







STM32GPIO输出实战-LED模板
首先回顾一下上节STM32 HAL GPIO配置步骤:
为LED控制配置GPIO的基本流程:
- 首先定义GPIO配置结构体并初始化为默认值
- 使能对应GPIO端口的时钟
- 配置引脚模式为推挽输出(对LED最适合)
- 设置内部上拉/下拉电阻配置(LED控制通常不需要)
这里配置的上下拉电阻为STM32内部的电阻,上一节只提到了外部上下拉电阻,但他们的作用相同,只有在输入模式(如开关扫描)和开漏输出模式(如PWM和通信)时使用。什么时候使用内部,什么时候使用外部呢?需要较大的驱动能力时使用外部上下拉电阻。因为STM32内部上下拉电阻典型值约为40KΩ(大) (STM32F4系列),而阻值大漏电流小,驱动能力弱1,阻值小漏电流大,驱动能力强,所以内部的驱动能力通常有限,对于需要更强驱动能力的场合,建议使用外部上下拉电阻。
- 设置输出速度(低速即可)
- 应用配置到指定的GPIO端口和引脚
一,LED控制原理
LED(发光二极管)是最常见的输出设备之一,我们通常通过GPIO控制LED的亮灭状态。
1,LED控制时GPIO的配置
对于普通的LED控制,我们通常使用GPIO的输出模式,并且选择推挽输出类型。这种配置可以提供足够的驱动能力来点亮LED。
GPIO模式:输出模式
输出类型:推挽输出
输出速度:低速即可
上下拉:通常不需要
2,LED连接方式
| 项目 | 高电平点亮方式 | 低电平点亮方式 |
|---|---|---|
| 描述 | 将LED的阴极通过限流电阻连接到地(GND),阳极连接到GPIO引脚。当GPIO输出高电平时LED点亮。 | 将LED的阳极连接到电源(VCC),阴极通过限流电阻连接到GPIO引脚。当GPIO输出低电平时LED点亮。 |
| 优点 | 直观,容易理解(高电平=开,低电平=关) | 利用GPIO的吸电流能力,通常更强 |
| 缺点 | 需要GPIO提供源电流能力 | 逻辑反向,不太直观(低电平=开,高电平=关) |
| 注意 | 确保GPIO能提供足够的源电流(通常20mA左右) | 确保GPIO能吸收足够的电流(通常比源电流能力强) |
为什么必须加限流电阻?
Led是一个二极管,正向导通时电阻很小,而STM32 的单个 GPIO 引脚输出电流在几毫安到几十毫安之间,电压为3.3V/5V,如果不加电阻,通路中电流过大,可能烧毁MCU
而且如果通过 LED 的电流过大,超过其额定电流,会使 LED 的发光强度过高,导致其寿命缩短,甚至直接损坏 LED。>通过选择合适阻值的限流电阻,可以根据具体的 LED 参数来调整电流,使 LED 能够正常发光。例如,常见的红色 LED 正向导通电压约为 1.8 - 2.2V,工作电流一般在 10 - 20mA;而蓝色或白色 LED 的正向导通电压较高,约为 3 - 3.6V,工作电流也通常在 20mA 左右





3,使用HAL库控制LED的常用函数:
- HAL_GPIO_WritePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin, GPIO_PinState PinState)
用于设置GPIO引脚输出状态,可以点亮或熄灭LED - HAL_GPIO_TogglePin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
用于切换GPIO引脚状态,实现LED闪烁效果 - HAL_GPIO_ReadPin(GPIO_TypeDef* GPIOx, uint16_t GPIO_Pin)
读取GPIO引脚当前状态,可用于获取LED当前状态
二,任意控制LED模板
1,Led底层
以下是一个使用HAL库控制LED的底层代码实现:
#include "led_app.h"
#include "gpio.h" // 确保包含了HAL库的GPIO头文件
uint8_t ucLed[6] = {1,0,1,0,1,1}; // LED 状态数组 (6个LED)
/**
* @brief 根据ucLed数组状态更新6个LED的显示
* @param ucLed Led数据储存数组 (大小为6)
*/
void led_disp(uint8_t *ucLed)
{
uint8_t temp = 0x00; // 用于记录当前 LED 状态的临时变量 (最低6位有效)
static uint8_t temp_old = 0xff; // 记录之前 LED 状态的变量, 用于判断是否需要更新显示
for (int i = 0; i < 6; i++) // 遍历6个LED的状态
{
// 将LED状态整合到temp变量中,方便后续比较
if (ucLed[i]) temp |= (1 << i); // 如果ucLed[i]为1, 则将temp的第i位置1
}
// 仅当当前状态与之前状态不同的时候,才更新显示
if (temp != temp_old)
{
// 使用HAL库函数根据temp的值设置对应引脚状态 (假设高电平点亮)
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, (temp & 0x01) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 0 (PB12)
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_13, (temp & 0x02) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 1 (PB13)
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_14, (temp & 0x04) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 2 (PB14)
HAL_GPIO_WritePin(GPIOB, GPIO_PIN_15, (temp & 0x08) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 3 (PB15)
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_8, (temp & 0x10) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 4 (PD8)
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_9, (temp & 0x20) ? GPIO_PIN_SET : GPIO_PIN_RESET); // LED 5 (PD9)
temp_old = temp; // 更新记录的旧状态
}
}
/**
* @brief LED 显示处理函数 (主循环调用)
*/
void led_task(void)
{
led_disp(ucLed); // 调用led_disp函数更新LED状态
}
2,代码详细解析
-
头文件包含
代码包含了 “led_app.h”(函数声明)和 “gpio.h”。后者通常由STM32CubeMX生成,包含了HAL库GPIO相关的定义和函数声明,如 HAL_GPIO_WritePin。 -
LED状态数组
uint8_t ucLed[6] = {1,0,1,0,1,1}; 定义了一个包含6个元素的数组,用于存储6个LED的开关状态(1为亮,0为灭),并初始化了状态。
这种方式使得从程序的其他部分可以方便地修改各个LED的状态。 -
状态整合 (位操作)
在 led_disp 函数中,for循环遍历 ucLed 数组。
if (ucLed[i]) temp |= (1 << i); 这行代码是核心:如果第i个LED状态为1,则通过按位或操作 |= 将 temp 变量的第i位置为1。最终,temp 的低6位组合了所有6个LED的状态。 -
性能优化策略
代码使用 static uint8_t temp_old = 0xff; 和 if (temp != temp_old) 来优化性能:
只有当组合后的LED状态 temp 与上次记录的状态 temp_old 不同时,才执行实际的GPIO写操作。
这避免了在LED状态未改变时重复调用 HAL_GPIO_WritePin,减少了CPU负担和潜在的总线访问。 -
HAL库GPIO控制
与之前的51单片机寄存器操作不同,新代码使用了HAL库函数 HAL_GPIO_WritePin 来控制GPIO引脚电平。
例如 HAL_GPIO_WritePin(GPIOB, GPIO_PIN_12, (temp & 0x01) ? GPIO_PIN_SET : GPIO_PIN_RESET);:
GPIOB: 目标GPIO端口。
GPIO_PIN_12: 目标引脚。
(temp & 0x01) ? GPIO_PIN_SET : GPIO_PIN_RESET: 使用按位与 & 检查 temp 的最低位(对应LED 0)。如果为1,则设置引脚为高电平 (GPIO_PIN_SET),否则为低电平 (GPIO_PIN_RESET)。假设高电平点亮LED。
其他LED(1到5)也使用类似逻辑,检查temp的不同位。
这种方法提高了代码的可读性和可移植性。 -
引脚映射
代码明确了6个LED对应的GPIO引脚:
LED 0: PB12
LED 1: PB13
LED 2: PB14
LED 3: PB15
LED 4: PD8
LED 5: PD9
在实际应用中,需要确保这些引脚在STM32CubeMX中已正确配置为推挽输出模式。 -
函数
| 函数名 | 参数 | 返回值 | 功能描述 |
|---|---|---|---|
| led_disp | uint8_t *ucLed - 指向6元素LED状态数组的指针 | void | 根据传入的LED状态数组更新6个LED的GPIO输出。仅当状态变化时执行更新。 |
| led_proc | 无 | void | LED处理函数,供主程序周期性调用,内部调用led_disp更新全局ucLed数组的状态。 |
- 代码移植与注意事项
将此代码用于不同项目时,需要注意:
8.1 引脚定义: 确保 GPIOB, GPIOD, GPIO_PIN_12 到 GPIO_PIN_9 的定义与你的硬件原理图和CubeMX配置一致。
8.2 LED数量: 如果LED数量不是6个,需要修改 ucLed 数组大小、for循环范围 (i < 6) 以及 HAL_GPIO_WritePin 的调用。
8.3 电平逻辑: 代码假设高电平点亮LED (GPIO_PIN_SET)。如果你的电路是低电平点亮,需要将 GPIO_PIN_SET 和 GPIO_PIN_RESET 对调,或者在检查 ucLed[i] 时反转逻辑。
8.4 包含文件: 确保包含了必要的HAL库头文件,通常是 main.h 或特定外设的头文件(如 gpio.h)。
8.5初始化: 此代码只负责更新LED状态,GPIO引脚的初始化(设置为输出模式等)需要在别处完成,通常在 MX_GPIO_Init() 函数中(由CubeMX生成)。
三,实用技巧与注意事项
电流限制
直接连接LED到GPIO引脚时,必须使用限流电阻,否则可能烧毁LED或损坏MCU。根据公式 R = (Vcc - Vf) / If 计算合适的电阻值,其中Vf是LED正向压降,If是期望的电流。
驱动能力
STM32的GPIO引脚驱动能力通常在20mA左右。如果需要驱动大功率LED,请使用三极管或MOSFET进行放大。例如,使用2N2222或BC547等小信号三极管可以轻松控制高达100mA的电流。
逻辑电平
注意LED的接法:高电平驱动(阳极接GPIO)或低电平驱动(阴极接GPIO)。这会影响你的代码逻辑,高电平驱动时写1点亮,低电平驱动时写0点亮。HAL库中可以使用GPIO_PIN_SET或GPIO_PIN_RESET来明确表示。
复用与冲突
确保用于LED控制的GPIO引脚没有被其他功能占用(如UART、SPI等)。在STM32 CubeMX中配置时,应确认引脚功能设置为GPIO_Output而非其他复用功能。如果必须使用已分配的引脚,可以通过合理设计切换机制。
四,常见问题
1,为什么我的LED不亮?
GPIO配置问题:检查GPIO配置是否正确(输出模式、推挽输出)
时钟使能:确认对应GPIO端口的时钟已使能
电平逻辑:检查LED极性是否匹配代码逻辑(高电平点亮还是低电平点亮)
硬件连接:检查限流电阻值是否合适,LED是否连接正确
电源问题:确认微控制器供电电压是否正常
2,LED闪烁很暗,怎么办?
电阻太大:限流电阻值过大会导致LED电流过小,可以适当减小电阻值(注意不要低于LED规格要求)
驱动能力不足:GPIO的输出电流可能不足,考虑使用三极管放大电流
供电电压低:检查MCU供电电压是否在正常范围
LED老化:LED使用时间过长可能导致亮度降低,考虑更换新的LED
3,如何实现LED呼吸效果?
实现LED呼吸效果需要使用PWM(脉宽调制)技术,有以下几种方法:
- 使用硬件定时器PWM:配置STM32的定时器产生PWM信号,通过改变占空比来调节亮度
- 使用软件模拟PWM:通过软件定时控制GPIO开关,模拟PWM效果
- 使用DAC输出:如果LED通过三极管驱动,可以使用DAC输出控制基极电流
实现呼吸效果通常使用正弦或指数函数计算PWM占空比,使亮度渐变更自然。
4,HAL库和寄存器操作哪种方式更好?
两种方式各有优缺点:
HAL库优势:代码可读性好、可移植性强、开发效率高、降低出错风险
HAL库劣势:执行效率略低、代码体积较大、灵活性受限
寄存器操作优势:执行效率高、代码体积小、可以实现更精细的控制
寄存器操作劣势:代码可读性差、可移植性差、开发效率低、容易出错
建议:初学者或注重开发效率时使用HAL库;对性能要求极高或资源极其受限的场景使用寄存器操作。实际项目中常采用混合策略,关键路径使用寄存器操作,其他部分使用HAL库。
5,如何同时控制多个LED实现复杂显示效果?
控制多个LED实现复杂显示效果的方法:
直接GPIO控制:对于少量LED(如8个以内),可以为每个LED分配一个GPIO引脚,直接控制
使用移位寄存器:通过74HC595等移位寄存器,用少量GPIO控制更多LED
LED矩阵:将LED排列成矩阵,通过行列扫描控制,大幅减少所需GPIO数量
LED驱动芯片:使用专用芯片如TLC5940、MAX7219等,通过串行接口控制多达几十个LED
智能LED:使用WS2812等可寻址LED,通过单线控制大量彩色LED
复杂效果通常需要结合定时器中断或RTOS任务调度来实现动画、呼吸灯、流水灯等效果。
漏电流和驱动能力
漏电流就是输出时N-MOS打开时,流过上拉电阻的电流,此电流过大,电阻浪费的能量就大,但同时驱动能力也大
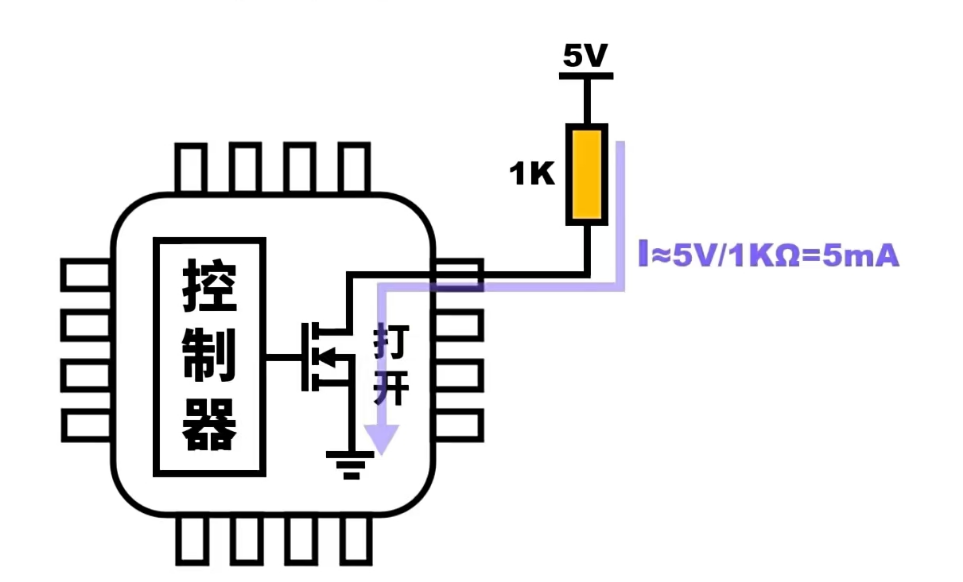
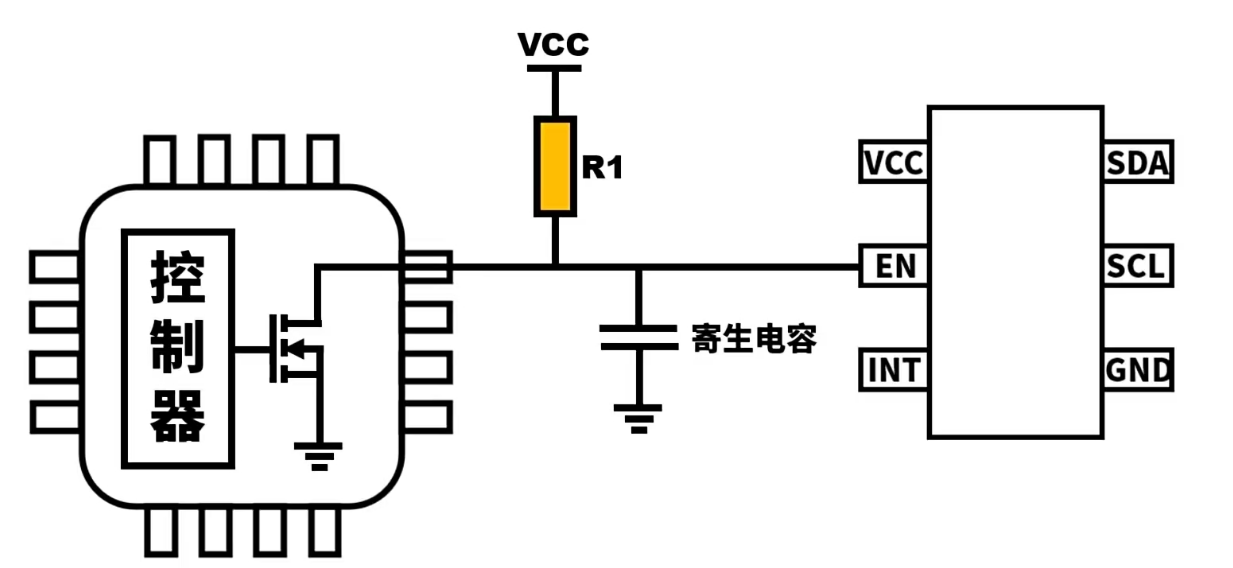
什么是驱动能力呢?
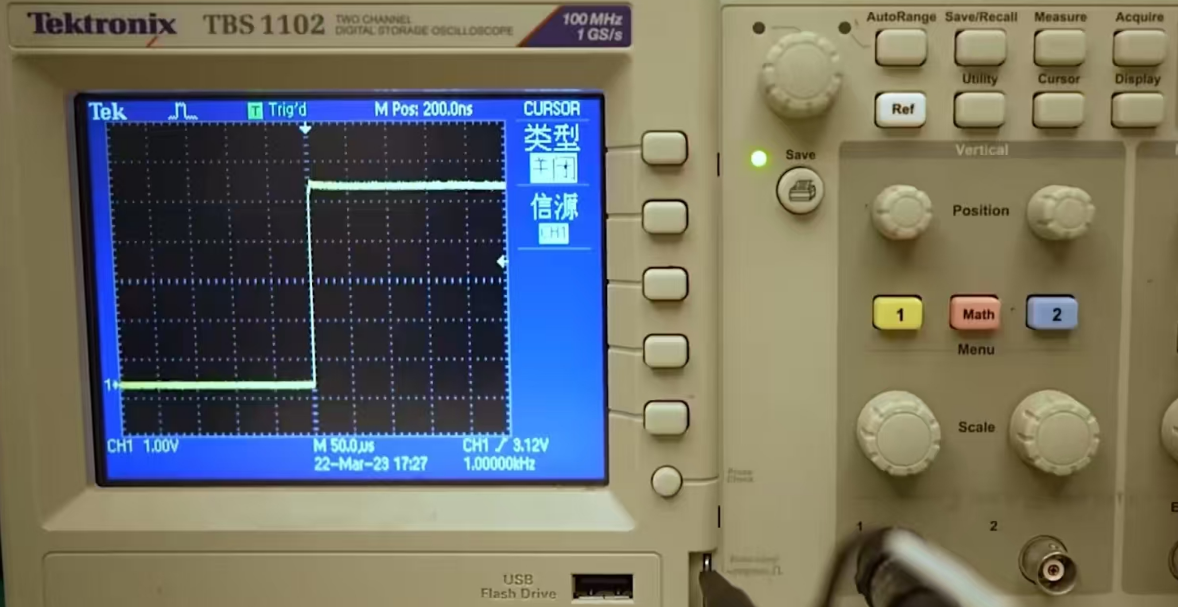
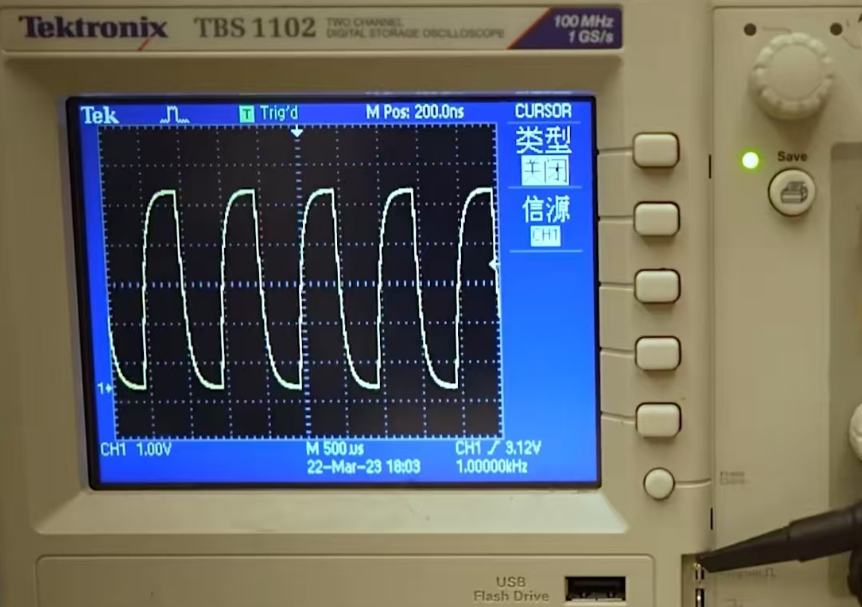
如下图,会产生一个寄生电容,电流首先会给电容充电,冲完电后,后级电路才真正地接收到高电平。显然,电阻大,电流小的时候,充电时间就长
调整示波器的时间,发现从低电平到高电平是一个爬升的过程
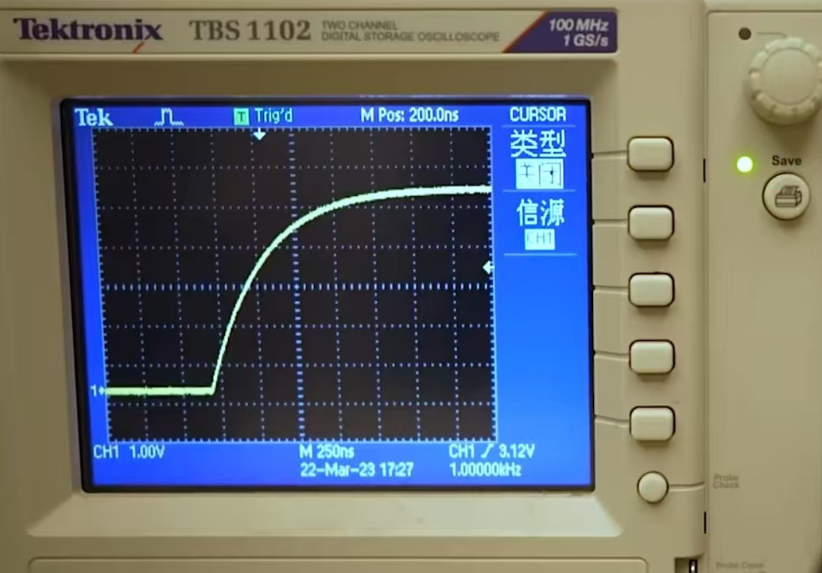
如果在通信时,选择大电阻,就会造成失真
 >上拉电阻取值
>上拉电阻取值
开关扫描:10k-100k
PWM/通信:1k-10k ↩︎


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









