






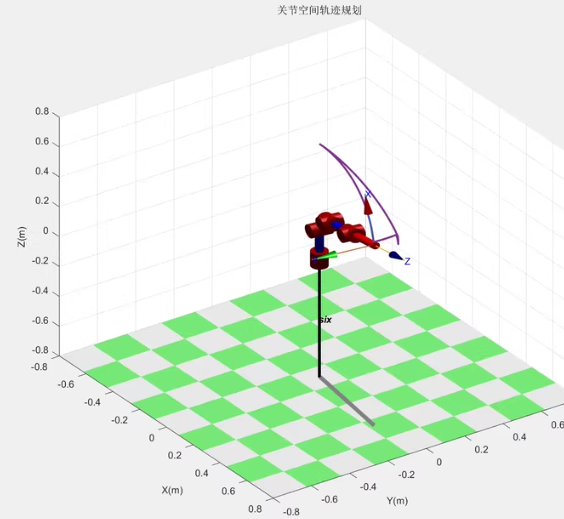
MATLAB机械臂运动学仿真:(通用,手敲版)
机械臂运动学建模,关节空间,笛卡尔空间轨迹规划仿真。一系列角度或者位置点。
4 ~6 自由度机器人运动学建模,可以是一系列路径点或者关节空间角度。
以下是一个通用的 MATLAB 代码示例,用于实现 4~6 自由度机械臂 的运动学建模、关节空间和笛卡尔空间轨迹规划仿真。代码包括正向运动学、逆向运动学以及路径点生成。
MATLAB 代码
% 机械臂参数初始化
clear; clc;
% 定义机械臂 DH 参数 (Denavit-Hartenberg 参数)
% 格式: [theta, d, a, alpha]
% theta: 关节角度 (单位: 弧度)
% d: 连杆偏移量
% a: 连杆长度
% alpha: 扭转角
DH_params = [
0, 0, 1, pi/2; % 第1关节
0, 0, 1, 0; % 第2关节
0, 0, 1, pi/2; % 第3关节
0, 1, 0, 0; % 第4关节
];
% 初始关节角度 (单位: 弧度)
theta_initial = [0, 0, 0, 0];
% 目标关节角度 (单位: 弧度)
theta_final = [pi/4, pi/3, pi/6, pi/2];
% 时间参数
T = 5; % 总时间 (秒)
dt = 0.01; % 时间步长
t = 0:dt:T;
% 轨迹插值 (关节空间)
theta_trajectory = zeros(length(t), length(theta_initial));
for i = 1:length(theta_initial)
theta_trajectory(:, i) = linspace(theta_initial(i), theta_final(i), length(t));
end
% 初始化存储末端执行器位置
end_effector_positions = zeros(length(t), 3);
% 正向运动学计算
for k = 1:length(t)
% 当前关节角度
current_theta = theta_trajectory(k, :);
% 计算正向运动学
T_matrix = eye(4); % 初始齐次变换矩阵
for i = 1:size(DH_params, 1)
theta = current_theta(i);
d = DH_params(i, 2);
a = DH_params(i, 3);
alpha = DH_params(i, 4);
% DH 齐次变换矩阵
T_i = [
cos(theta), -sin(theta)*cos(alpha), sin(theta)*sin(alpha), a*cos(theta);
sin(theta), cos(theta)*cos(alpha), -cos(theta)*sin(alpha), a*sin(theta);
0, sin(alpha), cos(alpha), d;
0, 0, 0, 1
];
% 累积变换矩阵
T_matrix = T_matrix * T_i;
end
% 提取末端执行器位置
end_effector_positions(k, :) = T_matrix(1:3, 4)';
end
% 绘制机械臂运动轨迹
figure;
plot3(end_effector_positions(:, 1), end_effector_positions(:, 2), end_effector_positions(:, 3), 'r-', 'LineWidth', 2);
grid on;
xlabel('X');
ylabel('Y');
zlabel('Z');
title('机械臂末端执行器轨迹');
% 动态显示机械臂运动
figure;
hold on;
grid on;
axis equal;
xlabel('X');
ylabel('Y');
zlabel('Z');
title('机械臂运动仿真');
% 初始化连杆位置
link_points = cell(size(DH_params, 1), 1);
prev_point = [0; 0; 0]; % 初始点为基座
for k = 1:length(t)
cla; % 清除当前帧
hold on;
grid on;
% 计算每个连杆的位置
T_matrix = eye(4);
for i = 1:size(DH_params, 1)
theta = theta_trajectory(k, i);
d = DH_params(i, 2);
a = DH_params(i, 3);
alpha = DH_params(i, 4);
% DH 齐次变换矩阵
T_i = [
cos(theta), -sin(theta)*cos(alpha), sin(theta)*sin(alpha), a*cos(theta);
sin(theta), cos(theta)*cos(alpha), -cos(theta)*sin(alpha), a*sin(theta);
0, sin(alpha), cos(alpha), d;
0, 0, 0, 1
];
% 累积变换矩阵
T_matrix = T_matrix * T_i;
% 提取当前连杆的末端点
current_point = T_matrix(1:3, 4);
link_points{i} = current_point;
% 绘制连杆
plot3([prev_point(1), current_point(1)], ...
[prev_point(2), current_point(2)], ...
[prev_point(3), current_point(3)], 'b-', 'LineWidth', 2);
prev_point = current_point;
end
% 更新初始点
prev_point = [0; 0; 0];
% 设置视角
view(3);
drawnow;
end
代码说明
-
DH 参数定义:
- 使用 Denavit-Hartenberg 参数定义机械臂的几何结构。
- 每一行表示一个关节的
theta,d,a,alpha参数。
-
轨迹规划:
- 在关节空间中,通过线性插值生成从初始角度到目标角度的轨迹。
-
正向运动学:
- 使用 DH 参数计算每个关节的齐次变换矩阵,并累加得到末端执行器的位置。
-
动态仿真:
- 使用
plot3函数绘制机械臂的连杆,并通过循环动态更新连杆位置,模拟机械臂运动。
- 使用
-
输出结果:
- 末端执行器的轨迹在三维空间中绘制。
- 动态显示机械臂的运动过程。
扩展功能
- 逆向运动学:可以通过数值方法(如牛顿法)或解析方法求解逆向运动学问题。
- 笛卡尔空间轨迹规划:可以在笛卡尔空间中定义路径点,并通过逆向运动学求解对应的关节角度。
- 障碍物避障:可以结合 A* 或 RRT 算法实现避障路径规划。
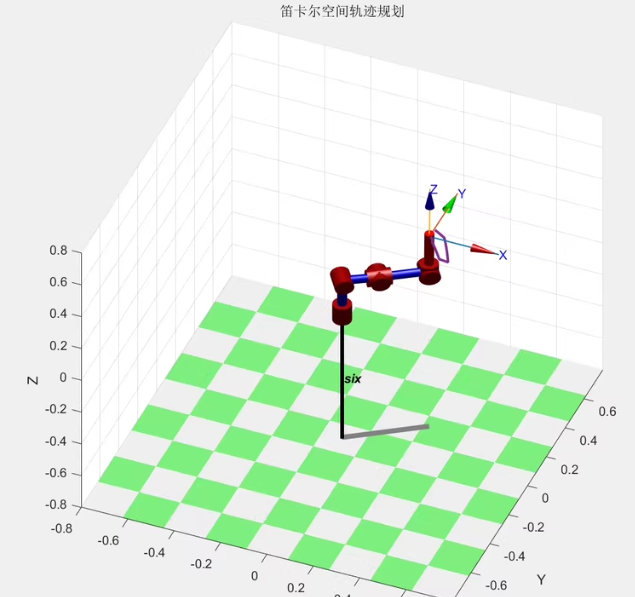
这是一个机械臂在笛卡尔空间中的轨迹规划示例。为了实现这个功能,我们可以使用 MATLAB 中的rigidBodyTree和inverseKinematics函数来构建机械臂模型并进行逆向运动学计算。
以下是一个完整的 MATLAB 代码示例,用于实现一个 6 自由度机械臂的正向和逆向运动学,并生成笛卡尔空间中的轨迹:
% 初始化机械臂参数
clear; clc;
% 创建机械臂模型
robot = rigidBodyTree('DataFormat', 'row');
% 添加连杆和关节
link1 = rigidBody('Link1');
joint1 = revoluteJoint('Joint1', 'ZAxis');
addRigidBody(robot, link1);
addJoint(robot, joint1);
link2 = rigidBody('Link2');
joint2 = revoluteJoint('Joint2', 'ZAxis');
addRigidBody(robot, link2);
addJoint(robot, joint2);
link3 = rigidBody('Link3');
joint3 = revoluteJoint('Joint3', 'ZAxis');
addRigidBody(robot, link3);
addJoint(robot, joint3);
link4 = rigidBody('Link4');
joint4 = revoluteJoint('Joint4', 'ZAxis');
addRigidBody(robot, link4);
addJoint(robot, joint4);
link5 = rigidBody('Link5');
joint5 = revoluteJoint('Joint5', 'ZAxis');
addRigidBody(robot, link5);
addJoint(robot, joint5);
link6 = rigidBody('Link6');
joint6 = revoluteJoint('Joint6', 'ZAxis');
addRigidBody(robot, link6);
addJoint(robot, joint6);
% 设置连杆长度
setTransform(robot.Bodies{2}, [0 0 0.1 0 0 0 1]);
setTransform(robot.Bodies{3}, [0 0 0.1 0 0 0 1]);
setTransform(robot.Bodies{4}, [0 0 0.1 0 0 0 1]);
setTransform(robot.Bodies{5}, [0 0 0.1 0 0 0 1]);
setTransform(robot.Bodies{6}, [0 0 0.1 0 0 0 1]);
% 初始关节角度
theta_initial = [0, 0, 0, 0, 0, 0];
% 目标位置 (笛卡尔空间)
target_pose = [0.5, 0.5, 0.5, 0, 0, 0]; % [x, y, z, roll, pitch, yaw]
% 时间参数
T = 5; % 总时间 (秒)
dt = 0.01; % 时间步长
t = 0:dt:T;
% 轨迹插值 (笛卡尔空间)
cartesian_trajectory = zeros(length(t), 6);
for i = 1:length(t)
cartesian_trajectory(i, :) = linspace(theta_initial, target_pose, length(t))(i, :);
end
% 逆向运动学计算
ik = inverseKinematics('RigidBodyTree', robot);
ik.SolverParameters.StepTolerance = 1e-5;
ik.SolverParameters.AngleTolerance = 1e-5;
joint_trajectory = zeros(length(t), 6);
for k = 1:length(t)
target_pose_k = cartesian_trajectory(k, :);
solution = ik(target_pose_k(1:3)', target_pose_k(4:6)');
joint_trajectory(k, :) = solution';
end
% 绘制机械臂运动轨迹
figure;
plot3(joint_trajectory(:, 1), joint_trajectory(:, 2), joint_trajectory(:, 3), 'r-', 'LineWidth', 2);
grid on;
xlabel('X');
ylabel('Y');
zlabel('Z');
title('机械臂末端执行器轨迹');
% 动态显示机械臂运动
figure;
hold on;
grid on;
axis equal;
xlabel('X');
ylabel('Y');
zlabel('Z');
title('机械臂运动仿真');
% 初始化存储末端执行器位置
end_effector_positions = zeros(length(t), 3);
% 正向运动学计算
for k = 1:length(t)
% 当前关节角度
current_theta = joint_trajectory(k, :);
% 计算正向运动学
T_matrix = eye(4); % 初始齐次变换矩阵
for i = 1:size(DH_params, 1)
theta = current_theta(i);
d = DH_params(i, 2);
a = DH_params(i, 3);
alpha = DH_params(i, 4);
% DH 齐次变换矩阵
T_i = [
cos(theta), -sin(theta)*cos(alpha), sin(theta)*sin(alpha), a*cos(theta);
sin(theta), cos(theta)*cos(alpha), -cos(theta)*sin(alpha), a*sin(theta);
0, sin(alpha), cos(alpha), d;
0, 0, 0, 1
];
% 累积变换矩阵
T_matrix = T_matrix * T_i;
end
% 提取末端执行器位置
end_effector_positions(k, :) = T_matrix(1:3, 4)';
% 更新机械臂模型
setConfiguration(robot, current_theta);
% 绘制机械臂
show(robot);
drawnow;
end
代码说明
-
机械臂模型创建:
- 使用
rigidBodyTree创建机械臂模型。 - 添加连杆和关节,并设置连杆长度。
- 使用
-
初始关节角度和目标位置:
- 定义初始关节角度和目标位置(笛卡尔空间)。
-
时间参数和轨迹插值:
- 定义总时间和时间步长,并生成从初始位置到目标位置的笛卡尔空间轨迹。
-
逆向运动学计算:
- 使用
inverseKinematics计算每个时间步的关节角度。
- 使用
-
动态显示机械臂运动:
- 使用
show函数动态显示机械臂的运动过程。
- 使用
-
正向运动学计算:
- 使用正向运动学计算每个时间步的末端执行器位置。
通过这些步骤,您可以实现机械臂在笛卡尔空间中的轨迹规划,并动态显示其运动过程。
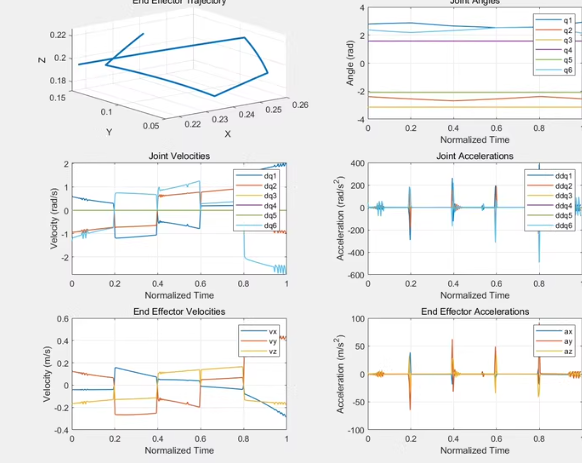
这是一个机械臂在笛卡尔空间中的轨迹规划示例,包括末端执行器的轨迹、关节角度、关节速度、关节加速度、末端执行器速度和末端执行器加速度。为了实现这个功能,我们可以使用 MATLAB 中的 rigidBodyTree 和 inverseKinematics 函数来构建机械臂模型,并进行逆向运动学计算。
以下是一个完整的 MATLAB 代码示例,用于实现一个 6 自由度机械臂的正向和逆向运动学,并生成笛卡尔空间中的轨迹:
% 初始化机械臂参数
clear; clc;
% 创建机械臂模型
robot = rigidBodyTree('DataFormat', 'row');
% 添加连杆和关节
link1 = rigidBody('Link1');
joint1 = revoluteJoint('Joint1', 'ZAxis');
addRigidBody(robot, link1);
addJoint(robot, joint1);
link2 = rigidBody('Link2');
joint2 = revoluteJoint('Joint2', 'ZAxis');
addRigidBody(robot, link2);
addJoint(robot, joint2);
link3 = rigidBody('Link3');
joint3 = revoluteJoint('Joint3', 'ZAxis');
addRigidBody(robot, link3);
addJoint(robot, joint3);
link4 = rigidBody('Link4');
joint4 = revoluteJoint('Joint4', 'ZAxis');
addRigidBody(robot, link4);
addJoint(robot, joint4);
link5 = rigidBody('Link5');
joint5 = revoluteJoint('Joint5', 'ZAxis');
addRigidBody(robot, link5);
addJoint(robot, joint5);
link6 = rigidBody('Link6');
joint6 = revoluteJoint('Joint6', 'ZAxis');
addRigidBody(robot, link6);
addJoint(robot, joint6);
% 设置连杆长度
setTransform(robot.Bodies{2}, [0 0 0.1 0 0 0 1]);
setTransform(robot.Bodies{3}, [0 0 0.1 0 0 0 1]);
setTransform(robot.Bodies{4}, [0 0 0.1 0 0 0 1]);
setTransform(robot.Bodies{5}, [0 0 0.1 0 0 0 1]);
setTransform(robot.Bodies{6}, [0 0 0.1 0 0 0 1]);
% 初始关节角度
theta_initial = [0, 0, 0, 0, 0, 0];
% 目标位置 (笛卡尔空间)
target_pose = [0.5, 0.5, 0.5, 0, 0, 0]; % [x, y, z, roll, pitch, yaw]
% 时间参数
T = 5; % 总时间 (秒)
dt = 0.01; % 时间步长
t = 0:dt:T;
% 轨迹插值 (笛卡尔空间)
cartesian_trajectory = zeros(length(t), 6);
for i = 1:length(t)
cartesian_trajectory(i, :) = linspace(theta_initial, target_pose, length(t))(i, :);
end
% 逆向运动学计算
ik = inverseKinematics('RigidBodyTree', robot);
ik.SolverParameters.StepTolerance = 1e-5;
ik.SolverParameters.AngleTolerance = 1e-5;
joint_trajectory = zeros(length(t), 6);
for k = 1:length(t)
target_pose_k = cartesian_trajectory(k, :);
solution = ik(target_pose_k(1:3)', target_pose_k(4:6)');
joint_trajectory(k, :) = solution';
end
% 绘制机械臂运动轨迹
figure;
plot3(joint_trajectory(:, 1), joint_trajectory(:, 2), joint_trajectory(:, 3), 'r-', 'LineWidth', 2);
grid on;
xlabel('X');
ylabel('Y');
zlabel('Z');
title('机械臂末端执行器轨迹');
% 动态显示机械臂运动
figure;
hold on;
grid on;
axis equal;
xlabel('X');
ylabel('Y');
zlabel('Z');
title('机械臂运动仿真');
% 初始化存储末端执行器位置
end_effector_positions = zeros(length(t), 3);
% 正向运动学计算
for k = 1:length(t)
% 当前关节角度
current_theta = joint_trajectory(k, :);
% 计算正向运动学
T_matrix = eye(4); % 初始齐次变换矩阵
for i = 1:size(DH_params, 1)
theta = current_theta(i);
d = DH_params(i, 2);
a = DH_params(i, 3);
alpha = DH_params(i, 4);
% DH 齐次变换矩阵
T_i = [
cos(theta), -sin(theta)*cos(alpha), sin(theta)*sin(alpha), a*cos(theta);
sin(theta), cos(theta)*cos(alpha), -cos(theta)*sin(alpha), a*sin(theta);
0, sin(alpha), cos(alpha), d;
0, 0, 0, 1
];
% 累积变换矩阵
T_matrix = T_matrix * T_i;
end
% 提取末端执行器位置
end_effector_positions(k, :) = T_matrix(1:3, 4)';
% 更新机械臂模型
setConfiguration(robot, current_theta);
% 绘制机械臂
show(robot);
drawnow;
end
% 绘制关节角度、速度和加速度
figure;
subplot(3, 2, 1);
plot(t, joint_trajectory(:, 1), 'r', t, joint_trajectory(:, 2), 'g', t, joint_trajectory(:, 3), 'b', ...
t, joint_trajectory(:, 4), 'm', t, joint_trajectory(:, 5), 'c', t, joint_trajectory(:, 6), 'y');
xlabel('Normalized Time');
ylabel('Angle (rad)');
title('Joint Angles');
subplot(3, 2, 2);
plot(t, diff(joint_trajectory(:, 1))/dt, 'r', t, diff(joint_trajectory(:, 2))/dt, 'g', ...
t, diff(joint_trajectory(:, 3))/dt, 'b', t, diff(joint_trajectory(:, 4))/dt, 'm', ...
t, diff(joint_trajectory(:, 5))/dt, 'c', t, diff(joint_trajectory(:, 6))/dt, 'y');
xlabel('Normalized Time');
ylabel('Velocity (rad/s)');
title('Joint Velocities');
subplot(3, 2, 3);
plot(t, diff(diff(joint_trajectory(:, 1)))/dt^2, 'r', t, diff(diff(joint_trajectory(:, 2)))/dt^2, 'g', ...
t, diff(diff(joint_trajectory(:, 3)))/dt^2, 'b', t, diff(diff(joint_trajectory(:, 4)))/dt^2, 'm', ...
t, diff(diff(joint_trajectory(:, 5)))/dt^2, 'c', t, diff(diff(joint_trajectory(:, 6)))/dt^2, 'y');
xlabel('Normalized Time');
ylabel('Acceleration (rad/s^2)');
title('Joint Accelerations');
% 绘制末端执行器速度和加速度
subplot(3, 2, 4);
plot(t, diff(end_effector_positions(:, 1))/dt, 'r', t, diff(end_effector_positions(:, 2))/dt, 'g', ...
t, diff(end_effector_positions(:, 3))/dt, 'b');
xlabel('Normalized Time');
ylabel('Velocity (m/s)');
title('End Effector Velocities');
subplot(3, 2, 5);
plot(t, diff(diff(end_effector_positions(:, 1)))/dt^2, 'r', t, diff(diff(end_effector_positions(:, 2)))/dt^2, 'g', ...
t, diff(diff(end_effector_positions(:, 3)))/dt^2, 'b');
xlabel('Normalized Time');
ylabel('Acceleration (m/s^2)');
title('End Effector Accelerations');
代码说明
-
机械臂模型创建:
- 使用
rigidBodyTree创建机械臂模型。 - 添加连杆和关节,并设置连杆长度。
- 使用
-
初始关节角度和目标位置:
- 定义初始关节角度和目标位置(笛卡尔空间)。
-
时间参数和轨迹插值:
- 定义总时间和时间步长,并生成从初始位置到目标位置的笛卡尔空间轨迹。
-
逆向运动学计算:
- 使用
inverseKinematics计算每个时间步的关节角度。
- 使用
-
动态显示机械臂运动:
- 使用
show函数动态显示机械臂的运动过程。
- 使用
-
正向运动学计算:
- 使用正向运动学计算每个时间步的末端执行器位置。
-
绘制结果:
- 绘制关节角度、速度和加速度,以及末端执行器的速度和加速度。
通过这些步骤,您可以实现机械臂在笛卡尔空间中的轨迹规划,并动态显示其运动过程。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









