






1. 引言
随着物联网和智能设备的快速发展,传感器在各种应用中变得愈发重要。MPU6050是一款广泛使用的传感器,它集成了3轴加速度计和3轴陀螺仪,广泛应用于智能手机、无人机、机器人、运动追踪设备等领域。本文将深入介绍MPU6050的工作原理、应用以及如何使用它与微控制器进行数据通信。
2. MPU6050概述
MPU6050是由InvenSense公司推出的一款传感器模块,它结合了一个三轴加速度计和一个三轴陀螺仪。加速度计用于检测物体的线性加速度,陀螺仪则用于测量物体的角速度。这两者的结合,使得MPU6050能够实现精准的运动检测和姿态控制。
MPU6050的主要特点:
- 加速度计:具有±2g、±4g、±8g、±16g的测量范围,能够精确测量加速度。
- 陀螺仪:具有±250°/s、±500°/s、±1000°/s、±2000°/s的测量范围,能够测量角速度。
- 低功耗模式:MPU6050具有多种工作模式,能够在低功耗的状态下工作,适用于嵌入式应用。
- I2C接口:MPU6050通过I2C接口与主控设备进行通信,便于与微控制器如STM32、Arduino等进行连接。
3. MPU6050工作原理
MPU6050内部有一个三轴加速度计和一个三轴陀螺仪。它们分别通过不同的传感元件工作:
- 加速度计:通过测量加速度的变化来获取物体的线性加速度。加速度计的原理基于微机电系统(MEMS)技术,通过测量电容变化来感应加速度的变化。
- 陀螺仪:通过测量角速度来确定物体的旋转角度。陀螺仪内部有一个微小的转子,转子在旋转时会产生相应的电荷变化,这些变化被传感器读取,从而计算出物体的角速度。
MPU6050的数据是通过I2C协议传输的。在通信过程中,微控制器通过读取MPU6050的寄存器获取加速度计和陀螺仪的数值。
4. MPU6050的应用
MPU6050在多个领域中都有广泛的应用,尤其是在运动控制、姿态检测和传感器融合中。以下是一些典型的应用场景:
- 智能手机:用于实现屏幕自动旋转、步态识别、手势识别等功能。
- 无人机:在飞行控制中,MPU6050可以实时监测无人机的姿态与加速度,从而保持飞行稳定性。
- 机器人:通过检测机器人各个部位的运动状态,MPU6050帮助实现精确的姿态控制和运动轨迹规划。
- 运动追踪设备:用于监测人体的动作,如运动员的步伐、体态等。
5. MPU6050与微控制器的通信
为了与微控制器(如STM32、Arduino)进行通信,MPU6050通过I2C协议与主控设备连接。下面是如何通过I2C与MPU6050进行数据读取的基本步骤。
I2C 通信实现
在 STM32F103C8T6 的 I2C 通信中,我们可以通过手动控制 SCL(时钟线)和 SDA(数据线)来实现。以下代码展示了如何初始化 I2C,并进行数据读写。
I2C 初始化函数
void IIC_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_IIC_PORT, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; // 设置为输出模式
GPIO_InitStructure.GPIO_Pin = IIC_SCL_PIN | IIC_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(IIC_SCL_PORT, &GPIO_InitStructure);
IIC_SCL_HIGH();
IIC_SDA_HIGH();
}
设置 SDA 为输入模式
void IIC_SDA_IN(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_SDA_PORT, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU; // 设置为输入模式
GPIO_InitStructure.GPIO_Pin = IIC_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(IIC_SDA_PORT, &GPIO_InitStructure);
IIC_SDA_HIGH();
}
设置 SDA 为输出模式
void IIC_SDA_OUT(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_SDA_PORT, ENABLE);
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; // 设置为开漏输出模式
GPIO_InitStructure.GPIO_Pin = IIC_SDA_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(IIC_SDA_PORT, &GPIO_InitStructure);
IIC_SDA_HIGH();
}
启动信号
void IIC_Start(void)
{
IIC_Init();
IIC_SDA_HIGH();
delay;
IIC_SCL_HIGH();
delay;
IIC_SDA_LOW();
delay;
IIC_SCL_LOW();
}
停止信号
void IIC_Stop(void)
{
IIC_Init();
IIC_SCL_LOW();
delay;
IIC_SDA_LOW();
delay;
IIC_SCL_HIGH();
delay;
IIC_SDA_HIGH();
}
等待 ACK 信号
uint8_t IIC_Wait_Ack(void)
{
uint8_t ucErrTime = 0;
IIC_SDA_IN();
IIC_SDA_HIGH();
delay;
IIC_SCL_HIGH();
delay;
while(GPIO_ReadInputDataBit(IIC_SDA_PORT, IIC_SDA_PIN))
{
ucErrTime++;
if(ucErrTime > 250)
{
IIC_Stop();
return 1; // 超时返回错误
}
}
IIC_SCL_LOW();
return 0; // 返回 0 表示正常接收到 ACK
}
发送 ACK
void IIC_Ack(void)
{
IIC_Init();
IIC_SCL_LOW();
delay;
IIC_SDA_HIGH();
delay;
IIC_SDA_LOW();
delay;
IIC_SCL_HIGH();
delay;
IIC_SCL_LOW();
delay;
IIC_SDA_LOW();
}
发送 NACK
void IIC_NACK(void)
{
IIC_Init();
IIC_SCL_LOW(); // 拉低准备数据
delay;
IIC_SDA_HIGH(); // 给一个高电平,表示 NACK
delay;
IIC_SCL_HIGH(); // 发送脉冲告诉从机读 NACK
delay;
IIC_SCL_LOW(); // 释放时钟
}
发送字节
void IIC_Send_Byte(uint8_t address)
{
IIC_SDA_OUT();
for(uint8_t i = 0; i < 8; i++)
{
IIC_SCL_LOW();
delay;
if(address & 0x80)
IIC_SDA_HIGH();
else
IIC_SDA_LOW();
delay;
address <<= 1;
IIC_SCL_HIGH();
delay;
}
IIC_SCL_LOW();
delay;
}
读取字节
uint8_t IIC_Read_Byte(u8 ack)
{
uint8_t receive = 0, i;
IIC_SDA_IN(); // 设置 SDA 为输入模式
for (i = 0; i < 8; i++)
{
IIC_SCL_HIGH(); // 拉高 SCL,让从机发送数据
delay;
if (GPIO_ReadInputDataBit(IIC_SDA_PORT, IIC_SDA_PIN))
receive |= (0x80 >> i); // 读取到 1
IIC_SCL_LOW();
delay;
}
if (!ack)
IIC_NACK();
else
IIC_Ack();
return receive;
}
MPU6050 是一款流行的六轴传感器,集成了三轴加速度计和三轴陀螺仪。它通过 I2C 或 SPI 总线进行通信,并具有许多功能寄存器用于配置、控制以及读取传感器数据。下面是一些关键的 MPU6050 寄存器、它们的地址、读写方式以及作用。
1. WHO_AM_I (0x75)
- 地址: 0x75
- 读取: 1字节
- 作用: 这个寄存器用于验证 MPU6050 是否正常工作。读取时,它返回一个固定值 0x68。如果读取到的值与此不同,可能表示连接错误或者硬件故障。
2. PWR_MGMT_1 (0x6B)
- 地址: 0x6B
- 读取/写入: 1字节
- 作用: 该寄存器用于控制 MPU6050 的电源管理功能。它决定了是否启用设备(比如是否关闭传感器或者将其置于休眠模式)。
常用设置:0x00: 设备启用,使用默认时钟源。0x40: 设备进入休眠模式。
3. PWR_MGMT_2 (0x6C)
- 地址: 0x6C
- 读取/写入: 1字节
- 作用: 该寄存器用于进一步配置传感器的电源管理,特别是控制陀螺仪和加速度计的电源。
常用设置:0x00: 启用所有传感器(加速度计和陀螺仪)。0x38: 关闭陀螺仪的输出,仅启用加速度计。
4. CONFIG (0x1A)
- 地址: 0x1A
- 读取/写入: 1字节
- 作用: 用于配置陀螺仪的低通滤波器。该寄存器设置滤波器的带宽,并影响陀螺仪的噪声和响应速度。
常用设置:0x00: 不使用低通滤波器,最大带宽。0x06: 设置带宽为 5Hz,适用于较低的噪声环境。
5. GYRO_CONFIG (0x1B)
- 地址: 0x1B
- 读取/写入: 1字节
- 作用: 配置陀螺仪的量程,决定测量角速度的最大范围。不同的范围选择会影响分辨率。
常用设置:0x00: ±250°/s0x08: ±500°/s0x10: ±1000°/s0x18: ±2000°/s
6. ACCEL_CONFIG (0x1C)
- 地址: 0x1C
- 读取/写入: 1字节
- 作用: 配置加速度计的量程。它决定加速度计的最大测量范围。
常用设置:0x00: ±2g0x08: ±4g0x10: ±8g0x18: ±16g
7. ACCEL_XOUT_H (0x3B)
- 地址: 0x3B
- 读取: 2字节(高字节和低字节)
- 作用: 读取加速度计在 X 轴上的数据。返回的是 16 位有符号整数,单位是“g”。
需要注意的是,数据的高字节和低字节需要合并。
8. ACCEL_YOUT_H (0x3D)
- 地址: 0x3D
- 读取: 2字节
- 作用: 读取加速度计在 Y 轴上的数据。
9. ACCEL_ZOUT_H (0x3F)
- 地址: 0x3F
- 读取: 2字节
- 作用: 读取加速度计在 Z 轴上的数据。
10. GYRO_XOUT_H (0x43)
- 地址: 0x43
- 读取: 2字节
- 作用: 读取陀螺仪在 X 轴上的数据。返回的是 16 位有符号整数,单位是“°/s”。
11. GYRO_YOUT_H (0x45)
- 地址: 0x45
- 读取: 2字节
- 作用: 读取陀螺仪在 Y 轴上的数据。
12. GYRO_ZOUT_H (0x47)
- 地址: 0x47
- 读取: 2字节
- 作用: 读取陀螺仪在 Z 轴上的数据。
13. INT_ENABLE (0x38)
- 地址: 0x38
- 读取/写入: 1字节
- 作用: 配置 MPU6050 的中断功能。通过设置不同的位,可以启用或禁用不同类型的中断,例如数据准备中断、FIFO 中断等。
14. INT_STATUS (0x3A)
- 地址: 0x3A
- 读取: 1字节
- 作用: 读取当前的中断状态。它指示哪些中断已被触发。通常用于处理中断和进行相应的动作。
15. FIFO_EN (0x23)
- 地址: 0x23
- 读取/写入: 1字节
- 作用: 配置 MPU6050 的 FIFO 功能,允许将加速度计和陀螺仪的数据写入 FIFO 队列,以便批量读取。
16. USER_CTRL (0x6A)
- 地址: 0x6A
- 读取/写入: 1字节
- 作用: 配置 MPU6050 的控制功能,启用或禁用 FIFO 和其他功能,如串行接口等。
//1读 0写
#define MPU_WHO_AM_I 0x75
#define MPU_ADDR_0 0x68
#define MPU_ADDR_1 0x69
#define MPU_READ 0xD1
#define MPU_WRITE 0xD0
#define MPU_CFG_REG 0X1A //配置寄存器
#define MPU_GYRO_CFG_REG 0X1B //陀螺仪配置寄存器
#define MPU_ACCEL_CFG_REG 0X1C //加速度计配置寄存器
#define MPU_PWR_MGMT1_REG 0X6B //电源管理寄存器1
#define MPU_PWR_MGMT2_REG 0X6C //电源管理寄存器2
#define MPU_SAMPLE_RATE_REG 0X19 //采样频率分频器
#define MPU_INT_EN_REG 0X38 //中断使能寄存器
#define MPU_USER_CTRL_REG 0X6A //用户控制寄存器
#define MPU_FIFO_EN_REG 0X23 //FIFO使能寄存器
#define MPU_INTBP_CFG_REG 0X37 //中断/旁路设置寄存器
#define MPU_ACCEL_XOUTH_REG 0X3B //加速度值,X轴高8位寄存器
#define MPU_ACCEL_XOUTL_REG 0X3C //加速度值,X轴低8位寄存器
#define MPU_ACCEL_YOUTH_REG 0X3D //加速度值,Y轴高8位寄存器
#define MPU_ACCEL_YOUTL_REG 0X3E //加速度值,Y轴低8位寄存器
#define MPU_ACCEL_ZOUTH_REG 0X3F //加速度值,Z轴高8位寄存器
#define MPU_ACCEL_ZOUTL_REG 0X40 //加速度值,Z轴低8位寄存器
#define MPU_TEMP_OUTH_REG 0X41 //温度值高八位寄存器
#define MPU_TEMP_OUTL_REG 0X42 //温度值低8位寄存器
#define MPU_GYRO_XOUTH_REG 0X43 //陀螺仪值,X轴高8位寄存器
#define MPU_GYRO_XOUTL_REG 0X44 //陀螺仪值,X轴低8位寄存器
#define MPU_GYRO_YOUTH_REG 0X45 //陀螺仪值,Y轴高8位寄存器
#define MPU_GYRO_YOUTL_REG 0X46 //陀螺仪值,Y轴低8位寄存器
#define MPU_GYRO_ZOUTH_REG 0X47 //陀螺仪值,Z轴高8位寄存器
#define MPU_GYRO_ZOUTL_REG 0X48 //陀螺仪值,Z轴低8位寄存器要读取和写入一个字节到 MPU6050 的寄存器,我们可以通过 I2C 总线进行通信。这里我将展示如何使用之前提供的 I2C 驱动函数来进行字节读取和写入。
1. 写一个字节到 MPU6050
通过 I2C 写操作,将一个字节数据写入到指定的寄存器。
void IIC_Write_Byte(uint8_t reg, uint8_t data)
{
IIC_Start(); // 启动信号
IIC_Send_Byte(MPU6050_ADDR << 1); // 发送设备地址 (左移1位,写操作)
IIC_Wait_Ack(); // 等待ACK
IIC_Send_Byte(reg); // 发送寄存器地址
IIC_Wait_Ack(); // 等待ACK
IIC_Send_Byte(data); // 发送数据字节
IIC_Wait_Ack(); // 等待ACK
IIC_Stop(); // 停止信号
}
在这个函数中:
MPU6050_ADDR是 MPU6050 的 I2C 地址 (通常是0x68或0x69,取决于地址引脚的连接状态)。reg是寄存器地址,data是要写入的数据字节。IIC_Start()用于发送 I2C 启动信号,IIC_Send_Byte()用于发送数据,IIC_Wait_Ack()用于等待每次数据发送后的 ACK 响应。
2. 读一个字节从 MPU6050
通过 I2C 读取一个字节的数据,从指定的寄存器中获取数据。
uint8_t IIC_Read_Byte(uint8_t reg)
{
uint8_t data;
IIC_Start(); // 启动信号
IIC_Send_Byte(MPU6050_ADDR << 1); // 发送设备地址 (左移1位,写操作)
IIC_Wait_Ack(); // 等待ACK
IIC_Send_Byte(reg); // 发送寄存器地址
IIC_Wait_Ack(); // 等待ACK
IIC_Start(); // 重启信号(从设备读取数据)
IIC_Send_Byte((MPU6050_ADDR << 1) | 0x01); // 发送设备地址 + 读取操作(右移1位)
IIC_Wait_Ack(); // 等待ACK
data = IIC_Read_Byte(0); // 读取数据字节,0 表示返回 NACK,结束读取
IIC_Stop(); // 停止信号
return data; // 返回读取的字节
}
在这个函数中:
MPU6050_ADDR是 MPU6050 的 I2C 地址。reg是我们希望读取的寄存器地址。- 在开始读操作之前,我们发送一个启动信号,然后发送设备地址(
MPU6050_ADDR << 1),并接着发送寄存器地址。 - 为了执行读操作,我们再发送一个重启信号,并将设备地址的最低位设置为
1,表示读取操作。 - 最后,我们使用
IIC_Read_Byte()函数读取一个字节的数据,并返回该字节。
例子
假设我们要读取 WHO_AM_I 寄存器(地址为 0x75),并检查返回值来验证 MPU6050 是否正常工作:
uint8_t who_am_i;
who_am_i = IIC_Read_Byte(0x75); // 读取 WHO_AM_I 寄存器
if (who_am_i == 0x68) {
// MPU6050 正常工作
printf("MPU6050 I2C Address is correct!\n");
} else {
// 读取错误
printf("MPU6050 I2C Address is incorrect!\n");
}
MPU6050 的初始化主要包括配置传感器的工作模式、传感器的量程、以及其他配置寄存器。下面是一个简单的 MPU6050 初始化代码示例:
#include "mpu6050.h"
// MPU6050 I2C 地址
#define MPU6050_ADDR 0x68 // 默认地址 (AD0 = 0)
void MPU6050_Init(void)
{
uint8_t temp;
// 1. 确保 MPU6050 处于正常工作状态
IIC_Write_Byte(0x6B, 0x00); // 将 PWR_MGMT_1 寄存器清零,解除休眠模式
delay(100); // 等待 100 毫秒
// 2. 配置陀螺仪和加速度计的量程
// 设置陀螺仪的量程(FS_SEL: 0x00 - 250度/秒, 0x08 - 500度/秒, 0x10 - 1000度/秒, 0x18 - 2000度/秒)
IIC_Write_Byte(0x1B, 0x00); // 陀螺仪量程设置为 250度/秒
delay(10);
// 设置加速度计的量程(AFS_SEL: 0x00 - 2g, 0x08 - 4g, 0x10 - 8g, 0x18 - 16g)
IIC_Write_Byte(0x1C, 0x00); // 加速度计量程设置为 2g
delay(10);
// 3. 配置数字低通滤波器 (DLF) 和采样率
IIC_Write_Byte(0x19, 0x07); // 设置采样率为 1kHz,采样率分频因子为 8
delay(10);
// 4. 配置中断
IIC_Write_Byte(0x38, 0x01); // 开启数据就绪中断
delay(10);
// 5. 读取 WHO_AM_I 寄存器,确认 MPU6050 是否正常连接
temp = IIC_Read_Byte(0x75); // 读取 WHO_AM_I 寄存器的值
if (temp == 0x68) {
// MPU6050 正常连接
printf("MPU6050 Initialized Successfully!\n");
} else {
// MPU6050 初始化失败
printf("MPU6050 Initialization Failed. WHO_AM_I = 0x%02X\n", temp);
}
}
MPU6050 数据获取
在成功初始化 MPU6050 并配置好 I2C 后,我们可以通过读取 MPU6050 的加速度计、陀螺仪和温度数据来进行进一步的应用。
MPU6050_GetData 函数
这个函数用于从 MPU6050 获取加速度计、陀螺仪和温度的数据。通过传入的指针,将获取到的数据存储到相应的变量中。
void MPU6050_GetData(int16_t *AX, int16_t *AY, int16_t *AZ,
int16_t *GX, int16_t *GY, int16_t *GZ,
float *Temp)
{
// 读取加速度计数据(X轴、Y轴、Z轴)
*AX = (int16_t)((Read_Byte(MPU_ACCEL_XOUTH_REG, 0) << 8) | Read_Byte(MPU_ACCEL_XOUTL_REG, 0));
*AY = (int16_t)((Read_Byte(MPU_ACCEL_YOUTH_REG, 0) << 8) | Read_Byte(MPU_ACCEL_YOUTL_REG, 0));
*AZ = (int16_t)((Read_Byte(MPU_ACCEL_ZOUTH_REG, 0) << 8) | Read_Byte(MPU_ACCEL_ZOUTL_REG, 0));
// 读取陀螺仪数据(X轴、Y轴、Z轴)
*GX = (int16_t)((Read_Byte(MPU_GYRO_XOUTH_REG, 0) << 8) | Read_Byte(MPU_GYRO_XOUTL_REG, 0));
*GY = (int16_t)((Read_Byte(MPU_GYRO_YOUTH_REG, 0) << 8) | Read_Byte(MPU_GYRO_YOUTL_REG, 0));
*GZ = (int16_t)((Read_Byte(MPU_GYRO_ZOUTH_REG, 0) << 8) | Read_Byte(MPU_GYRO_ZOUTL_REG, 0));
// 读取温度数据
*Temp = (int16_t)((Read_Byte(MPU_TEMP_OUTH_REG, 0) << 8) | Read_Byte(MPU_TEMP_OUTL_REG, 0));
// 温度值转换公式,转换为实际的温度值(单位:摄氏度)
*Temp = *Temp / 340.0 + 36.53;
}
完整主函数示例
在这个主函数中,我们会初始化 IIC 总线、MPU6050,并持续读取传感器数据(加速度计、陀螺仪和温度)。读取到的数据将通过串口输出。
#include "stm32f10x.h"
#include "MPU6050.h" // 包含相关函数头文件
#include "IIC.h"
#include "usart.h"
int main(void)
{
// 系统初始化
SystemInit();
// 初始化 IIC
IIC_Init();
// 使能 MPU6050
MPU6050_Init();
// 初始化串口
USART_Init(9600);
// 存储读取到的数据
int16_t AX, AY, AZ, GX, GY, GZ;
float Temp;
// 主循环
while (1)
{
// 读取 MPU6050 数据
MPU6050_GetData(&AX, &AY, &AZ, &GX, &GY, &GZ, &Temp);
// 打印加速度计数据(AX, AY, AZ)
printf("AX: %d, AY: %d, AZ: %d\n", AX, AY, AZ);
// 打印陀螺仪数据(GX, GY, GZ)
printf("GX: %d, GY: %d, GZ: %d\n", GX, GY, GZ);
// 打印温度数据
printf("Temperature: %.2f °C\n", Temp);
}
}
结尾
通过本篇文章,我们详细介绍了如何使用 STM32 微控制器与 MPU6050 传感器进行通信,并实现了加速度计、陀螺仪和温度的实时读取。您已经学会了如何初始化 IIC 总线、如何与 MPU6050 进行数据交互,以及如何将数据通过串口输出。希望这些内容对您的项目有所帮助,并为后续更多传感器应用提供了一定的基础。
在实际应用中,您可以根据项目需求扩展该功能,例如通过 LCD 屏幕显示传感器数据,或与其他外设进行通信与控制。此外,MPU6050 作为一个常用的传感器,应用非常广泛,尤其是在运动控制、姿态检测等领域。
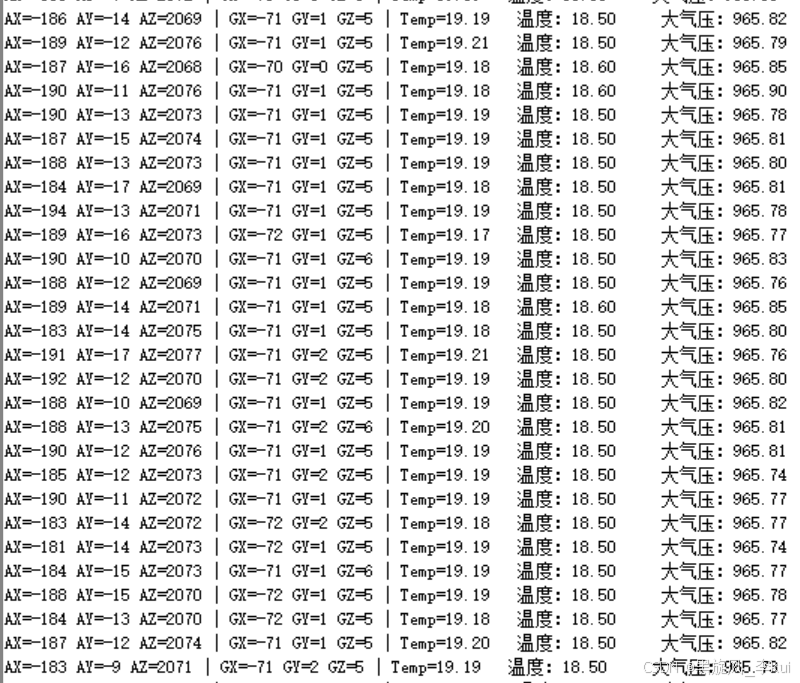
效果图示意
为了更直观地了解数据输出的效果,我们提供了以下示意图,展示了通过串口输出的加速度计、陀螺仪和温度数据。
需要源码私信作者

















 1810
1810

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









