







文章目录
最短路算法归纳
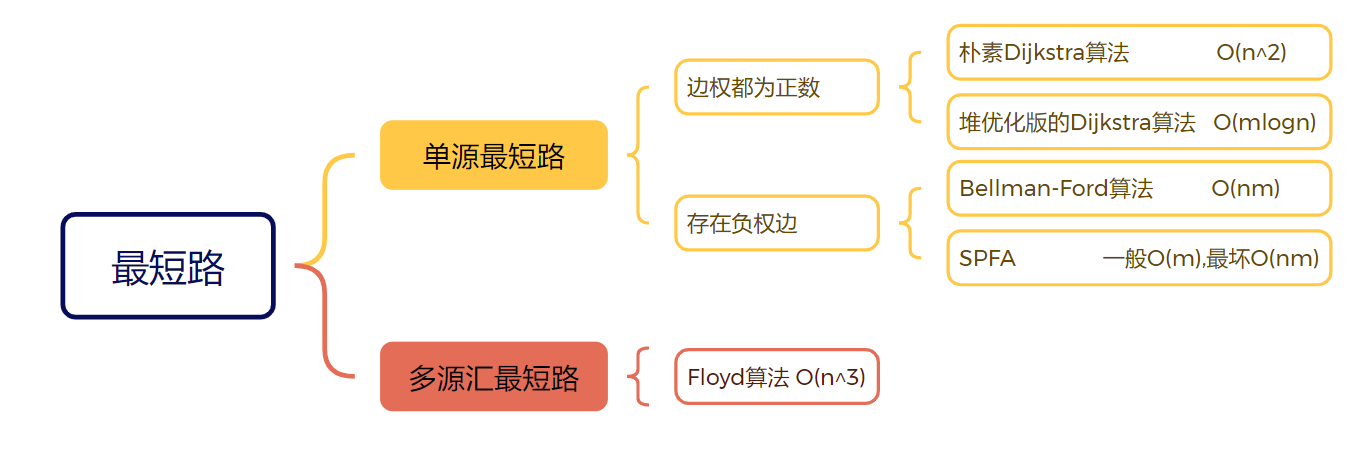
最短路问题:最短路问题是图论中的经典问题,旨在寻找从一个顶点到其他顶点的最短路径。
单源最短路:给定一个源点(起点),找到从该源点到图中其他所有顶点的最短路径。
多源汇最短路径:给定多个源点,寻找从这些源点到一个目标(汇点)的最短路径。
朴素Dijkstra算法
基本思想
- Dijkstra算法使用==“贪心”==的思想,即每次都选择当前距离最小的顶点进行扩展,确保从起点到这个顶点的最短路径已经确定。
- 然后,通过该顶点尝试更新其邻接点的距离。
- 重复这一过程,直到所有顶点的最短路径都得到确定。
算法步骤
-
初始化:
- 设置一个距离数组
dist[],其中dist[i]表示从起点到顶点i的当前最短路径长度。起点的距离设为0,其余所有顶点的距离初始化为∞(无穷大)。 - 设置一个已访问集合
S,初始时包含起点,表示这些顶点的最短路径已确定。
- 设置一个距离数组
-
从起点开始:
- 每次从未访问的顶点中选择一个距离当前最短的顶点
u,将其加入到集合S中。 - 对
u的所有邻接顶点v进行松弛操作(Relaxation),尝试通过u更新v的最短距离。如果dist[u] + weight(u, v) < dist[v],则更新dist[v]。
- 每次从未访问的顶点中选择一个距离当前最短的顶点
-
重复:
- 重复步骤2,直到所有顶点的最短路径都已确定。
C++实现
#include <iostream>
#include <cstring>
using namespace std;
// 常量定义:N为顶点最大数量
const int N = 510;
// g[N][N]表示邻接矩阵,存储两点之间的边权
int g[N][N];
// dist[N]表示从起点1到每个点的最短距离
int dist[N];
// st[N]是状态数组,st[i]为true表示节点i已经确定最短路径
bool st[N];
// n为顶点数量,m为边的数量
int n, m;
/**
* @brief Dijkstra算法,用于计算从节点1到节点n的最短路径
*
* @return 如果存在从节点1到节点n的路径,返回最短路径长度;否则返回-1表示无法到达。
*/
int dijkstra()
{
// 初始化dist数组,所有距离设置为一个非常大的值(无穷大)
memset(dist, 0x3f, sizeof dist);
// 起点1的距离初始化为0,因为从自己到自己的距离为0
dist[1] = 0;
// 遍历n-1次,每次确定一个顶点的最短路径
for (int i = 1; i < n; i++)
{
// t用于记录当前未确定最短路径顶点中距离最小的顶点
int t = -1;
// 在所有顶点中,找到未确定最短路径且距离最小的顶点
for (int j = 1; j <= n; j++)
{
// 如果节点j未被访问且距离小于当前已知最小距离,则更新t
if (!st[j] && (t == -1 || dist[j] < dist[t]))
t = j;
}
// 标记顶点t已经确定最短路径
st[t] = true;
// 松弛操作:尝试通过顶点t更新其他顶点的最短距离
for (int j = 1; j <= n; j++)
dist[j] = min(dist[j], dist[t] + g[t][j]);
}
// 如果从1号顶点到n号顶点的最短路径不是无穷大,则返回该距离,否则返回-1表示无法到达
return dist[n] != 0x3f3f3f3f ? dist[n] : -1;
}
int main()
{
cin >> n >> m;
// 初始化邻接矩阵,所有边的权值初始化为无穷大(表示两点之间不存在边)
memset(g, 0x3f, sizeof g);
for (int i = 0; i < m; i++)
{
int a, b, w;
cin >> a >> b >> w;
// 如果存在重边,则会读取最短的那条边
g[a][b] = min(g[a][b], w);
}
cout << dijkstra() << endl;
return 0;
}
堆优化版本的Dijkstra算法
基本思想
朴素版的Dijsktra算法适合稠密图,边的数量与算法时间复杂度无关,都为O(N^2)
那么如果是稀疏图呢(边的数量E远小于N^2)?则优先使用改进的Dijkstra算法。
在朴素版的Dijkstra算法中,在所有顶点中,找到未确定最短路径且距离最小的顶点的时间复杂度为O(N),那么我们可以通过优
化这一步骤来提高效率。
我们可以利用就要利用堆来获取距离最小的顶点,时间复杂度为O(1),而调整堆的时间复杂度为O(log(N))。
- 知识补充,C++优先队列的基本用法:
priority_queue<int, vector<int>, greater<int>> pq; // 使用std::greater<T>实现小根堆
priority_queue<int, vector<int>, less<int>> pq; // 使用std::greater<T>实现大根堆
C++实现
#include <iostream>
#include <queue>
#include <cstring>
using namespace std;
// 定义常量和类型
typedef pair<int, int> PII; // PII表示一对整数,first为距离,second为顶点编号
const int N = 150010; // N为最大顶点数量
// 图的邻接表结构
int h[N], e[N], ne[N], w[N], idx; // h[N]存储头结点,e[N]存储边的目标顶点,ne[N]存储下一条边的索引,w[N]存储边的权重
int dist[N]; // dist[N]存储从起点到各点的最短距离
bool st[N]; // st[N]标记顶点是否已确定最短路径
int n, m; // n为顶点数量,m为边的数量
/**
* @brief 添加一条边到邻接表中
* @param a 边的起点
* @param b 边的终点
* @param c 边的权重
*/
void add(int a, int b, int c)
{
e[idx] = b; // 记录目标顶点
ne[idx] = h[a]; // 记录当前顶点的下一条边
w[idx] = c; // 记录边的权重
h[a] = idx++; // 更新顶点的头指针
}
/**
* @brief Dijkstra算法,计算从起点1到终点n的最短路径
* @return 返回最短路径长度,如果无路径则返回-1
*/
int Dijkstra()
{
// 初始化dist数组,设置所有点到起点的距离为一个非常大的值(0x3f3f3f3f相当于无穷大)
memset(dist, 0x3f, sizeof dist);
// 起点1的距离初始化为0
dist[1] = 0;
// 定义优先队列,使用最小堆(greater<PII>)以确保每次取出的是最小距离的顶点
priority_queue<PII, vector<PII>, greater<PII>> queue;
// 将起点1推入优先队列,起点距离为0
queue.push({0, 1});
// 开始处理队列
while (!queue.empty())
{
// 取出距离最小的顶点(当前优先队列中的堆顶元素)
auto t = queue.top();
queue.pop();
int distance = t.first; // 顶点t的当前距离
int id = t.second; // 顶点编号
// 如果该顶点已经处理过,跳过
if (st[id])
continue;
// 标记该顶点已确定最短路径
st[id] = true;
// 遍历与当前顶点相连的所有边
for (int i = h[id]; i != -1; i = ne[i])
{
int j = e[i]; // 边的终点
// 松弛操作:如果通过当前顶点可以使邻接顶点j的距离更短,则更新
if (dist[j] > distance + w[i]) {
dist[j] = distance + w[i]; // 更新顶点j的最短距离
queue.push({dist[j], j}); // 将更新后的顶点推入优先队列
}
}
}
// 如果终点n的最短路径不是无穷大,返回该路径,否则返回-1表示无路径
return dist[n] != 0x3f3f3f3f ? dist[n] : -1;
}
int main()
{
// 初始化邻接表,所有顶点的头指针初始为-1(表示没有边)
memset(h, -1, sizeof h);
// 读取顶点数和边数
cin >> n >> m;
// 逐条读取边的信息,并将其添加到邻接表中
while (m--)
{
int a, b, c;
cin >> a >> b >> c;
add(a, b, c); // 将边(a, b, c)添加到邻接表
}
cout << Dijkstra() << endl;
return 0;
}
Bellman-Ford算法
基本思想
Bellman-Ford算法与Dijkstra算法相似,都是从一个起始点开始,逐步寻找到所有其他点的最短路径。
与Dijkstra不同的是,它可以处理带有负权边的图。其核心思想是对所有边进行多次松弛(Relaxation),逐步缩短每个顶点的最短路径估计值。
特性
- 能够处理负权边,这是区别于Dijkstra的关键点
- 能够检测负环:如果在
n-1次松弛操作后,还能进一步松弛边,则说明图中存在负权环。
算法步骤
-
初始化:
- 设置一个距离数组
dist[],其中dist[i]表示从起点到顶点i的当前最短路径长度。起点的距离设为0,其余所有顶点的距离初始化为∞(无穷大)。 - 设置一个已访问集合
S,初始时包含起点,表示这些顶点的最短路径已确定。
- 设置一个距离数组
-
松弛操作:
- 遍历n次,都需要对上一次的距离信息进行备份,然后遍历所有边。
- 对于每条边
(u, v),如果dist[v] > dist[u] + w(u, v),则更新dist[v]。
为什么要进行备份?
备份机制确保每一轮松弛时,所有的更新操作是基于上一轮的结果,而不是当前已经被更新的值。
这样可以保证每一轮松弛时,所有边的松弛操作都是在同一轮次内完成的,避免出现松弛操作相互影响的情况。
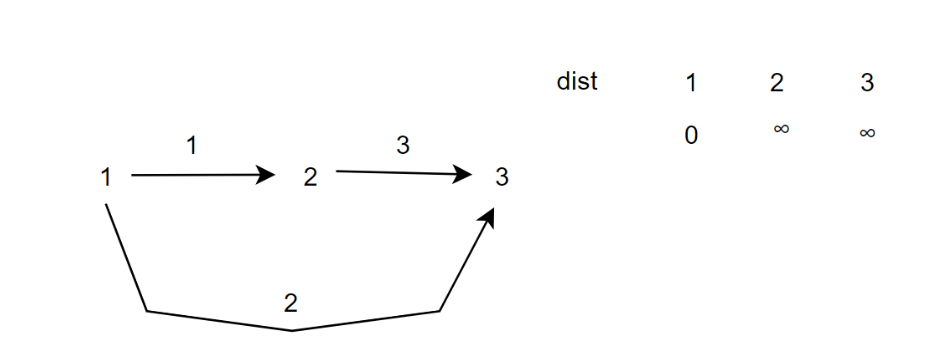
假设有现在这种情况(无备份模式),dist数组分别是0,∞,∞
在第一次松弛操作时,当遍历前两条边时会出现下面的情况
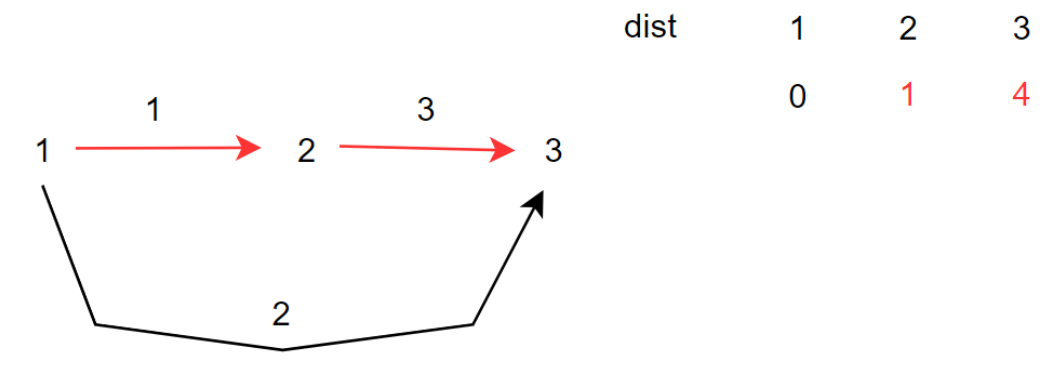
1–>3 出现了一条边数为2的路线,而在此算法中,第k次松弛操作意味着可以从某一起点和终点找到一条不大于k条边的路线。
故需要备份操作。
C++实现
#include <iostream>
#include <cstring>
using namespace std;
const int N = 510, M = 100010; // 定义最大节点数N和最大边数M
int dist[N], backup[N]; // dist数组存储源点到各个节点的最短距离,backup用于保存上一次的距离信息
bool st[N]; // 标记数组,用于判断节点是否在队列中,虽然这里没有用到
int n, m, k; // n表示节点数量,m表示边数,k表示最多进行k次松弛操作
// 边的结构体,表示有向边u->v,权值为w
struct Edge{
int u;
int v;
int w;
} Edges[M]; // 定义边的数组,存储图中的所有边
// Bellman-Ford算法实现
void bellman_ford()
{
memset(dist, 0x3f, sizeof dist); // 初始化dist数组,设置为正无穷,0x3f3f3f3f是较大的整数(近似于无穷大)
dist[1] = 0; // 设置源点到自身的距离为0,假设源点为1
// 进行k次松弛操作,每次更新所有边
for(int i = 0; i < k; i++)
{
memcpy(backup, dist, sizeof dist); // 将当前的dist数组复制到backup中,便于后续的松弛操作
// 遍历所有边,进行松弛操作
for(int j = 0; j < m; j++){
int u = Edges[j].u;
int v = Edges[j].v;
int w = Edges[j].w;
// 松弛操作,如果从u到v的路径经过u再加上权值w比当前到v的路径更短,则更新v的距离
dist[v] = min(dist[v], backup[u] + w);
}
}
// 如果经过k次松弛后,目标节点的距离仍然是无穷大,说明无法到达
if(dist[n] > 0x3f3f3f3f / 2) printf("impossible\n");
else cout << dist[n] << endl; // 否则输出从源点到目标节点n的最短距离
}
int main()
{
cin >> n >> m >> k; // 输入节点数n,边数m,松弛次数k
// 输入每条边的信息,存入Edges数组
for(int i = 0; i < m; i++)
{
int u, v, w;
cin >> u >> v >> w;
Edges[i] = {u, v, w}; // 存储边u->v,权值为w
}
bellman_ford(); // 调用Bellman-Ford算法计算最短路径
return 0; // 程序结束
}
SPFA
-
SPFA 算法的核心思想是松弛操作的队列优化。
-
它并不需要像 Bellman-Ford 那样每次都松弛所有的边,而是将那些有可能继续松弛的节点放入队列中,进行有选择性的松弛。这样可以避免对不必要的节点进行多余的计算,大大加快算法的速度。
在Bellman-Ford算法中,松弛操作的关键操作是dist[v] = min(dist[v], backup[u] + w);
大白话来讲就是:如果某一个节点的距离数组变小了,那么就需要将他放进队列里,与它关联的边进行松弛操作。边关联的节点接着放进队列。
算法步骤
SPFA 算法的基本流程:
- 初始化:将源点的最短路径设置为 0,其他节点的最短路径设置为正无穷。
- 队列操作:将源点入队列,开始松弛过程。
- 松弛操作:
- 每次从队列中取出一个节点,检查它的所有相邻节点。
- 如果通过该节点可以更新相邻节点的最短路径,则更新,并将该相邻节点加入队列(如果它不在队列中)。
- 循环处理:重复上述过程,直到队列为空,意味着所有可能的最短路径都已经被处理过。
C++实现
#include <iostream>
#include <cstring>
#include <queue>
using namespace std;
const int N = 100010; // 定义常量N,表示最大节点数
int dist[N]; // 存储源点到各节点的最短距离
int h[N], e[N], ne[N], w[N], idx; // 邻接表相关数组:h是每个点的头节点索引,e存储边的终点,ne存储下一条边的索引,w存储边权,idx是边的计数器
bool st[N]; // 标记数组,判断每个节点是否在队列中
int n, m; // n是节点数,m是边数
// SPFA算法
void spfa()
{
memset(dist, 0x3f, sizeof dist); // 初始化最短距离数组,将所有节点的距离设为无穷大
queue<int> que; // 定义队列,用于存储需要松弛的节点
dist[1] = 0; // 设置源点(假设为1)的最短距离为0
que.push(1); // 将源点入队
st[1] = true; // 标记源点在队列中
while (!que.empty()) { // 当队列不为空时,继续松弛操作
auto t = que.front(); // 取出队首节点
que.pop(); // 将该节点出队
st[t] = false; // 标记该节点已经出队
// 遍历节点 t 的所有邻接边,进行松弛操作
for (int i = h[t]; i != -1; i = ne[i]) { // 遍历邻接表,通过ne[i]找到下一个邻接节点
int v = e[i]; // 获取边的终点v
if (dist[v] > dist[t] + w[i]) { // 松弛操作:检查通过t到v的路径是否更短
dist[v] = dist[t] + w[i]; // 如果更短,则更新dist[v]
if (!st[v]) { // 如果v不在队列中,则将其加入队列
que.push(v);
st[v] = true; // 标记v已经入队
}
}
}
}
// 判断源点到节点n是否可达,若不可达输出"impossible",否则输出最短路径
if (dist[n] > 0x3f3f3f3f / 2) cout << "impossible" << endl;
else cout << dist[n] << endl;
}
int main()
{
cin >> n >> m; // 输入节点数n和边数m
memset(h, -1, sizeof h); // 初始化邻接表的头节点数组h,-1表示该节点没有任何边
// 输入每条边的起点、终点和权值
for (int i = 0; i < m; i++) {
int a, b, c;
cin >> a >> b >> c;
e[idx] = b; // 将b存入e数组,表示边a -> b
w[idx] = c; // 将边权c存入w数组
ne[idx] = h[a]; // 将当前边的下一个边设为节点a当前的第一条边
h[a] = idx++; // 更新节点a的头节点索引,并增加边的计数器
}
spfa(); // 调用SPFA算法计算最短路径
return 0;
}
Floyd算法
基本思想
Floyd-Warshall算法使用动态规划的思想,逐步更新顶点间的最短路径。它的主要步骤是:对于图中的每一对顶点(i, j),通过所有可能的中间顶点k来尝试更新它们之间的最短路径。具体来说,如果通过顶点k能够让i到j的路径更短,则更新它们的最短路径。
C++实现
#include <iostream>
#include <cstring>
using namespace std;
const int N = 210;
int g[N][N];
int n, m, k;
void floyd()
{
for(int k = 1; k <=n; k++)
{
for(int i = 1; i <= n; i++)
{
for(int j = 1; j <= n; j++)
{
g[i][j] = min(g[i][j], g[i][k] + g[k][j]);
}
}
}
}
int main()
{
cin >> n >> m >> k;
for(int i = 1; i<=n; i++)
for(int j = 1; j <= n; j++){
if(i == j)
g[i][j] = 0;
else
g[i][j] = 0x3f3f3f3f;
}
while(m--)
{
int a, b, c;
cin >> a >> b >> c;
g[a][b] = min(g[a][b], c);
}
floyd();
while(k--)
{
int x, y;
cin >> x >> y;
if(g[x][y] > 0x3f3f3f3f / 2) cout <<"impossible" << endl;
else cout << g[x][y] << endl;
}
return 0;
}
= 1; i<=n; i++)
for(int j = 1; j <= n; j++){
if(i == j)
g[i][j] = 0;
else
g[i][j] = 0x3f3f3f3f;
}
while(m--)
{
int a, b, c;
cin >> a >> b >> c;
g[a][b] = min(g[a][b], c);
}
floyd();
while(k--)
{
int x, y;
cin >> x >> y;
if(g[x][y] > 0x3f3f3f3f / 2) cout <<"impossible" << endl;
else cout << g[x][y] << endl;
}
return 0;
}















 438
438

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









