







开关磁阻电机(Switched Reluctance Motor,简称SRM)是一种新型电机,其工作原理基于磁阻最小原理,即磁通总是沿着磁阻最小的路径闭合。以下是开关磁阻电机的主要特点、结构和应用:
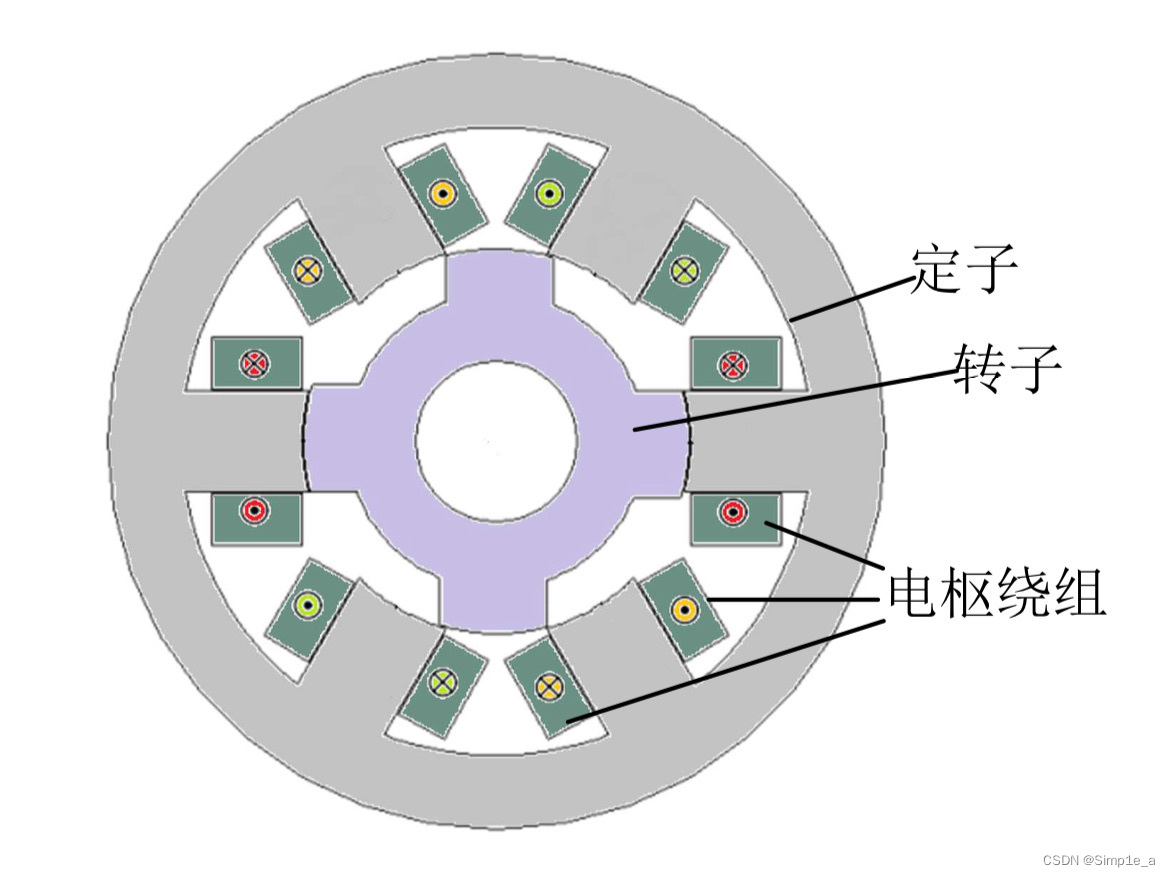
图1 开关磁阻电机结构示意图
特点:
1.结构简单:SRM的结构相对简单,主要由定子和转子组成,定子上有多相绕组,转子为分段的凸极结构,没有永磁体或绕组。
2.可靠性高:由于没有电刷和永磁体,SRM的机械强度高,耐高温,适合在恶劣环境下工作。
3.启动转矩大:SRM在低速时能够提供较大的启动转矩,适合于启动频繁的场合。
4.调速范围宽:SRM可以在很宽的速度范围内实现高效运行,适用于调速要求高的应用。
5.控制灵活:通过控制定子绕组的通电顺序和电流大小,可以方便地控制电机的转速和转矩。
缺点:
1.噪音和振动:SRM在运行时会产生较大的噪音和振动,这主要是由于其工作原理导致的转矩和磁通脉动。这种噪音和振动可能需要额外的措施来控制和减少。
2.效率较低:与永磁同步电机(PMSM)或感应电机相比,SRM在部分负载或高速运行时的效率可能较低。
3.控制系统复杂:SRM需要精确的控制系统来管理电流的开通和关断,这通常意味着需要更复杂的电子控制器和更高的成本。
3.转矩脉动:SRM的转矩脉动较大,这可能导致机械负载的振动,影响系统的稳定性和精确控制。
4.制造和材料成本:虽然SRM的结构相对简单,但由于需要使用高磁导率的材料和特殊的转子设计,其制造成本可能较高。
5.低速性能:SRM在低速运行时可能性能不佳,转矩波动和效率问题可能会更加突出。
结构:

图2 6/4极SRM截面图
图中清晰地展示了电机的内部结构,包括带有6个凸极的定子和4个凸极的转子,以及定子极上的绕组和磁通路径。
1.定子:由多个齿状铁心和绕组组成,每个齿上绕有绕组,形成多相。
2.转子:通常由软磁材料制成,具有凸出的极段,与定子的齿数相对应。
控制系统:
1.驱动器:SRM的驱动器通常包括功率电子开关、控制电路和位置检测器。
2.位置检测:通过检测转子位置来控制定子绕组的通电,实现电机的连续旋转。
3.电流控制:通过调节定子绕组的电流大小和通电时间来控制电机的转矩和转速。

















 429
429

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









