






话不多说先看成果(zip包含ppt、实验报告、代码文件、训练数据)

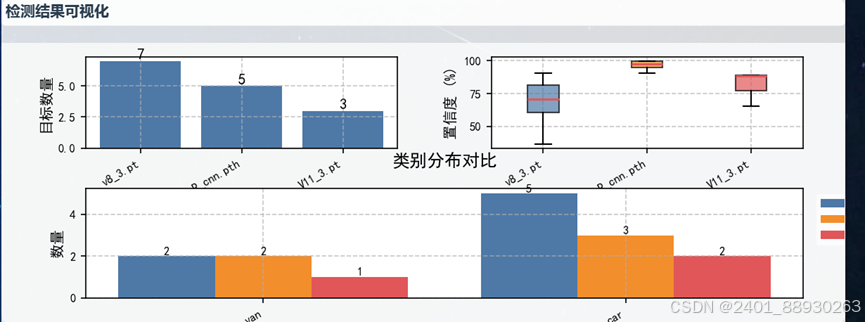
设计包含一个基于pyside6开发的系统,实现功能有对图片检测、视频中车辆的检测、摄像头实时检测、对图片文件夹进行批量检测。对检测结果进行统计,使用不同的模型文件进行检测和和进行对比可视化。如下图



基于深度学习的汽车检验技术研究
在当今快速发展的汽车行业中,传统的汽车检验方法已经难以满足日益复杂的场景需求。从城市化进程的加速到汽车保有量的持续增长,传统的人工检验方法在效率和准确性方面都存在明显的局限性。与此同时,智能交通系统的快速发展为汽车检验技术提供了全新的解决方案。基于深度学习的汽车检验技术不仅能够显著提高检测的精度,还能通过机器学习算法实现自动化的状态评估,为交通管理、车辆维护和保险理赔提供强有力的支持。
一、引言
传统汽车检验方法主要依赖于人工操作,这种方式虽然能够在一定程度上保证检验的准确性,但在面对大量车辆、复杂环境以及效率要求日益提高的场景下,已经难以满足现代交通管理的需要。近年来,深度学习技术在计算机视觉领域取得了突破性进展,为汽车检验提供了新的解决方案。
深度学习算法通过对大量图像和传感器数据的学习,能够自动识别车辆的各个特征,并在复杂背景下有效区分各类异常情况。基于深度学习的汽车检验系统不仅能够实现对车辆外观状态的全面检测,还能通过多模态数据融合技术,提供更全面的车辆状态评估。
二、深度学习在汽车检验中的应用
基于深度学习的汽车检验系统主要依赖于YOLOv8、YOLO11和Faster R-CNN等目标检测算法。这些算法在检测精度和速度方面各有特点,共同构成了汽车检验的核心技术框架。
1. YOLOv8算法
YOLOv8是一种高效且灵活的目标检测算法,其核心优势在于能够通过轻量化技术减少模型的计算复杂度,同时保持较高的检测精度。YOLOv8模型采用多尺度预测(MSP)和残差组卷(C2B)等创新设计,能够在实时性与准确性之间取得良好的平衡。
2. YOLO11算法
YOLO11是一种基于C2P(C2P)模块的扩展目标检测算法,其主要特点是能够通过动态调整模块规模,满足不同场景的需求。YOLO11模型在保持较高检测精度的同时,还能够更好地适应复杂的环境,如夜晚和恶劣天气下的车辆检测。
3. Faster R-CNN算法
Faster R-CNN是一种基于区域建议的检测算法,其主要优势在于能够通过精确的区域建议(RPN)生成候选区域,并结合检测头(Detection Head)进行进一步的特征提取和分类。Faster R-CNN算法在检测精度方面具有显著优势,但其计算复杂度较高,不利于实时性要求较高的场景。
三、数据集与模型构建
要实现基于深度学习的汽车检验系统,数据集的构建与处理是关键。课程设计中的数据集来源于博客文的博客文中的文件夹,包含了训练集和验证集的图片数据,以及对应的标注信息。数据集的来源和具体构成需要进一步明确,但可以从博客文中的文件结构中获取线索。
1. 数据集的构成
数据集分为训练集和验证集,具体比例为9134:2690。训练集用于模型的训练,验证集用于模型的验证。数据集的标注格式包括bus、car、truck、van等类别,反映了不同类型的车辆及其重要性。这些标注信息对于模型的学习和评估具有重要意义。
2. 数据预处理
为了提高模型的泛化能力,数据预处理是不可或缺的步骤。包括数据增强(Data Augmentation)、归一化(Normalization)等操作。数据增强可以通过旋转、翻转、缩放等操作增加数据的多样性,而归一化则能够帮助模型在不同光照条件下保持稳定的性能。
四、模型的构建与训练
基于PyTorch框架,课程设计中的模型主要采用了YOLOv8、YOLO11和Faster R-CNN三种算法。这些算法在检测精度和速度方面各有特点,共同构成了汽车检验的核心技术框架。
1. YOLOv8的实现
YOLOv8模型的实现基于其独特的模块设计,包括Backbone、Neck和Head三个主要部分。 Backbone部分采用了高效的骨干网络,Neck部分通过残差组卷技术实现了模块的深度融合,Head部分则负责生成最终的检测结果。YOLOv8模型在训练初期表现良好,损失函数值逐渐下降,说明模型具有较强的收敛性。
2. YOLO11的实现
YOLO11模型在实现过程中,主要依赖于C2P模块的设计,这种模块能够通过动态调整模块规模,满足不同场景的需求。YOLO11模型在数据增强和模块优化方面表现出色,能够在不同光照条件下保持较高的检测精度。
3. Faster R-CNN的实现
Faster R-CNN模型的实现依赖于区域建议网络(RPN)和检测头(Detection Head)的结合。RPN负责生成候选区域,而检测头则负责对候选区域进行精确的检测和分类。Faster R-CNN模型在检测精度方面具有显著优势,但在计算复杂度上较高,不利于实时性要求较高的场景。
五、实验与结果分析
课程设计中的实验结果表明,基于深度学习的汽车检验系统在检测精度方面具有显著优势。在早期训练阶段,模型已经表现出一定的学习能力,损失函数值逐渐下降,说明模型有潜力在后续的训练中达到较好的性能。
1. 检测精度指标
在实验中,检测精度指标包括边界框平均精度(Box (P))、召回率(Recall)、F1- Score等。这些指标全面反映了模型的检测能力。在前两个训练周期中,模型的边界框平均精度和召回率均有所提升,表明模型在学习过程中逐渐优化。
2. 模型性能评估
除了检测精度,模型的性能还通过GPU内存使用量、边界框损失(box_loss)、分类损失(cls_loss)、其他损失(df_loss)、检测到的实例数量(Instances)等指标进行评估。这些指标的变化可以帮助评估模型的收敛情况和性能表现。
3. 模型不足与改进方向
尽管模型在早期阶段表现良好,但在后续的实验中仍存在一些不足。例如,在第一个训练周期中,边界框损失和分类损失相对较高,召回率较低,表明模型在目标定位和分类准确性方面还有提升空间。针对这些问题,可以尝试调整优化器参数、增加训练数据、调整模型结构、采用数据增强技术等方法进行改进。
六、总结与展望
基于深度学习的汽车检验系统在当前已经取得了显著的成果。通过目标检测算法的引入,系统能够对道路上行驶的汽车进行高效检测,为交通管理和车辆维护提供了强有力的支持。然而,随着应用场景的不断扩展,模型的鲁棒性和实时性仍需进一步提升。
1. 展望
未来的研究方向可以包括以下几个方面:
- 多模态数据融合:结合雷达、激光雷达等传感器数据,通过多模态数据融合的方式,进一步提高车辆信息的获取能力。
- 实时性优化:通过算法优化和硬件加速手
- 段,提升模型的检测速度,使其能够在实时场景中快速响应。
- 复杂环境适应性:针对恶劣天气、夜间行驶等复杂环境,提升模型的鲁棒性和适应性。
- 个性化服务:除了基本的检测功能,还可以扩展到车辆零部件检测、车辆状态判断等更多功能,为交通管理和车辆维护提供更全面的服务。



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









