







"模糊PID"通常指的是将模糊逻辑控制(Fuzzy Logic Control),模糊PID控制器的基本原理是将模糊逻辑控制与传统PID控制相结合,以改善控制系统的性能,尤其是在处理非线性、时变或不确定系统时。以下是模糊PID控制的基本原理:
1. 传统PID控制原理
在介绍模糊PID之前,先简要回顾一下传统PID控制的基本原理:
- 比例(P)控制:控制器的输出与当前误差成正比,用于减少当前误差。
- 积分(I)控制:控制器的输出与误差的积分成正比,用于消除稳态误差。
- 微分(D)控制:控制器的输出与误差的变化率成正比,用于预测误差的未来趋势,并提前做出调整。
PID控制器的输出可以表示为:
u(t)=Kpe(t)+Ki∫e(t)dt+Kdde(t)dtu
其中,u(t)是控制器的输出,e(t)是系统误差,Kp、Ki和Kd分别是比例、积分和微分增益。
2. 模糊PID控制原理
模糊PID控制的基本原理是在传统PID控制的基础上,通过模糊逻辑对PID参数进行实时调整。以下是模糊PID控制的主要步骤:
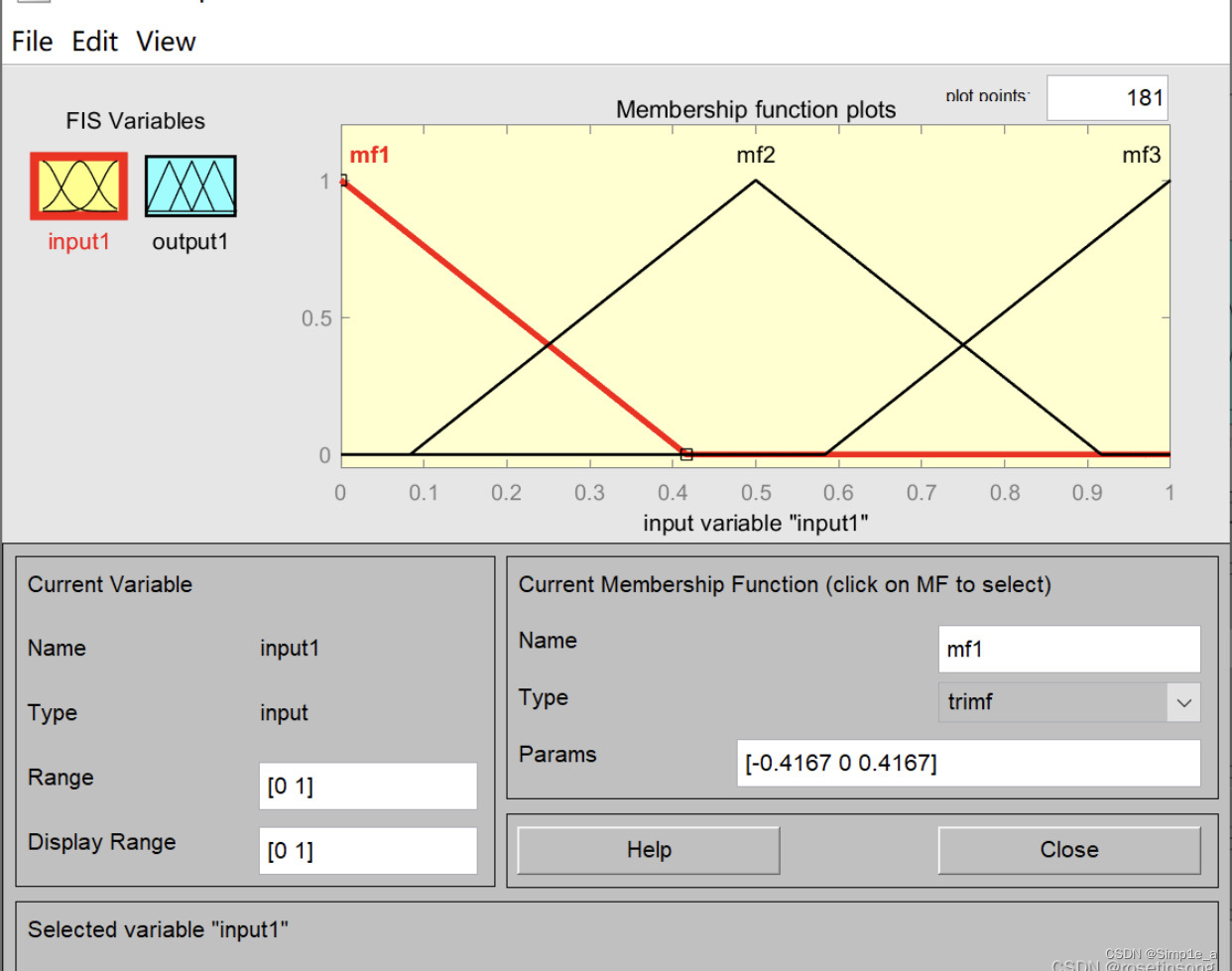
a. 模糊化
将PID控制器的输入(通常是系统误差ee和误差变化率ΔeΔe)转换为模糊变量。这一步涉及将精确的数值转换为模糊集合的隶属度。
b. 模糊规则库
建立模糊规则库,这些规则通常基于专家经验和控制目标。规则库中的每条规则都是IF-THEN形式,例如:
- IF ee is large AND ΔeΔe is increasing THEN increase KpKp and decrease KiKi.
c. 模糊推理
使用模糊逻辑推理方法(如Mamdani推理或Sugeno推理)处理模糊输入和规则库,以产生模糊输出。推理过程涉及到匹配规则的前件,并计算出相应的后件。
d. 解模糊化
将模糊推理得到的模糊输出转换为精确的数值,以调整PID控制器的参数KpKp、KiKi和KdKd。常用的解模糊化方法有中心平均解模糊化、最大隶属度解模糊化等。
3. 模糊PID控制的优势
- 自适应性强:可以根据系统状态自动调整PID参数。
- 鲁棒性好:对系统模型的不精确性和外部干扰有较好的抵抗能力。
- 处理非线性:能够有效处理系统的非线性特性。
4. 模糊PID控制的挑战
- 设计复杂:需要设计模糊规则库和确定隶属度函数,这通常需要大量的试错和经验。
- 计算量大:模糊逻辑处理通常比传统PID控制需要更多的计算资源。

















 207
207

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









