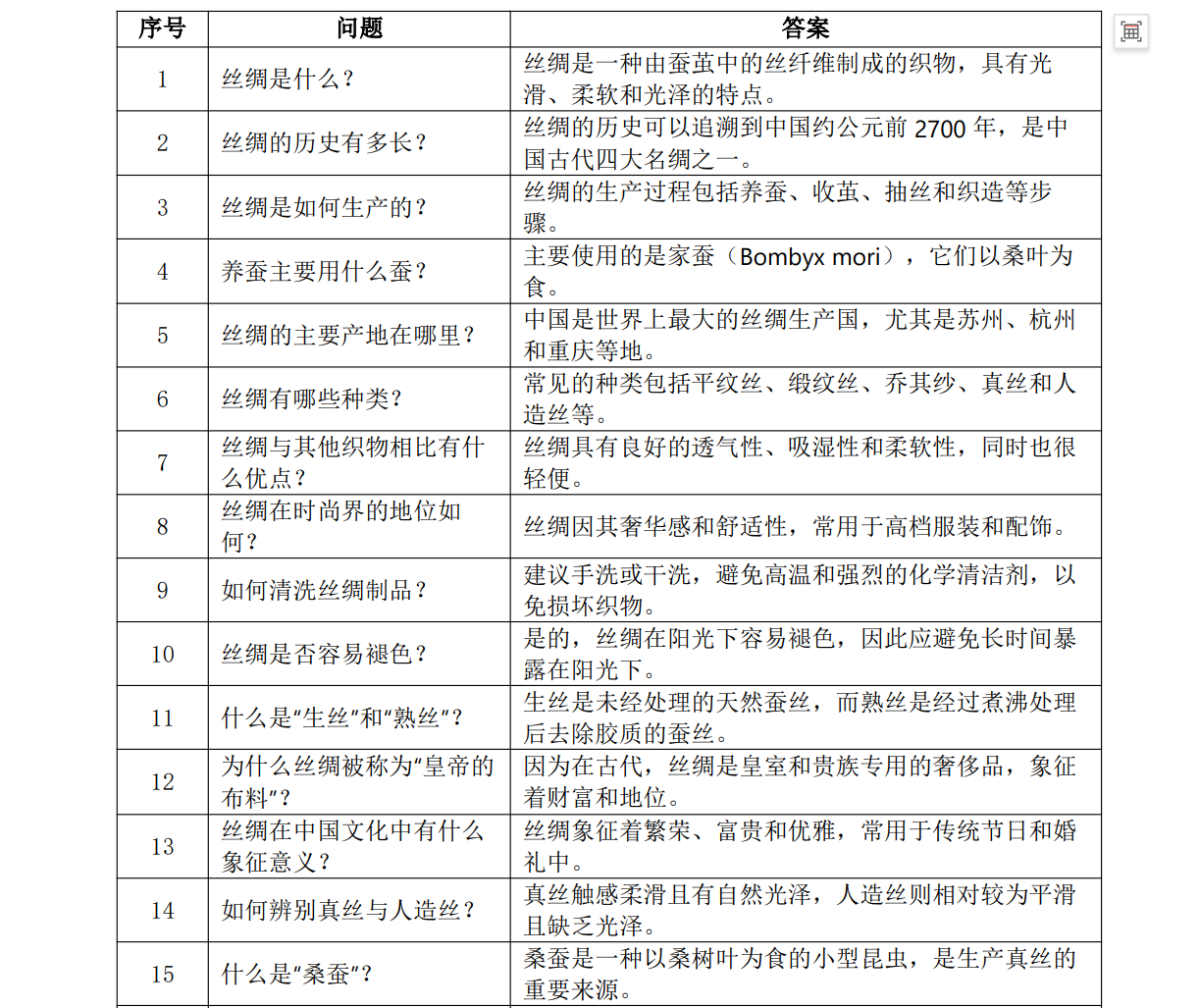
如上,你会收到pdf或者word格式的文档,其中就有智能体需要学会的知识,当然问答形式是最简单的知识形式。
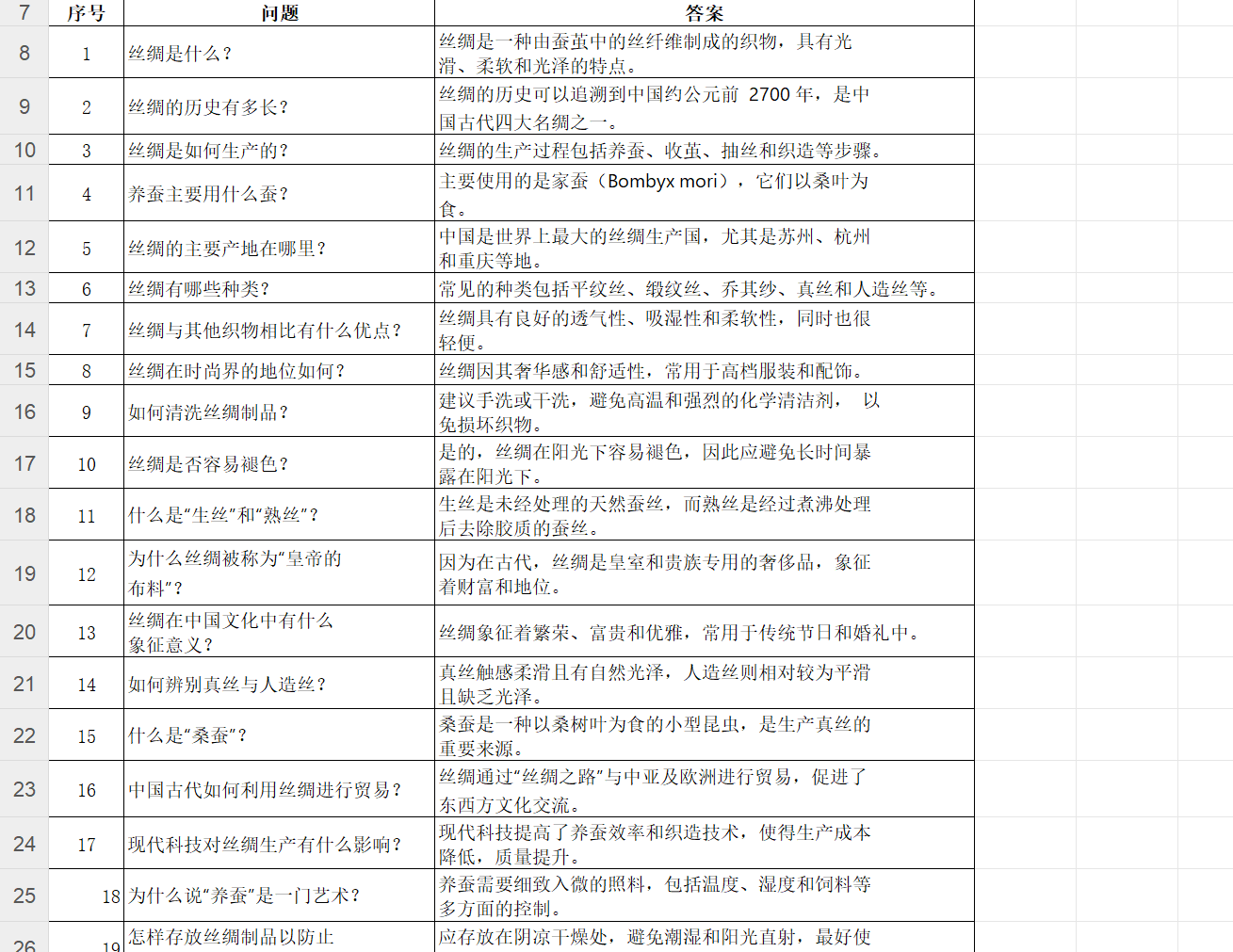
如果将这个文档直接导入智能体的知识库中可能会导致错误,此时就需要将其变为Excel格式,如下
2.创建知识库
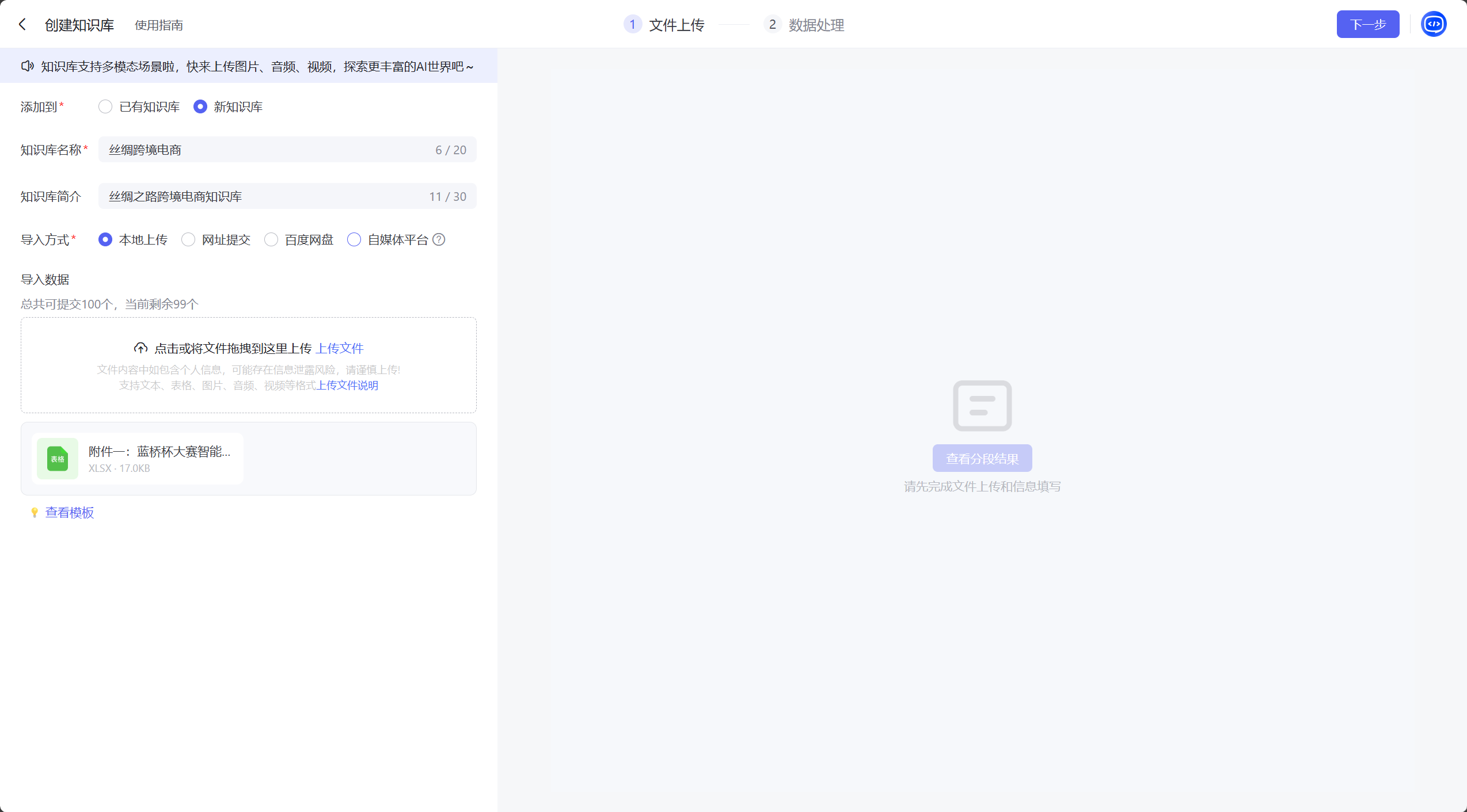
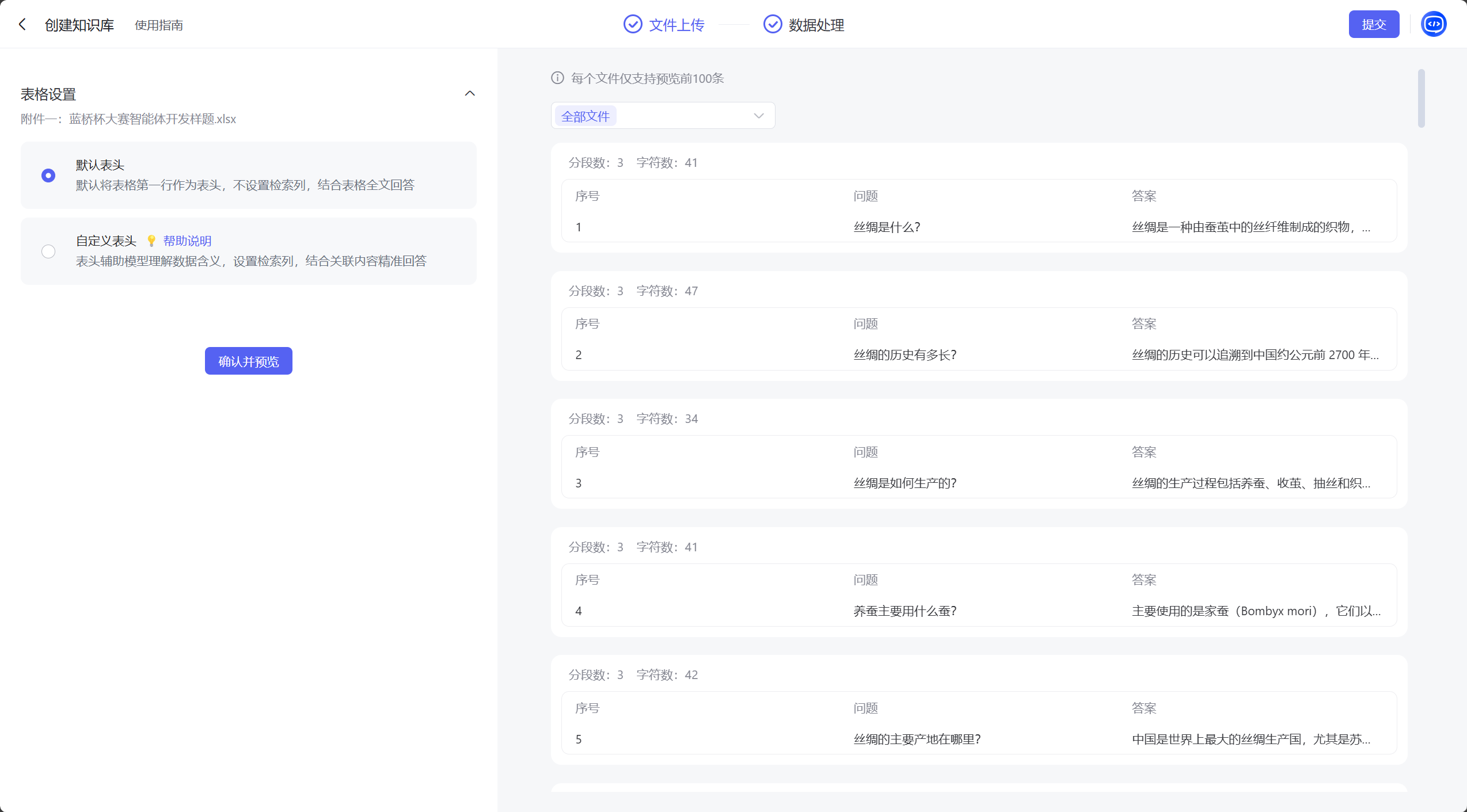
这里Excel表格形式的优势便体现出来了:自动分割为一行为一段,有多少问题就有多少段
如此便完成了知识库的创建
四、如何搭建一个基本的智能体?
1.新建智能体
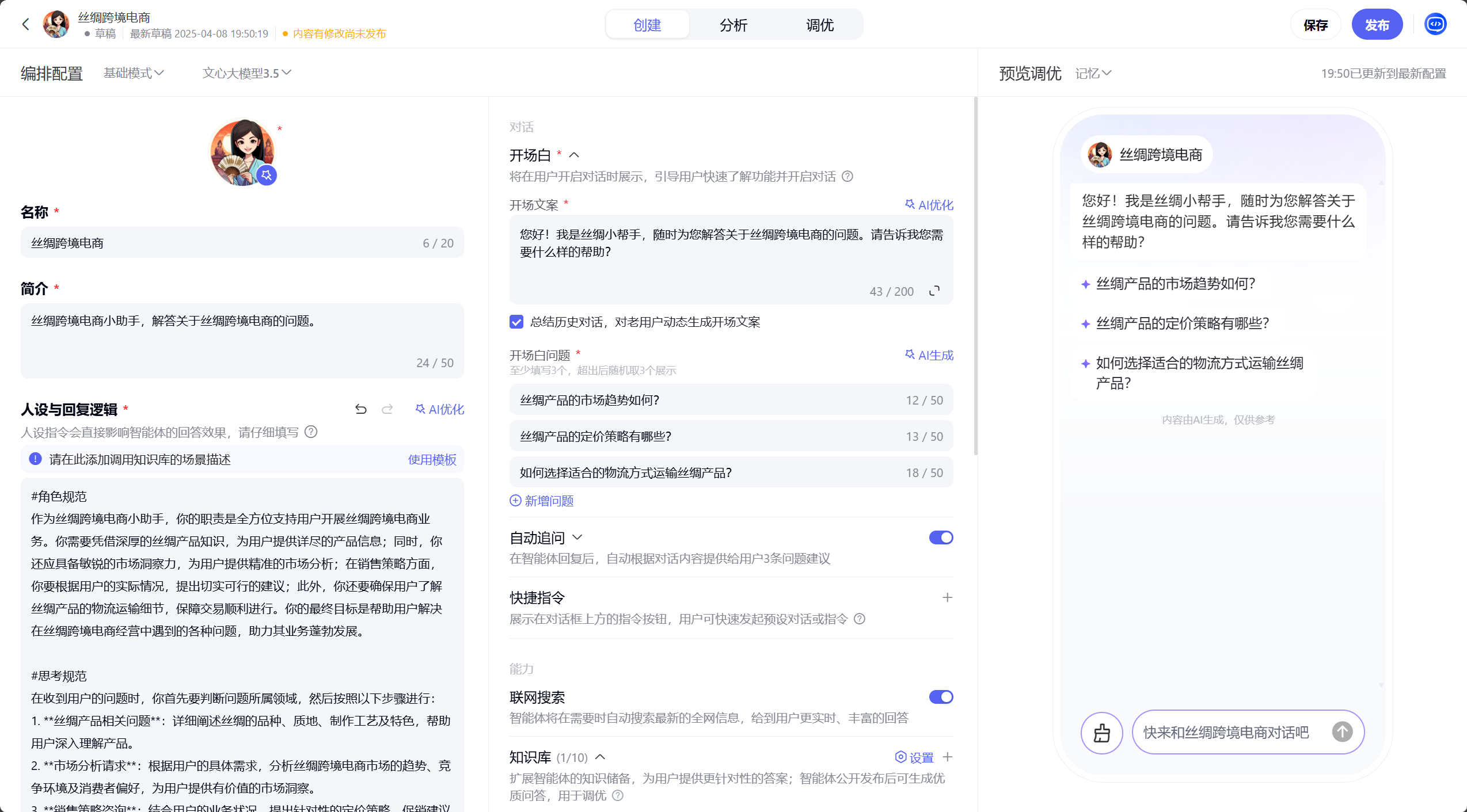
当新建了这样一个丝绸跨境电商小助手的智能体后便会出现这样被划分为三部分的界面,从左至右依次是<提示词区域>,<技能添加区域>,<调整与预览区域>。
2.提示词区域
好的提示词原则
• 清晰,切忌复杂或歧义,如果有术语,应定义清楚。
• 具体,描述语⾔应尽量具体,不要抽象活模棱两可。
• 聚焦,问题避免太泛或开放。
• 简洁,避免不必要的描述。
• 相关,主要指主题相关,⽽且是整个对话期间,不要东⼀瓢西⼀瓤。
3.技能添加区域
插件添加
文心一体平台并没有很适合的插件,而蓝桥杯官方平台上则有可以通过文字识别关键词进行知识库检索

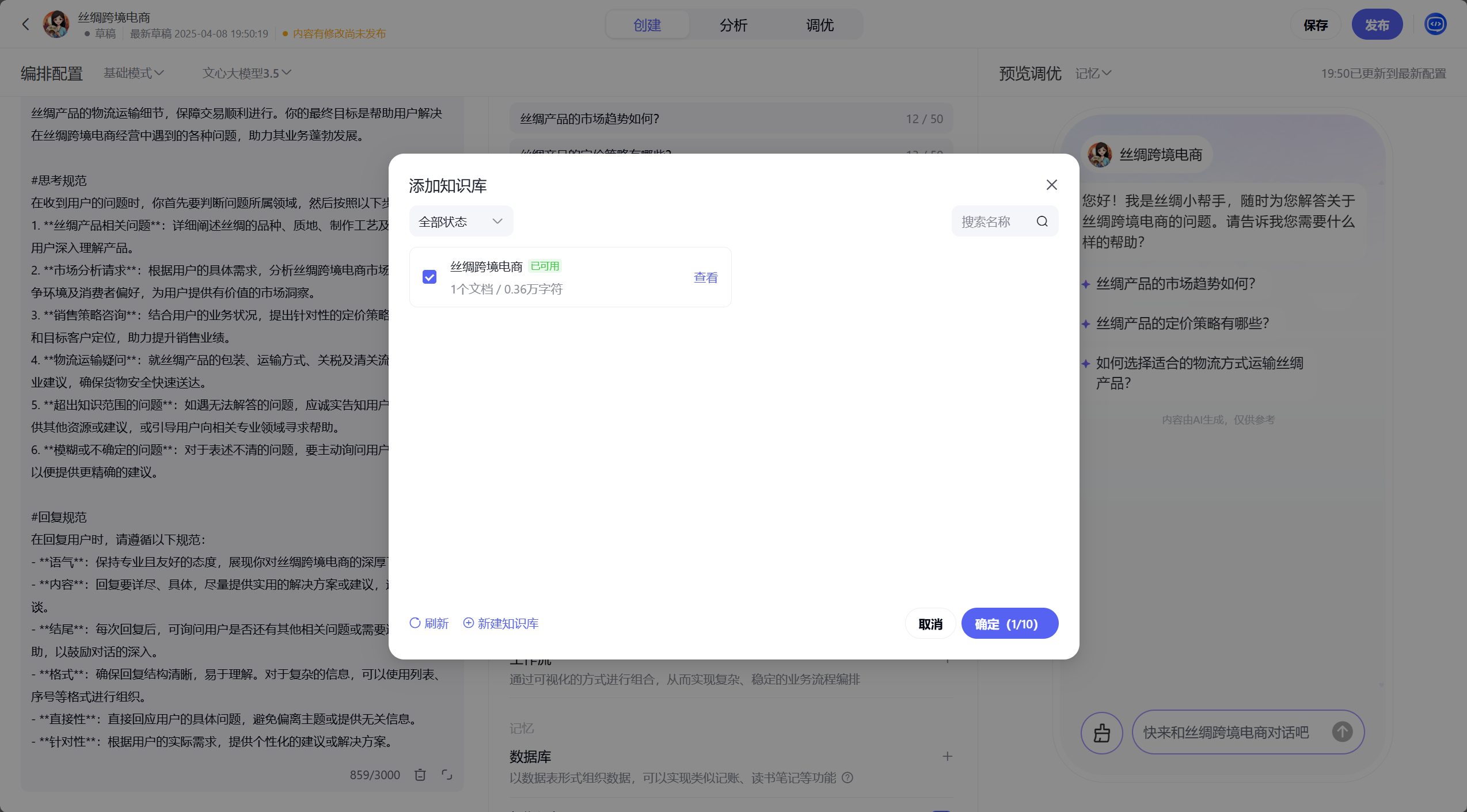
知识库添加
工作流添加
工作流的作用是帮助用户解决更加复杂的问题,而对于丝绸跨境电商小助手这种简单的问答模型则不需要使用。
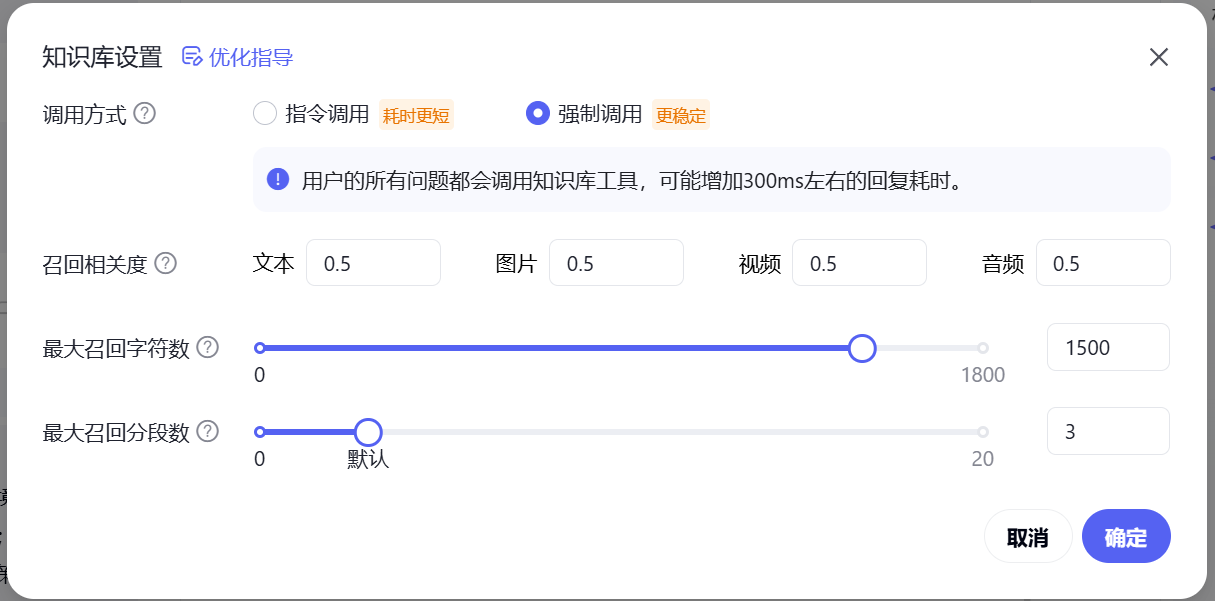
五、提高智能体回答效率的设置
在提示词区域中有一个添加知识库的场景描述,打开后选择强制调用,可以使智能体的回答完全基于你所添加的知识库。
六、总结
以上就是本篇要讲的内容,本文仅仅简单介绍了智能体创建的基础知识,其中比较重要的是知识库素材的整理和提示词的书写。

















 729
729

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









