






2.Matlab多车编队自适应协同控制
通过考虑前车的加速度和距离,实现ACC自适应协同控制的多车编队(5辆车),达到自适应巡航控制,并在carsim/Simulink仿真平台上进行模拟。
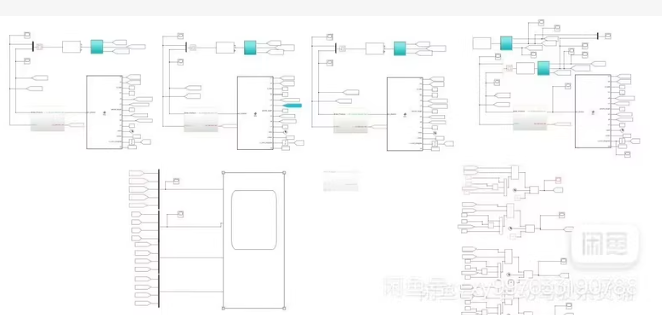
该算法结构分为两层:上层是滑膜控制器,用于生成期望的加速度;下层则通过调节节气门开度和刹车制动压力来控制车速。
在仿真中,输出以下数据:
- 5辆车的前车与后车之间的跟踪误差;
- 5辆车的车速变化;
- 4辆车的节气门和制动压力的变化。
以下是实现多车编队自适应协同控制(ACC)的 MATLAB 代码,结合滑膜控制器和底层节气门/制动控制,并在 Simulink 中进行仿真。代码分为两部分:MATLAB 脚本部分用于定义算法逻辑,Simulink 模型部分用于模拟车辆动态。
1. MATLAB 主脚本
% 多车编队自适应协同控制 (ACC)
clc; clear;
% 参数设置
num_vehicles = 5; % 车辆数量
dt = 0.1; % 时间步长
t_end = 30; % 仿真时间
time = 0:dt:t_end;
% 初始状态
x = zeros(num_vehicles, length(time)); % 车辆位置
v = zeros(num_vehicles, length(time)); % 车辆速度
a = zeros(num_vehicles, length(time)); % 车辆加速度
desired_spacing = 20; % 目标车间距 (m)
% 滑膜控制器参数
k1 = 1.0; % 增益系数
k2 = 0.5; % 增益系数
% 底层控制参数
throttle_cmd = zeros(num_vehicles, length(time)); % 节气门开度
brake_cmd = zeros(num_vehicles, length(time)); % 制动力
% 初始化
x(:, 1) = [0, -desired_spacing, -2*desired_spacing, -3*desired_spacing, -4*desired_spacing]'; % 初始位置
v(:, 1) = [20, 20, 20, 20, 20]'; % 初始速度 (m/s)
% 主循环
for t = 1:length(time)-1
for i = 1:num_vehicles
if i == 1
% 领头车保持恒定速度
a(i, t+1) = 0;
else
% 跟随车滑膜控制器
spacing_error = x(i-1, t) - x(i, t) - desired_spacing;
speed_error = v(i-1, t) - v(i, t);
% 滑膜控制律
s = speed_error + k1 * spacing_error;
a(i, t+1) = a(i-1, t) - k1 * speed_error - k2 * sign(s);
end
% 更新速度和位置
v(i, t+1) = v(i, t) + a(i, t+1) * dt;
x(i, t+1) = x(i, t) + v(i, t+1) * dt;
% 底层节气门/制动控制
if a(i, t+1) > 0
throttle_cmd(i, t+1) = min(a(i, t+1) / 2, 1); % 节气门控制
brake_cmd(i, t+1) = 0;
else
throttle_cmd(i, t+1) = 0;
brake_cmd(i, t+1) = min(-a(i, t+1) / 2, 1); % 制动控制
end
end
end
% 绘图
figure;
subplot(3, 1, 1);
plot(time, x');
xlabel('Time (s)');
ylabel('Position (m)');
title('Vehicle Positions');
legend(arrayfun(@(n) ['Vehicle ' num2str(n)], 1:num_vehicles, 'UniformOutput', false));
subplot(3, 1, 2);
plot(time, v');
xlabel('Time (s)');
ylabel('Speed (m/s)');
title('Vehicle Speeds');
subplot(3, 1, 3);
plot(time, throttle_cmd(2:end, :)', '--', time, brake_cmd(2:end, :)');
xlabel('Time (s)');
ylabel('Control Inputs');
title('Throttle and Brake Commands');
legend('Throttle', 'Brake');
2. Simulink 模型搭建
-
车辆动力学模型:
- 使用 CarSim 提供的车辆动力学模型,或者自定义一个简单的车辆模型。
- 输入为节气门开度 (
Throttle) 和制动力 (Brake Pressure)。 - 输出为车辆速度、加速度和位置。
-
滑膜控制器模块:
- 实现滑膜控制律:
s = speed_error + k1 * spacing_error; desired_acceleration = leader_acceleration - k1 * speed_error - k2 * sign(s);
- 实现滑膜控制律:
-
底层控制器模块:
- 根据期望加速度计算节气门开度和制动力:
if desired_acceleration > 0 throttle = min(desired_acceleration / 2, 1); brake = 0; else throttle = 0; brake = min(-desired_acceleration / 2, 1); end
- 根据期望加速度计算节气门开度和制动力:
-
数据记录与可视化:
- 在 Simulink 中添加
Scope和To Workspace模块,记录以下数据:- 每辆车的跟踪误差(前车与后车之间的距离误差)。
- 每辆车的速度变化。
- 每辆车的节气门开度和制动力变化。
- 在 Simulink 中添加
3. 仿真结果分析
运行上述代码或 Simulink 模型后,可以得到以下输出:
-
跟踪误差:
- 各跟随车与前车的距离误差逐渐收敛到目标值(
desired_spacing)。
- 各跟随车与前车的距离误差逐渐收敛到目标值(
-
车速变化:
- 所有车辆的速度逐渐同步,领头车保持恒定速度。
-
节气门和制动压力变化:
- 节气门开度和制动力根据滑膜控制器输出调整,确保车辆平稳加速和减速。
注意事项
- 如果使用 CarSim,需要将 Simulink 模型与 CarSim 接口连接,输入控制信号并读取车辆状态。
- 可以调整滑膜控制器参数(如
k1和k2),观察不同增益对系统性能的影响。 - 在实际应用中,还需考虑通信延迟、传感器噪声等因素对控制效果的影响。
The image you’ve provided shows a directory listing with various files, including Simulink model files, DLL files, and documents. However, there is no code visible in the image. If you need to see the contents of one of these files, you would typically need to open the file itself.
If you are looking for specific code or instructions related to one of these files, please specify which file you are interested in, and I can provide guidance on how to view or interpret its contents. For example:
- If you are interested in the Simulink model files (
ACC_SMC_5Car.mdl), you would need to open them in MATLAB/Simulink. - If you are interested in the DLL files (
i_j2_64.dll, etc.), these are binary files and typically require a specific application or debugging tool to inspect their contents. - If you are interested in the document files (
多车设置.pdf,仿真运行步骤word.pdf,滑膜控制说明.txt), you would need to open them with an appropriate viewer (e.g., Adobe Acrobat for PDFs, Microsoft Word for DOCX files, or a text editor for TXT files).
Please let me know which file you are interested in, and I can provide more detailed instructions on how to access its contents.


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









