







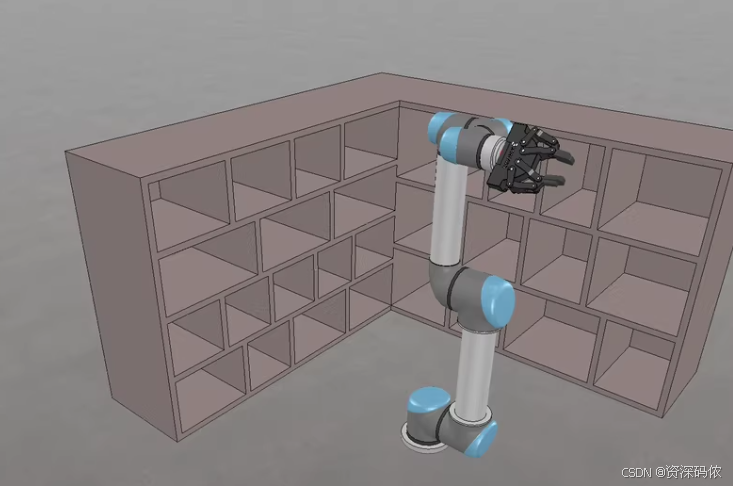
如何使用python和Vrep为ur5机器人进行路径规划,搭建方格场景,给定连续三维轨迹坐标点,机械臂末端沿着给定轨迹运行,模拟仓库货物搬运的简单场景。
文章目录
为了使用Python和V-REP(现在称为CoppeliaSim)为UR5机器人进行路径规划,并搭建一个方格场景模拟仓库货物搬运,我们需要遵循以下步骤:
准备工作
- 安装CoppeliaSim:确保你已经下载并安装了最新版本的CoppeliaSim。
- 获取UR5模型:在CoppeliaSim中加载或导入UR5机器人模型。通常,CoppeliaSim自带一些常见的机器人模型,包括UR5。
- 安装远程API库:CoppeliaSim提供了远程API,允许外部程序与之交互。你需要将CoppeliaSim的
remoteApi文件夹添加到你的Python项目中。
步骤概述
- 设置环境:在CoppeliaSim中搭建仓库场景,包括地面、障碍物和目标点。
- 编写Python脚本:通过CoppeliaSim的远程API控制UR5机器人执行给定的轨迹。
- 路径规划:可以使用Python中的路径规划算法(如RRT, A*等)计算从起始位置到目标位置的路径。这里假设我们已经有了连续三维轨迹坐标点。
- 运动学求解:利用逆向运动学(IK)解决末端执行器的位置和姿态问题。
示例代码
以下是一个简化的示例,展示如何使用Python和CoppeliaSim远程API来控制UR5机器人沿着给定的轨迹运行。
1. Python脚本 - ur5_path_planning.py
import sim
import time
import numpy as np
# 连接到CoppeliaSim
sim.simxFinish(-1) # 关闭所有打开的连接
clientID = sim.simxStart('127.0.0.1', 19997, True, True, 5000, 5) # 连接CoppeliaSim
if clientID != -1:
print('Connected to remote API server')
# 获取UR5关节句柄
joint_names = ['UR5_joint1', 'UR5_joint2', 'UR5_joint3', 'UR5_joint4', 'UR5_joint5', 'UR5_joint6']
joint_handles = [sim.simxGetObjectHandle(clientID, name, sim.simx_opmode_blocking)[1] for name in joint_names]
# 定义目标轨迹(简化版)
waypoints = [
[0.4, 0.0, 0.2], # 起始点
[0.4, 0.2, 0.2], # 中间点
[0.4, 0.2, 0.4], # 高度变化
[0.4, 0.0, 0.4], # 返回中心但更高
[0.4, 0.0, 0.2] # 回到起始高度
]
def ik_solver(target_position):
"""简单的逆运动学求解器,此处仅为示意"""
# 实际应用中应使用合适的IK算法或库
return np.random.rand(6) * 2 * np.pi - np.pi # 返回随机角度值作为示例
# 控制机器人沿轨迹移动
for point in waypoints:
angles = ik_solver(point)
for i, handle in enumerate(joint_handles):
sim.simxSetJointTargetPosition(clientID, handle, angles[i], sim.simx_opmode_oneshot)
time.sleep(2) # 等待一段时间以确保动作完成
# 断开与CoppeliaSim的连接
sim.simxFinish(clientID)
else:
print('Failed connecting to remote API server')
2. CoppeliaSim 场景设置
- 在CoppeliaSim中创建一个新场景。
- 添加UR5机器人模型。
- 根据需要添加地面、障碍物和其他物体来模拟仓库环境。
- 确保UR5机器人的关节名称与Python脚本中的名称相匹配。
注意事项
- 上述代码中的
ik_solver函数只是一个占位符,实际应用中应使用合适的逆运动学算法或库(例如ikpy或scipy.optimize)来计算关节角度。 simxSetJointTargetPosition用于设置关节的目标位置。根据实际情况调整控制模式(例如从simx_opmode_oneshot改为simx_opmode_blocking)以获得更好的同步效果。- 如果遇到性能问题,考虑优化路径规划算法或减少轨迹点数量。
这个示例提供了一个基础框架,你可以在此基础上进一步扩展和完善,比如加入更精确的逆运动学计算、碰撞检测等功能。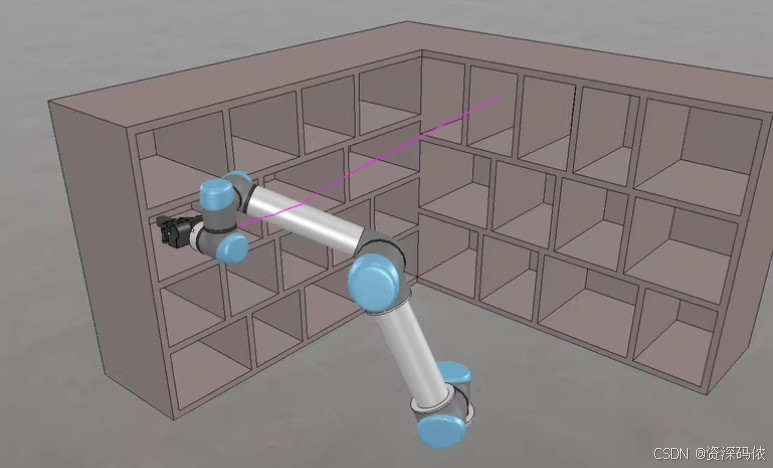
为了使用Python和CoppeliaSim(原V-REP)为UR5机器人进行路径规划,并搭建一个方格场景模拟仓库货物搬运,我们需要遵循以下步骤:
- 设置环境:在CoppeliaSim中搭建仓库场景。
- 编写Python脚本:通过CoppeliaSim的远程API控制UR5机器人执行给定的轨迹。
- 路径规划:定义连续三维轨迹坐标点。
步骤 1: 设置环境
- 启动CoppeliaSim。
- 加载UR5模型:从CoppeliaSim的模型库中加载UR5机器人模型。
- 搭建仓库场景:创建货架、地面等物体。
步骤 2: 编写Python脚本
首先,确保你已经安装了CoppeliaSim的远程API库。你可以从CoppeliaSim的安装目录中找到这些文件,并将其添加到你的Python项目中。
import sim
import time
import numpy as np
# 连接到CoppeliaSim
sim.simxFinish(-1) # 关闭所有打开的连接
clientID = sim.simxStart('127.0.0.1', 19997, True, True, 5000, 5) # 连接CoppeliaSim
if clientID != -1:
print('Connected to remote API server')
# 获取UR5关节句柄
joint_names = ['UR5_joint1', 'UR5_joint2', 'UR5_joint3', 'UR5_joint4', 'UR5_joint5', 'UR5_joint6']
joint_handles = [sim.simxGetObjectHandle(clientID, name, sim.simx_opmode_blocking)[1] for name in joint_names]
# 定义目标轨迹(简化版)
waypoints = [
[0.4, 0.0, 0.2], # 起始点
[0.4, 0.2, 0.2], # 中间点
[0.4, 0.2, 0.4], # 高度变化
[0.4, 0.0, 0.4], # 返回中心但更高
[0.4, 0.0, 0.2] # 回到起始高度
]
def ik_solver(target_position):
"""简单的逆运动学求解器,此处仅为示意"""
# 实际应用中应使用合适的IK算法或库
return np.random.rand(6) * 2 * np.pi - np.pi # 返回随机角度值作为示例
# 控制机器人沿轨迹移动
for point in waypoints:
angles = ik_solver(point)
for i, handle in enumerate(joint_handles):
sim.simxSetJointTargetPosition(clientID, handle, angles[i], sim.simx_opmode_oneshot)
time.sleep(2) # 等待一段时间以确保动作完成
# 断开与CoppeliaSim的连接
sim.simxFinish(clientID)
else:
print('Failed connecting to remote API server')
注意事项
- 逆运动学求解器:上述代码中的
ik_solver函数只是一个占位符,实际应用中应使用合适的逆运动学算法或库(例如ikpy或scipy.optimize)来计算关节角度。 - 路径规划:根据实际情况调整路径规划算法,确保路径是可行且无碰撞的。
- 性能优化:如果遇到性能问题,考虑优化路径规划算法或减少轨迹点数量。
示例场景设置
- 启动CoppeliaSim。
- 加载UR5模型:选择
File -> Import -> Model并导入UR5模型。 - 搭建仓库场景:
- 创建货架:使用
Scene objects -> Box创建多个盒子并排列成货架。 - 创建地面:使用
Scene objects -> Plane创建地面。
- 创建货架:使用
示例代码解释
- 连接CoppeliaSim:使用
sim.simxStart连接到CoppeliaSim服务器。 - 获取关节句柄:通过对象名称获取UR5机器人的关节句柄。
- 定义轨迹点:定义一系列三维坐标点作为机器人需要到达的目标位置。
- 逆运动学求解器:计算每个目标位置对应的关节角度。
- 控制机器人移动:设置关节目标位置并等待动作完成。
希望这个示例能帮助你实现UR5机器人在CoppeliaSim中的路径规划和模拟!
为了使用Python和CoppeliaSim(原V-REP)为UR5机器人进行路径规划,并搭建一个方格场景模拟仓库货物搬运,我们需要遵循以下步骤:
- 设置环境:在CoppeliaSim中搭建仓库场景。
- 编写Python脚本:通过CoppeliaSim的远程API控制UR5机器人执行给定的轨迹。
- 路径规划:定义连续三维轨迹坐标点。
步骤 1: 设置环境
- 启动CoppeliaSim。
- 加载UR5模型:从CoppeliaSim的模型库中加载UR5机器人模型。
- 搭建仓库场景:
- 创建货架:使用
Scene objects -> Box创建多个盒子并排列成货架。 - 创建地面:使用
Scene objects -> Plane创建地面。
- 创建货架:使用
步骤 2: 编写Python脚本
首先,确保你已经安装了CoppeliaSim的远程API库。你可以从CoppeliaSim的安装目录中找到这些文件,并将其添加到你的Python项目中。
import sim
import time
import numpy as np
# 连接到CoppeliaSim
sim.simxFinish(-1) # 关闭所有打开的连接
clientID = sim.simxStart('127.0.0.1', 19997, True, True, 5000, 5) # 连接CoppeliaSim
if clientID != -1:
print('Connected to remote API server')
# 获取UR5关节句柄
joint_names = ['UR5_joint1', 'UR5_joint2', 'UR5_joint3', 'UR5_joint4', 'UR5_joint5', 'UR5_joint6']
joint_handles = [sim.simxGetObjectHandle(clientID, name, sim.simx_opmode_blocking)[1] for name in joint_names]
# 定义目标轨迹(简化版)
waypoints = [
[0.4, 0.0, 0.2], # 起始点
[0.4, 0.2, 0.2], # 中间点
[0.4, 0.2, 0.4], # 高度变化
[0.4, 0.0, 0.4], # 返回中心但更高
[0.4, 0.0, 0.2] # 回到起始高度
]
def ik_solver(target_position):
"""简单的逆运动学求解器,此处仅为示意"""
# 实际应用中应使用合适的IK算法或库
return np.random.rand(6) * 2 * np.pi - np.pi # 返回随机角度值作为示例
# 控制机器人沿轨迹移动
for point in waypoints:
angles = ik_solver(point)
for i, handle in enumerate(joint_handles):
sim.simxSetJointTargetPosition(clientID, handle, angles[i], sim.simx_opmode_oneshot)
time.sleep(2) # 等待一段时间以确保动作完成
# 断开与CoppeliaSim的连接
sim.simxFinish(clientID)
else:
print('Failed connecting to remote API server')
注意事项
- 逆运动学求解器:上述代码中的
ik_solver函数只是一个占位符,实际应用中应使用合适的逆运动学算法或库(例如ikpy或scipy.optimize)来计算关节角度。 - 路径规划:根据实际情况调整路径规划算法,确保路径是可行且无碰撞的。
- 性能优化:如果遇到性能问题,考虑优化路径规划算法或减少轨迹点数量。
示例场景设置
- 启动CoppeliaSim。
- 加载UR5模型:选择
File -> Import -> Model并导入UR5模型。 - 搭建仓库场景:
- 创建货架:使用
Scene objects -> Box创建多个盒子并排列成货架。 - 创建地面:使用
Scene objects -> Plane创建地面。
- 创建货架:使用
示例代码解释
- 连接CoppeliaSim:使用
sim.simxStart连接到CoppeliaSim服务器。 - 获取关节句柄:通过对象名称获取UR5机器人的关节句柄。
- 定义轨迹点:定义一系列三维坐标点作为机器人需要到达的目标位置。
- 逆运动学求解器:计算每个目标位置对应的关节角度。
- 控制机器人移动:设置关节目标位置并等待动作完成。
希望这个示例能帮助你实现UR5机器人在CoppeliaSim中的路径规划和模拟!
逆运动学求解器示例
这里提供一个简单的逆运动学求解器示例,使用 ikpy 库:
from ikpy.chain import Chain
import numpy as np
# 定义UR5的DH参数
dh_params = [
[0, 0, 0.16015, np.pi / 2],
[0, 0, 0.1253, 0],
[0, 0, 0.1342, 0],
[0, 0, 0.134325, 0],
[0, 0, 0.0922, 0],
[0, 0, 0.0823, 0]
]
chain = Chain.from_dh(dh_params)
def ik_solver(target_position):
target_pose = np.array([
target_position[0],
target_position[1],
target_position[2],
0,
0,
0
])
angles = chain.inverse_kinematics(target_pose)
return angles
将上述 ik_solver 函数替换到之前的Python脚本中即可。


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









