






多传感器数据融合技术在导航、目标跟踪等领域发展迅速,已成为提升系统精度与可靠性的关键手段。AFUKF-MODF的出现,进一步强化了其在复杂环境下的适应性,为高精度导航与智能系统发展注入新动力。
AFUKF-MODF在无人机的惯性导航系统(INS)、全球导航卫星系统(GNSS)和天文导航系统(CNS)集成中表现出色。它能够有效抑制过程建模误差,提高无人机在复杂动态环境中的导航精度和稳定性,减少位置、速度和姿态误差
提出基于马氏距离的自适应衰减UKF(AFUKF),结合无迹变换(UT)实现多传感器最优融合,有效抑制过程建模误差,提升融合精度。
我整理了9种【长短卡尔曼LSK】的相关论文,全部论文PDF版可以关注工棕号{AI因斯坦}
回复 “卡尔曼 ”领取~
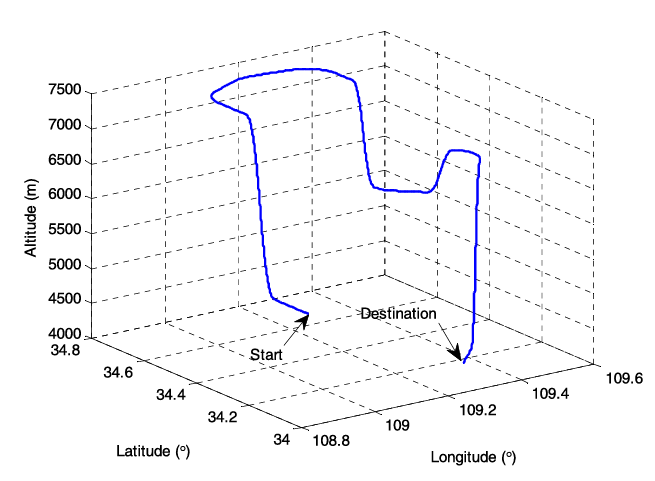
1.A new direct filtering approach to INS/GNSS integration
文章提出一种 INS/GNSS 集成的直接滤波方法,构建运动学模型并改进强跟踪无迹卡尔曼滤波算法,经仿真和实验验证,能有效抵抗模型误差干扰,提升导航精度。
-
创新点
1.建立结合惯性导航方程与 IMU 误差方程的运动学模型,可获取姿态信息,更精确描述系统状态动态变化。
2.提出改进的强跟踪无迹卡尔曼滤波器(RSTUKF),通过假设检验策略识别运动学模型误差。
3.RSTUKF 根据模型误差情况引入次优渐消因子(SFF),在模型有误差时削弱先验信息影响,无误差时保持最优估计 。
-
研究结论
1.RSTUKF 能有效抵抗运动学模型误差对状态估计的干扰,提高 INS/GNSS 集成系统的导航精度。
2.RSTUKF 克服了 STUKF 的局限性,在模型无误差时也能保持较高估计精度。
3.仿真和实验结果表明,该方法在 INS/GNSS 集成导航中性能优越,计算速度和内存消耗满足实时性要求。
全部论文PDF版可以关注工棕号{AI因斯坦}
回复 “卡尔曼 ”领取~
2.Multi-Sensor Optimal Data Fusion Based on the Adaptive Fading Unscented
Kalman Filter
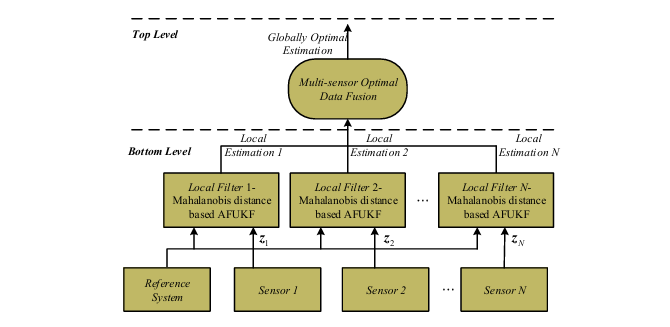
文章提出基于自适应渐消无迹卡尔曼滤波(AFUKF)的多传感器最优数据融合方法,通过构建两级融合结构,经仿真和实验验证,可提升多传感器数据融合的适应性和鲁棒性,实现全局最优融合。
-
创新点
1.设计基于马氏距离的 AFUKF 作为局部滤波器,增强局部状态估计对过程建模误差的适应性与鲁棒性。
2.建立基于无迹变换(UT)的多传感器最优数据融合机制,依据线性最小方差准则计算全局最优状态估计。
3.构建两级融合结构,底层处理局部估计,顶层实现全局融合,有效抑制过程建模误差对融合结果的影响。
-
研究结论
1.所提 AFUKF-MODF 方法能有效抵抗过程建模误差对融合结果的干扰,提高多传感器数据融合的适应性和鲁棒性。
2.该方法基于线性最小方差准则实现全局最优融合,相比 FKF、UKF-FKF 和 UKF-MODF,导航精度更高。
3.未来可结合人工智能技术进一步改进该方法,并拓展其在其他领域的应用 。
全部论文PDF版可以关注工棕号{AI因斯坦}
回复 “ 卡尔曼”领取~
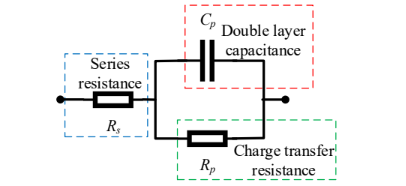
3.A Randles Circuit Parameter Estimation of Li-ion Batteries with Embedded Hardware
文章针对 Randles 电路参数估计难题,提出适用于嵌入式硬件的低复杂度方法,经理论、数值和实验验证,该方法准确高效,在锂离子电池参数估计等场景有良好表现。
-
创新点
1.提出基于阻抗实部和虚部及其实虚部商的一阶导数数值近似的非迭代算法,计算简单且无需初始猜测值。
2.仅需 3 个频率测量数据就能得到初始估计值,可减少测量与维护间的延迟。
3.算法不依赖特定软件平台,具有高度可移植性,能在资源受限的嵌入式硬件上运行。
-
研究结论
1.所提方法估计精度高,在不同测量点数和有无噪声情况下,相对误差均在较低水平。
2.该方法在微控制器平台上运行高效,功耗低、速度快,适用于电池监测等场景。
3.未来可探索将阻抗测量和原位参数估计单元集成到便携式设备中,进一步降低功耗。
全部论文PDF版可以关注工棕号{AI因斯坦}
回复 “卡尔曼”领取~
顶会投稿交流群来啦!
欢迎大家加入顶会投稿交流群一起交流~这里会实时更新AI领域最新资讯、顶会最新动态等信息~


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









